

Полное уравновешивание вращающегося тела
Полное уравновешивание применяется для деталей, длина которых больше или соизмерима с диаметром.
Для таких деталей должны выполняться оба условия
![]() ,
,
![]() .
.
Рассмотрим полное уравновешивание цилиндрической детали, содержащей 3 неуравновешенных массы m1,m2, m3, расположенных в плоскостях I, II, III на расстояниях ρ1, ρ2, ρ3 от оси вращения детали.
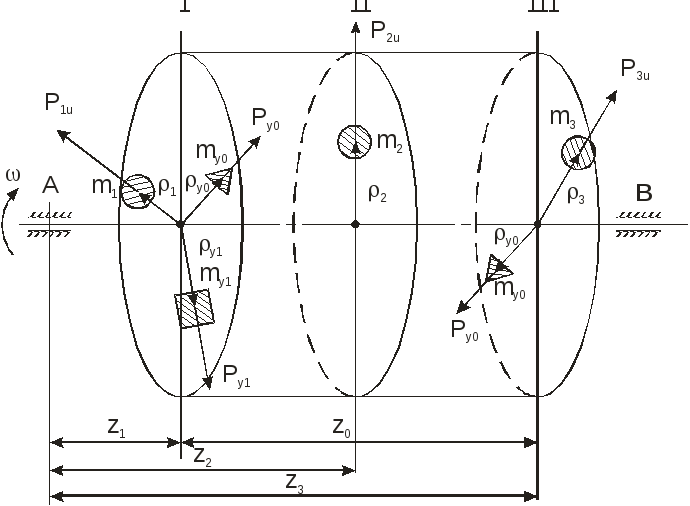
Рис. 90
Рассмотрим 1-е
условие
![]() .
.
Для выполнения
этого условия введем в любой плоскости
(например, в плоскости I)
дополнительную массу
![]() на расстоянии
на расстоянии![]() от оси вращения (рис. 90).
от оси вращения (рис. 90).
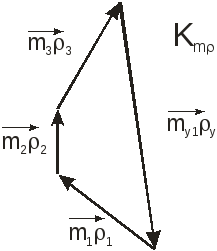
Уравнение равновесия статических моментов масс
![]() .
.
План статических моментов масс представлен на рис. 91 в масштабе Kmρ.
|
|
|
|
Рис. 91 |
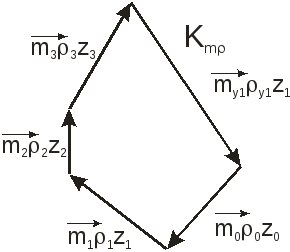
Рис. 92 |
После выбора места
расположения дополнительной массы
(длина радиус-вектора
![]() )
рассчитывается
)
рассчитывается![]() .
.
Рассмотрим 2-е
условие
![]() .
.
|
| ||
|
где |
|
расстояние
от линии действия силы |
Для обеспечения
равновесия детали введем в сечения I
и III
две дополнительные массы
![]() на расстоянии
на расстоянии![]() от оси вращения. Пара сил
от оси вращения. Пара сил![]() с плечом
с плечом![]() обеспечивают равновесие системы.
обеспечивают равновесие системы.
Запишем уравнение равновесия
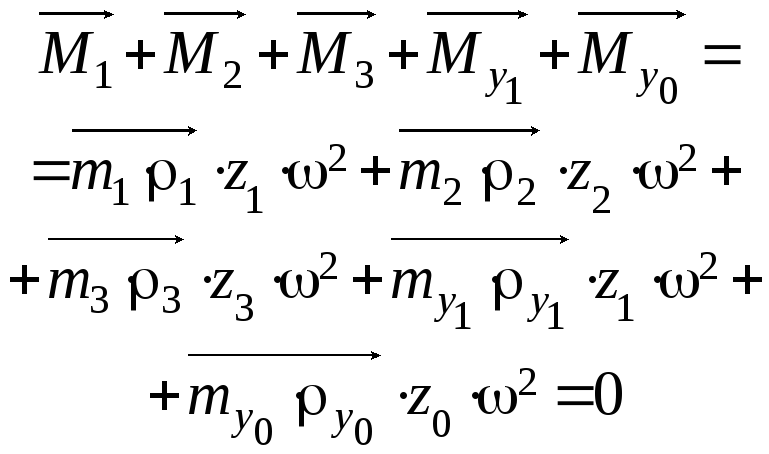 .
.
После сокращения на ω2 получим
![]() .
.
Графическое решение в виде векторного многоугольника представлено на рис. 92.
По аналогии с
предыдущим решением, после определения
места расположения дополнительных масс
![]() ,
обеспечивающих динамическое равновесие
(длина радиус-вектора
,
обеспечивающих динамическое равновесие
(длина радиус-вектора![]() ),
с учетом масштаба построенияKmρ,
рассчитываются величины масс.
),
с учетом масштаба построенияKmρ,
рассчитываются величины масс.
Две дополнительные
массы
![]() и
и![]() в плоскостиI
можно заменить одной массой в соответствии
с принципом статического уравновешивания.
в плоскостиI
можно заменить одной массой в соответствии
с принципом статического уравновешивания.
Библиографический список.
1. Теория механизмов и механика машин. Под ред. К.В.Фролова. – М: Высшая школа, 2003.-496 с.
2. Теория механизмов и машин: учебное пособие/ М.З.Коловский и др. – М.: Academia, 2006. – 560c.
3. Смелягин А.И. Теория механизмов и машин. Курсовое проектирование: учебное пособие/А.И.Смелягин, Новосибирск – М.: ИНФРА-М: НГТУ, 2006, 263 с.
4. Покровский В.Б. Теория механизмов и машин: Методические указания к курсовому проекту/ В.Б.Покровский – Екатеринбург:УГТУ-УПИ, 2005, 11 с.
5. Бубнов Э.А., Черненко А.Г. Теория механизмов и машин. Пример выполнения курсового проекта: методические указания для выполнения курсового проекта/Э.А.Бубнов,А.Г.Черненко-Екатеринбург:УГТУ-УПИ,2005,36с.
6. Бубнов Э.А., Черненко А.Г. Теория механизмов и машин. Содержание и оформление курсового проекта: методические указания/Э.А.Бубнов, А.Г.Черненко – Екатеринбург: УГТУ – УПИ, 2006, 42 с.
7.Артоболевский.И.И. Теория механизмов и машин/ И.И..Артоболевский. М.:Наука, 1988.
8. Юдин.В.А Теория механизмов и машин/ В.А. Юдин, Л.В. Петрокас. М.: Высшая школа, 1977.
9.Попов_С.А. Курсовое проектирование по теории механизмов и механике машин/ С.А. Попов. М.: Высшая школа, 1986.
10.Теория механизмов и машин. Проектирование/ под редакцией Кульбачного/О.И. М.: Высшая школа, 1970.
11.Крайнев_А.Ф. Словарь_–_справочник по механизмам/ А.Ф._Крайнев._ М.:_Машиностроение, 1987.
Учебное издание
Владимир Борисович Покровский, Игорь Витальевич Троицкий
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН.
СТРОЕНИЕ МЕХАНИЗМОВ.
КИНЕМАТИКА ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ.
КУЛАЧКОВЫЕ МЕХАНИЗМЫ.
ТРЕНИЕ В КИНЕМАТИЧЕСКИХ ПАРАХ.
УРАВНОВЕШИВАНИЕ И ВИБРОЗАЩИТА МЕХАНИЗМОВ И МАШИН
Корректор
Компьютерная верстка: А. Бакин
Подписано в печать Формат 60×84 1/16 Бумага типографическая Офсетная печать Усл. печ. л. Уч.-изд. Тираж Заказ Цена “C”
Издательство ГОУ ВПО УГТУ-УПИ