

63
Контрольные вопросы
1.Почему каждая молекула на поверхности жидкости обладает дополнительной потенциальной энергией? Чему равна поверхностная энергия жидкости?
2.Как возникает, где приложена и куда направлена сила поверхностного натяжения?
3.Что такое периметр смачивания? В чем разница между смачивающей и несмачивающей жидкостью?
4.Что такое мениск и краевой угол смачивания? Как наличие мениска связано с капиллярным давлением?
5.Что такое коэффициент поверхностного натяжения, и в каких единицах он измеряется?
6.Чему равна сила поверхностного натяжения, приложенная к кольцу?
7.Каким образом при помощи крутильных весов измеряется коэффициент поверхностного натяжения?
8.Почему измерительный рычаг должен быть горизонтальным?
64
РАБОТА 11 ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ КРУГЛОЙ
ПЛАТФОРМЫ
Приборы и принадлежности: круглая платформа, секундомер, штангенциркуль, миллиметровая линейка.
Введение. Основной закон вращательного движения твёрдого тела записывается в следующем виде:
I0 ε = ∑M0 , |
(1) |
где I0 – момент инерции тела относительно оси, проходящей через центр вращения 0; ε – его угловое ускорение; ∑M0 – сумма моментов сил
относительно 0, приложенных к телу. Определив из опыта угловое ускорение ε и момент сил M 0, можно найти момент инерции твёрдого тела.
Описание установки и метода измерений. В настоящей работе применяется диск с большим моментом инерции. Диск массой m1 и радиусом R может вращаться вместе с закрепленным на нём лёгким шкивом радиусом r вокруг вертикальной оси с малым трением. При помощи груза массой m2, подвешенного к концу нити, намотанной на шкив, диск может вращаться вокруг вертикальной оси. Согласно формуле (1) уравнение движения диска с учётом сил трения можно записать в виде
I 0 ε =M 0 =T r −Mтр , |
(2) |
а уравнение поступательного движения груза на нити
m2 a = m2 g −T , |
(3) |
где ε – угловое ускорение маятника; Мтр – тормозящий момент сил трения в оси; r – радиус шкива, на который намотана нить; Т – натяжение нити; a – ускорение движения груза на нити; m2 – масса груза, причём
a = ε r |
|
|
|
|
|
|
|
|
(4) |
||
Уравнения (2) – (4) дают постоянное |
|
во |
времени |
значение ускорения |
|||||||
поступательного движения груза на нити a |
|
|
m r2 g − M |
тр |
r |
, которое может быть |
|||||
= |
|
2 |
|
|
|
|
|||||
|
I |
0 |
+m r2 |
|
|
||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
2 |
|
|
|
|
|
найдено также из кинематического уравнения равноускоренного движения |
|||||||||||
a = |
2h |
|
, |
|
|
|
|
|
|
|
(5) |
t 2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
65
где h – расстояние, проходимое грузом за время t. В условиях задачи h – постоянная величина. При различных грузах меняются моменты сил и ускорения, а их отношение остаётся постоянным:
|
M 01− Mтр |
= |
M 02− Mтр |
= |
M 03− Mтр |
. |
|
|
(6) |
|
|
ε1 |
|
|
|
|
|||||
|
|
ε2 |
ε3 |
|
|
|
||||
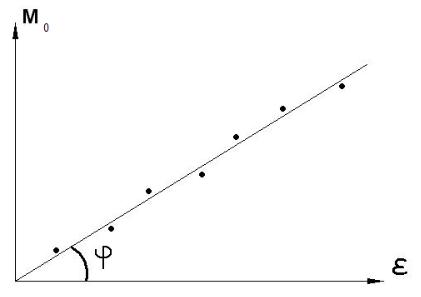
На графике зависимости момента сил Мо = М 0 вр− Мтр , где М0 вр |
определяется |
|||||||||
по формуле М 0 вр=T r = m2 (g −a)r , |
от углового ускорения ε = a |
= |
2h |
(рис. 1) |
||||||
t 2 r |
||||||||||
|
|
|
|
|
|
r |
|
|
||
тангенс угла наклона прямой как раз и даёт значение момента инерции.
рис. 1
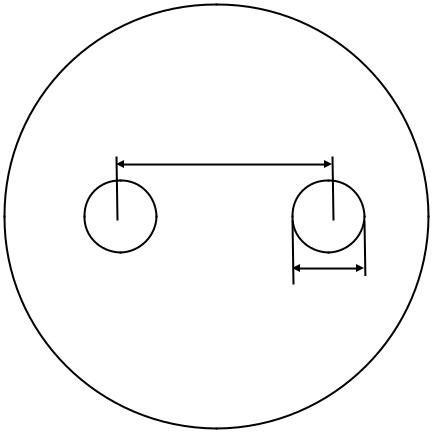
Если на платформу (диск) (рис. 2) симметрично относительно центра положить два одинаковых груза массой m3 и радиусами R1 с моментами
инерции I C=m 3 R 12 / 2 относительно их центров масс С соответственно, причем
каждый на расстоянии b от центра основного диска 0, то согласно теореме Штейнера момент инерции указанных грузов относительно оси, проходящей через центр платформы, будет равен
I |
01 |
= 2 (I |
C |
+ m b 2). |
(7) |
|
|
3 |
|
Определив из графика момент инерции с грузами I0 2 = I 0+ I 01 (I0 – момент
инерции платформы относительно оси вращения), можно экспериментально убедиться в справедливости теоремы Штейнера.
66
2b
2R1
рис. 2
Порядок выполнения работы
1. Записывают приведённую на установке массу платформы m1 , массу одного из подвешиваемых на нити груза mo , массы дисков m3 и тормозящий момент сил трения Мтр . В дисплейном классе рассчитывают момент сил трения. При желании его значение можно определить из формул (6).
2. Измеряют линейкой высоту h опускания груза на нити, и штангенциркулем диаметр шкива 2r , диаметр платформы 2R , диаметр двух одинаковых дисков 2R1 и расстояние между штырями на платформе 2b.
3. Измеряют с помощью секундомера время падения груза m2 при четырёх различных значениях m2 = mo ; 2mo; 3mo; 4mo. Массы перегрузков mo не одинаковы, и указаны на установке. Поэтому, если mo1 = 57 г.; а mo2 = 55,5 г.; то 2mo = mo1 + mo2 = 112,5 г. и т.д. (измерения в каждом случае проводят не менее трёх раз).
4.Располагают на диске на фиксированных штырями расстояниях от оси два диска, и повторяют все указанные выше измерения.
5.Данные измерений заносят в таблицу.
Таблица

67
m1 = |
|
|
mo = |
|
m3 = |
|
M тр = |
|
|
|
|
|
|
|
||
h = |
|
r = |
|
R = |
R1 = |
b = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пустая платформа |
|
|
|
|
|
|
|
|
|
|
|
№ |
t |
tср |
a |
ε |
M o = m3 (g − a)r − M тр |
I |
|
= |
M |
0 |
I |
|
= |
m R2 |
||
|
|
|
0 |
|
0 |
1 |
|
|||||||||
|
|
|
ε |
|
2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
m2 = mo
1
2
3
m2 = 2mo
1
2
3
m2 = 3mo
1
2
3
m2 = 4mo
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Платформа с дисками |
Эксперимент |
Теория |
|||||
№ |
t |
|
tср |
a |
M0 = M2 (g −a)r − Mтр |
I0 2 |
I01 = I0 2 |
I01 = |
|
||
|
|
ε |
− I |
0 |
2(I |
C |
+ m b2 ) |
||||
|
|
|
|
|
|
|
|
|
2 |
||
|
|
m2 = mo |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
m2 = 2mo
1
2
3
m2 = 3mo
1
2
3
m2 = 4mo
1
2
3
6. Строят графики зависимости M0 = f (ε) для пустой и загруженной
платформы, и по ним находят значения моментов инерции I0 пустой и I02 нагруженной платформы.
68
7. Полученные |
значения I0 и |
I 01= I0 2 − I 0 сравнивают |
|
с |
теоретическим |
||||
значением инерции |
платформы |
I 0 |
= |
m 1R2 и двух дисков |
I |
01 |
= 2(I |
C |
+ m b2 ) , где |
|
|
2 |
|
|
2 |
||||
|
|
|
|
|
|
|
|
|
|
IC = |
m3R12 |
и убеждаются в их эквивалентности (в пределах ошибок измерений). |
|
2 |
|
Контрольные вопросы
1.Какому закону, описывающему поступательное движение, аналогично уравнение (1)?
2.Показать на установке, куда в данной ситуации могут быть направлены векторы результирующего момента, угловой скорости и углового ускорения?
3.От чего зависит угловое ускорение диска?
4.Чем определяется вращающий момент, действующий на диск?
5.Как определяется по теореме Штейнера момент инерции двух дисков?
6.Как вы проводили прямую на графике зависимости M0 от ε ?
7.Какие ошибки измерений больше всего сказались на погрешности результата?
69
РАБОТА 12 ДИНАМИКА КРИВОЛИНЕЙНОГО ДВИЖЕНИЯ
Приборы и принадлежности: электронный осциллограф, источник регулируемого постоянного напряжения.
Введение. При движении материальных частиц в силовых полях, когда постоянная сила направлена перпендикулярно скорости, частица движется равноускоренно по направлению силы и равномерно по инерции в направлении первоначальной скорости. В итоге траектория движения частицы в поле сил –
парабола, и смещение частицы под действием сил |
|
||||
yo = |
at 2 |
, |
|
Vy = at , |
(1) |
|
|
||||
2 |
|
|
|
|
|
где |
|
|
|
|
|
|
|
a = |
F |
, |
(2) |
|
|
m |
|||
|
|
|
|
|
|
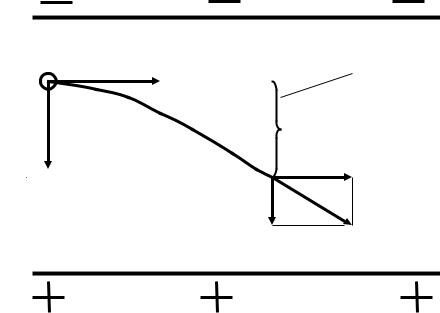
t – время действия силы. Такой частицей может быть камень, брошенный горизонтально, и тогда сила в (2) F = mg , или электрон, пролетающий между
обкладками заряженного конденсатора в электронно-лучевой трубке, и тогда сила F = eE , где Е – напряжённость электрического поля между обкладками конденсатора (рис. 1).
e |
V 0 |
|
|
|
|
|
y =a t 2 / 2 |
||
|
|
|
|
|
|
|
|
|
|
V 0
F =e E
V y =a t
рис. 1

70
Описание установки и метода измерений. В данной работе исследуется криволинейное движение электронов при пролёте обкладок конденсатора в катодно-лучевой трубке электронного осциллографа. Катодно-лучевая трубка состоит из электронной пушки, которая испускает, ускоряет и фокусирует электроны, отклоняющей системы и индикатора отклонённых электронов, заключённых в стеклянный баллон конической формы, откачанный до высокого вакуума. Электронная пушка, в свою очередь, состоит из подогревного катода, который имеет форму цилиндра, закрытого с одной стороны маленькой пластинкой, покрытой слоем вещества, хорошо испускающего электроны при нагреве. При включении осциллографа в сеть напряжение накала подаётся на катод, а высоковольтное напряжение – на ускоряющий анод, представляющий из себя цилиндр с парой диафрагм. При этом формируется электронный пучок, в котором электроны разгоняются до больших скоростей, определяемых соотношением
mV 2 |
= eUa , |
(3) |
|
o |
|||
2 |
|||
|
|
где m – масса электрона; е – заряд электрона; Vo – начальная горизонтальная скорость (рис. 1); Ua – анодное напряжение (несколько киловольт). Достигая экрана осциллографа, покрытого изнутри флуоресцирующим веществом, электроны вызывают свечение этого вещества – на экране видно яркое пятно.
Для регулировки яркости служит управляющий электрод, представляющий из себя цилиндр с маленьким отверстием, окружающий катод. При изменении его потенциала меняется количество электронов, проходящее через отверстие, и соответственно изменяется яркость пятна на экране. Для обеспечения фокусировки служит первый анод, представляющий коаксиальный с ускоряющим анодом цилиндр, имеющий несколько диафрагм. Его потенциал в несколько раз меньше потенциала управляющего анода. При этом между анодами образуется неоднородное электрическое поле (так называемая электростатическая линза), отклоняющее электроны к оси трубки. Меняя ручкой «фокусировка» напряжение на аноде, меняют размер пятна на экране осциллографа. Для отклонения пучка в вертикальном (Y) и горизонтальном (X) направлениях служат две пары плоских пластин, на которые подаются соответствующие напряжения. В нашем опыте на горизонтально отклоняющие пластины подаётся с помощью регулировки «отклонение по горизонтали» такое напряжение, чтобы пучок попал а центр экрана, а на вертикально отклоняющие напряжение от источника регулируемого постоянного напряжения U.
При пролёте конденсатора с напряжённостью поля Е = Ud , где d – расстояние
между обкладками конденсатора, электрон, как было сказано вначале, смещается по вертикали на величину yo = at22 , получает вертикальную
составляющую скорости Vy = at и дальше движется по инерции до экрана,
71
смещаясь ещё на расстояние y1 |
= L tgα = L |
Vy |
, где L – |
расстояние от |
||
|
||||||
|
|
|
|
Vo |
|
|
конденсатора до экрана; Vо – скорость электрона, определяемая соотношением |
||||||
(3). |
|
2eUa |
|
|
|
|
|
Vo2 = |
|
(4) |
|||
|
m |
|||||
|
|
|
||||
Время t определяется временем пролёта электроном обкладок конденсатора длиной l:
|
t = |
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
(5) |
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Из формул (4) – (5) легко получаем, |
что |
y |
o |
= l 2 |
|
U |
, а |
y |
= Ll |
U |
, и |
|||||
|
|
|
|
|
|
|
|
2 |
|
2dU a |
1 |
2dU a |
|
|||
окончательное смещение электронов на экране |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
y = yo + y1 |
|
|
l |
Ll |
U |
|
|
|
|
|
|
|
(6) |
|||
= 1 |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2L |
2d U a |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
(так как длина обкладок конденсатора l много меньше расстояния до экрана трубки L , то есть 2lL <<1, то
y |
Ll |
U = hU , |
(7) |
|
|||
|
2dU a |
|
|
где h – чувствительность осциллографа.
Порядок выполнения работ.
А. Знакомство с работой осциллографа.
1.Включить осциллограф в сеть и ручкой «яркость» установить нужную яркость пятна так, чтобы вокруг пятна не было ореола (при этом клавиша «Вх.Х» должна быть утоплена).
2.Ручками смещение по Х и по Y установить луч в центр экрана, и ручкой «фокусировка» установить минимальный размер пятна.
3.Подключить вход «Y» осциллографа к клеммам «6,3 В» источника питания (все подключения к источнику питания производить, отключив его от сети!!!)
4.Включить развёртку (клавиша 10–100 Гц должна быть утоплена), при этом на экране появится горизонтальная линия развёртки.
5.Включить усиление клавишей «3».
6.Включить источник питания, предварительно убрав до нуля рукоятку выходного напряжения 0–100 В.
7.Ручкой «плавно» добиться устойчивой картины переменного сигнала и

72
зарисовать его. Проделать пункты 5 – 7 при оглавлении «10». 8. Выключить источник питания.
В. Снятие чувствительности осциллографа.
1.Переключить провода с клемм «6,3 В» на клеммы вольтметра.
2.Включить источник питания тумблером «Вкл.» (рукоятка выходного напряжения должна быть на нуле).
3.Включить развёртку (клавиша «Вх.Х» утоплена), включить усиление клавишей «30» и при необходимости подрегулировать пятно в центр.
4.Меняя напряжение рукояткой 0–100 В (его значения устанавливаются по вольтметру например, 10 В, 20 В,...,100 В), измеряют на экране величину смещения лyчa – одно деление шкалы осциллографа – 1 мм.
5.По окончании измерений выключают источник питания и осциллограф, и отсоединяют их от сети.
6.Данные для десяти значений U – (от нуля до максимального отклонения луча) заносят в таблицу.
U
Y
7. Строят график зависимости y = f (U ) |
и по |
нему определяют |
чувствительность трубки h как тангенс угла наклона графика.
8. Сравнивают полученное значение с рассчитанным по формуле (7).
Контрольные вопросы
1.В чем состоит принцип независимости движений?
2.Сформулируйте условие сохранения проекции вектора импульса на данную координатную ось.
3.Какова траектория движения электронов до конденсатора, в конденсаторе
ипосле него?
4.Что из себя представляет кривая зависимости y = f (U ) ?
5.Какова схема электронно-лучевой трубки?
6.Каков характер движения электронов в конденсаторе?
7.Чем определяется точность Ваших измерений?
73
РАБОТА 13 а ИЗУЧЕНИЕ ДВИЖЕНИЯ МАЯТНИКА МАКСВЕЛЛА.
(Сложное движение твёрдого тела)
Приборы и принадлежности: маятник Максвелла, секундомер, штангенциркуль, линейка.
Введение. Маятник Максвелла представляет собой диск радиуса R и массой m, через ось которого проходит стержень значительно меньшего радиуса r (R >> r). Маятник подвешен на двух нитях, нижние концы которых закреплены на стержне, верхние – на неподвижном подвесе. Ось диска и стержня расположена горизонтально. На оба конца стержня наматываются нити, и маятник из нижней точки траектории (полностью размотанные нити) перемещается в верхнюю, на высоту h. Потенциальная энергия маятника при этом равна Wп = mgh . Когда
маятник отпускают, он начинает двигаться вниз, одновременно вращаясь вокруг оси, проходящей через центр масс маятника. Линейная скорость какой-
либо точки маятника |
V |
с радиусом-вектором r |
(начало полярной системы |
|
координат совпадает |
с |
осью маятника) может |
быть представлена в |
виде |
V =V C + [ω r ], где V C – скорость поступательного движения центра масс; |
ω – |
|||
угловая скорость вращения маятника вокруг своей оси. При движении маятника потенциальная энергия переходит в кинетическую энергию поступательного
движения центра |
масс mV C2 и кинетическую |
энергию |
вращения вокруг оси, |
||
проходящей через |
2 |
|
2 |
, где |
IС — момент инерции |
центр масс маятника, |
|
||||
|
|
I |
Cω2 |
|
|
маятника. В крайней нижней точке, когда нити полностью размотаны, происходит рывок; импульс поступательного движения mV C меняет своё
направление на противоположное. Для абсолютно упругих нитей кинетическая энергия поступательного движения центра масс при этом сохраняется (здесь уместна аналогия с упругим соударением тела о поверхность). Вращение, продолжаясь по инерции, вновь приводит к наматыванию нитей на стержень, вследствие чего маятник поднимается. Кинетическая энергия вновь переходит в потенциальную. Поступательное движение центра масс маятника определяется
уравнением: ma = mg − 2T , где T – сила натяжения каждой нити. Вращательное – уравнением: I C ε = 2[r T ] , где ε – угловое ускорение , при этом a =[ε r ] .
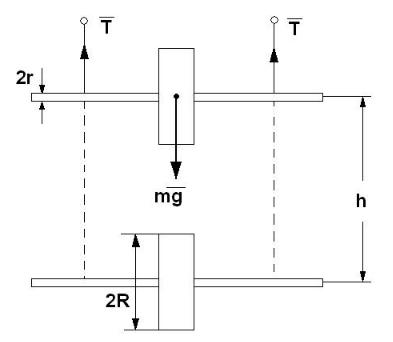
Описание установки и метода измерений. Установка состоит из маятника Максвелла, подвешенного на нитях (рис. 1). Верхние концы нитей закреплены на подвесе. Конструкция крепления допускает перемещение в небольших пределах точек фиксации каждой нити. Последнее необходимо для юстировки оси маятника в горизонтальной плоскости. Перед проведением измерений нити аккуратно, виток к витку, наматывают на стержень (от концов стержня к диску). После того, как маятник освобождён, он приходит в движение: поступательное в вертикальном направлении и вращательное вокруг своей оси. Уравнения движения маятника без учёта сил трения имеют вид:
74 |
|
ma = mg − 2T , |
(1) |
I C ε = 2[r T ], |
(2) |
a =[ε r ] |
(3) |
Из уравнений (1)-(3) следует
I C = m (g − a) r2 |
(4) |
a |
|
рис. 1
Движение центра масс маятника вниз – равноускоренное, что следует из уравнения (1). Величина ускорения поступательного движения равна
a = |
2S |
, |
(5) |
|
|||
|
t 2 |
|
|
где S – пройденное расстояние; t – время.
Определяя ускорение a путём измерения S, t и используя уравнение (4), определяют момент инерции маятника Максвелла.
Работа против сил трения движущихся поверхностей маятника о воздух, а также работа по деформации нитей обусловливают убыль энергии в системе. Вследствие этого при каждом последующем подъёме маятник поднимается на меньшую высоту hi+1 , нежели в предыдущем – hi ; hi+1 < hi . Разность
потенциальной энергии маятника в верхних точках движения маятника определяет убыль полной энергии в колебательной системе за период (т.е.
75
время спуска и последующего подъёма) – mg(hi − hi+1 ) . Мерой изменения
энергии в колебательной системе служит добротность Q, равная произведению 2π на отношение энергии W(t) колебательной системы в некоторый момент времени t к убыли энергии за период τ:
Q = 2π |
W (t) |
W (t) −W (t +τ) |
Для маятника Максвелла τ – интервал времени, необходимый для возвращения маятника в крайнее верхнее положение, т.е.
Q = 2π |
mghi |
= 2π |
hi |
(6) |
|
mg∆h |
∆h |
||||
|
|
|
|||
|
i |
|
i |
|
Порядок выполнения работы
1.Ускорение поступательного движения (вниз) центра масс маятника определяют по измерению времени, за которое стержень маятника опустится на известное расстояние S, которое отмечают по мерной линейке. Время опускания измеряют секундомером не менее 6-7 раз. Затем определяют среднее арифметическое значение этой величины. Значение ускорения поступательного движения находится по формуле (5).
2.Момент инерции маятника определяется по формуле (4). Радиус стержня r определяется с учётом плотно намотанных нитей подвески.
3.Рассчитывается величина момента инерции маятника. Диаметр диска определяется штангенциркулем. Расчётное значение момента инерции сравнивается с экспериментальным.
4.Измеряется расстояние между крайними верхней и нижней точками траектории движения маятника, после чего определяют полную энергию колебательной системы.
5.Определяют убыль энергии в системе за период колебания, с этой целью измеряют расстояние между двумя крайними верхними точками траектории
движения маятника – |
|
hi. |
|
|
|
|
|
||
6. По формуле (6) определяют добротность колебательной системы. |
|
|
|||||||
7. Данные измерений заносят в таблицу. |
|
|
|
||||||
S= |
|
|
|
|
|
|
r= |
|
|
№ |
t |
t 2 |
a |
I C |
∆ I C |
h |
Wполн. ∆h ∆Wполн. |
Q |
∆Q |
1
2
3
4
5
6
7