

Лекция 16 Определение минимального радиуса кулачка при вращательном движении ведомого звена.
Рассмотрим влияние углов давления и передачи на работоспособность кулачкового механизма с коромыслом (рис. 74).
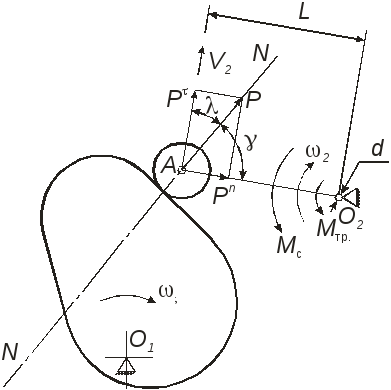
Рис. 74
Движение коромысла будет возможно при выполнении условия
|
| ||
|
где |
L – |
длина коромысла; |
|
|
Mс – |
момент технологического сопротивления; |
|
|
Mтр – |
момент трения в шарнире O2. |
|
|
|
|
|
где |
d – |
диаметр шарнира. |

С ростом угла давления λ уменьшается составляющая силы нормального давления Pτ и возрастает Pn, что, как и в механизме с толкателем, может привести к самозаклиниванию механизма, поскольку возрастает Mтр.
Основываясь на теоретических положениях, рассмотренных для механизма с поступательным толкателем, можно графически построениями определить минимальный радиус теоретического профиля кулачка.
Для этого выбирается масштаб построения KS и в этом масштабе изображается коромысло AO2 длиной L (рис. 75) во всех положениях механизма.

Рис. 75
Через каждую точку
траектории движения центра ролика
коромысла проводятся линии к центру O2
и на них откладываются значения аналогов
окружной скорости центра ролика коромысла
(точка A)
![]() в масштабеKS.
Причем, если направления ω1
и ω2
совпадают, то значения аналогов
откладываются от траектории к центру
O2,
а при противоположных направлениях.–
от центра O2.
в масштабеKS.
Причем, если направления ω1
и ω2
совпадают, то значения аналогов
откладываются от траектории к центру
O2,
а при противоположных направлениях.–
от центра O2.
В каждой из точек диаграммы проводятся лучи под углом γmin к линиям, проведенным к центру O2.
Условие γi ≥ γmin будет выполняться в том случае, если в качестве центра вращения кулачка O1 будет выбрана точка пересечения лучей, наиболее удаленная от начала траектории движения точки A или любая точка внутри заштрихованной зоны.
Лекция 17 Профилирование кулачков.
Профилирование кулачков проводится методом обращенного движения, в соответствии с которым кулачковому механизму сообщается дополнительное (обращенное) движение с угловой скоростью равной по величине и противоположной по направлению угловой скорости кулачка ω1.
Кулачок при этом становится неподвижным, а ведомое звено совершает сложное движение.
Профилирование кулачков в механизмах с центральным толкателем.
Задается масштаб
построения
![]() и в этом масштабе изображается положение
центра вращения кулачкаO1',
выбранное по диаграмме зависимости
аналога скорости
и в этом масштабе изображается положение
центра вращения кулачкаO1',
выбранное по диаграмме зависимости
аналога скорости
![]() от перемещения толкателяS2.
А также размечается траектория движения
центра ролика толкателя (рис. 76).
от перемещения толкателяS2.
А также размечается траектория движения
центра ролика толкателя (рис. 76).
Изображаются положения толкателя на границах фазовых углов в обращенном движении и эти углы разбиваются на участки в соответствии с положениями механизма (деления оси абсцисс φ1 в кинематических диаграммах).
|
|
|
Рис. 76 |
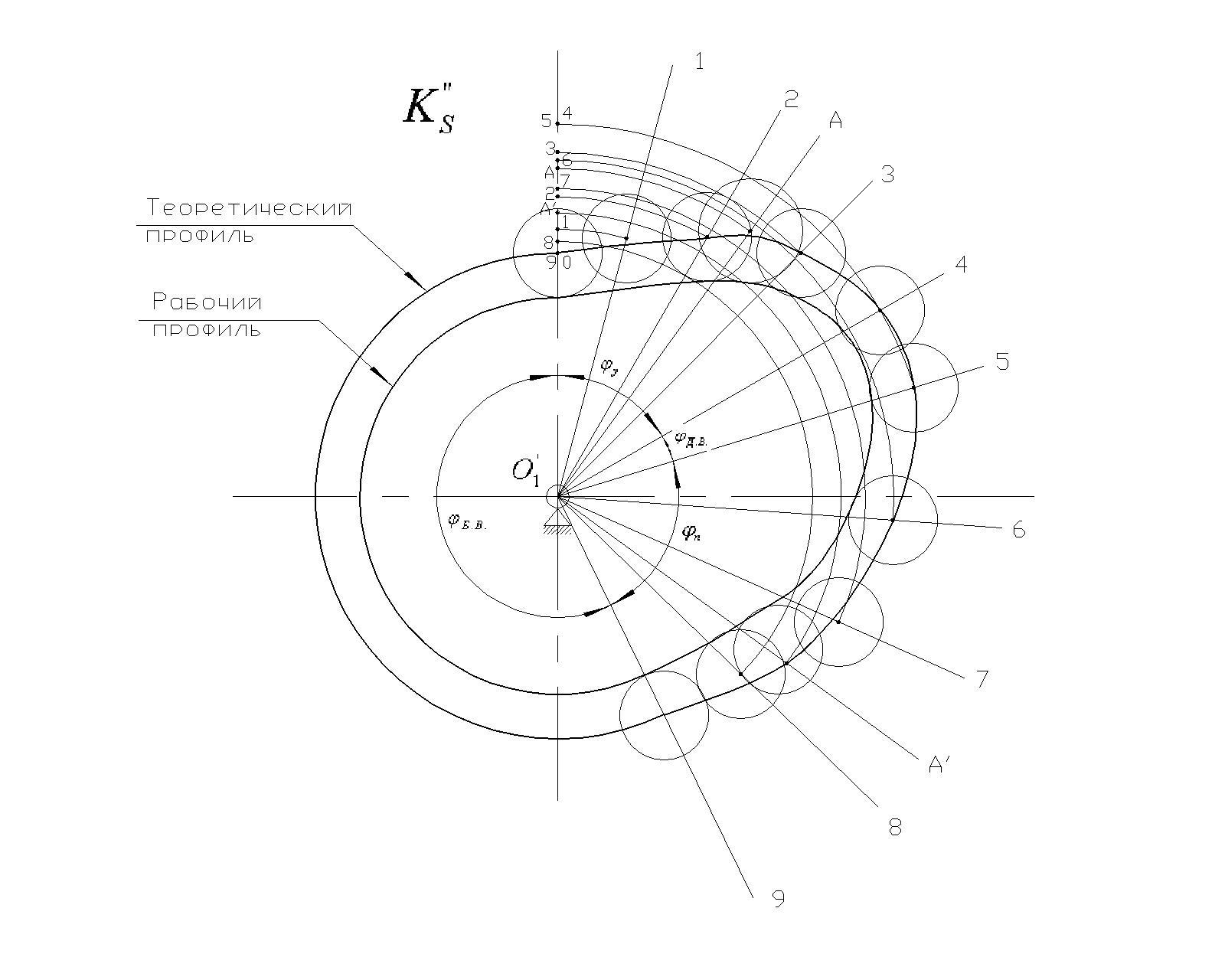
В каждом из положений изображается толкатель в обращенном движении. Проекция точки траектории движения центра ролика толкателя на соответствующее положение толкателя в обращенном движении, формирует теоретический профиль кулачка.
Рабочий профиль кулачка контактирует с роликом толкателя. Радиус ролика определяется как наименьшее значение, из полученных по зависимостям
|
rp = 0,4·rmin; rp = 0,8·Rmin, | ||
|
где |
rmin – |
минимальный радиус теоретического профиля кулачка (рис. 73); |
|
|
Rmin – |
минимальный радиус кривизны теоретического профиля. |
В каждой из точек
теоретического профиля в масштабе
![]()
изображаются окружности с радиусом rp.
Касательно к окружностям проводятся
рабочий профиль кулачка, т.е. моделируется
процесс обращенного движения толкателя
с роликом.
изображаются окружности с радиусом rp.
Касательно к окружностям проводятся
рабочий профиль кулачка, т.е. моделируется
процесс обращенного движения толкателя
с роликом.