

14.5. Статические характеристики электропривода с замкнутой по скорости системой управления
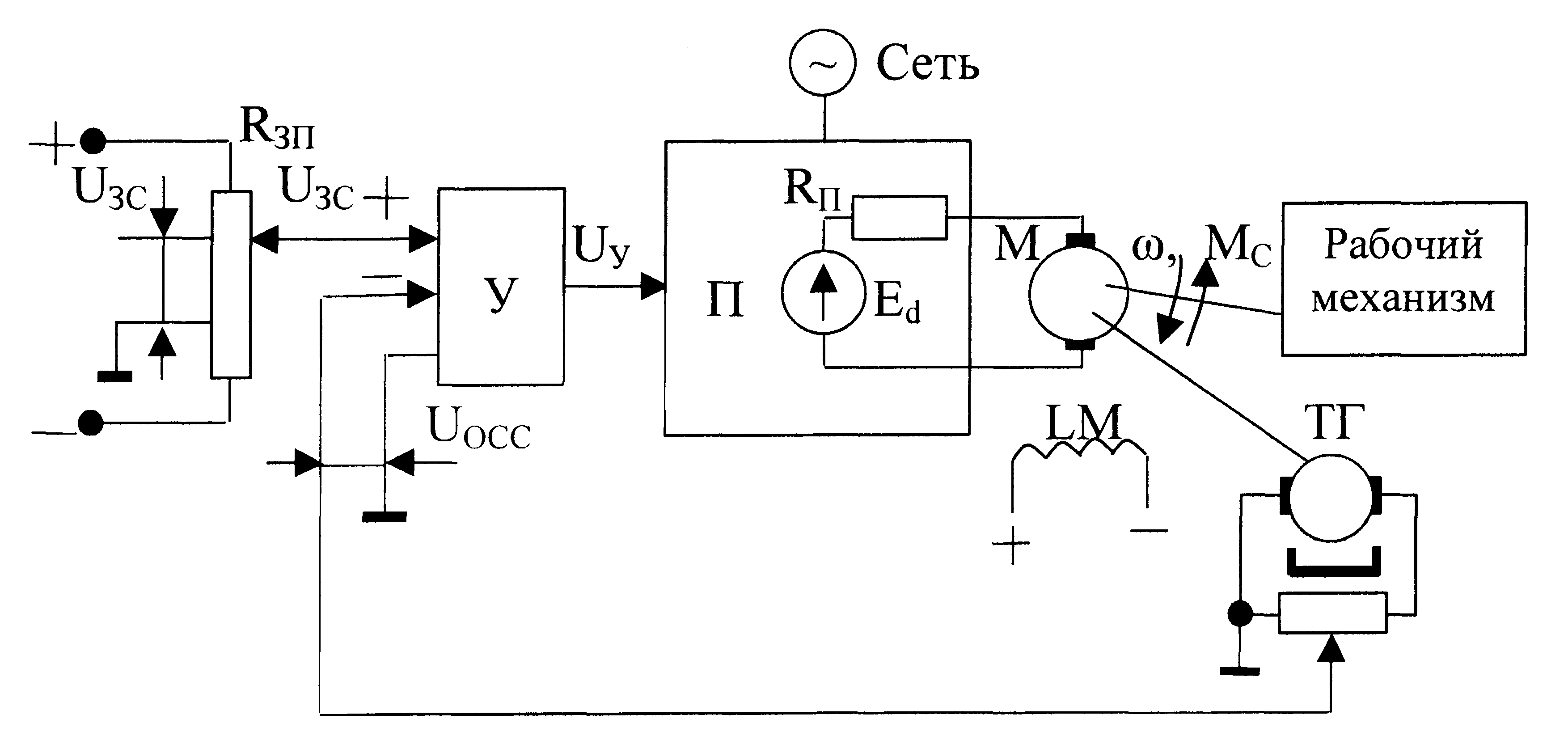
Функциональная схема электропривода постоянного тока по системе ТП-Д с обратной связью по скорости приведена на рис.14.7. Уравнение механических характеристик для этой системы по аналогии с (6.11) будет:
![]() , (14.1)
, (14.1)
где: ω0з – скорость холостого хода в замкнутой системе регулирования;
βзамк – жесткость механических характеристик в замкнутой системе управления;
 Ed
– э.д.с.
преобразователя, питающего якорную
цепь двигателя.
Ed
– э.д.с.
преобразователя, питающего якорную
цепь двигателя.
К
Рис.14.7.
Функциональная схема системы ТП-Д с
отрицательной обратной связью по
скорости
![]() . (14.2)
. (14.2)
Здесь: ку – коэффициент усиления усилителя;
![]() - коэффициент
усиления преобразователя;
- коэффициент
усиления преобразователя;
![]() - коэффициент
обратной связи по скорости;
- коэффициент
обратной связи по скорости;
С=кФ – машинная постоянная (см.6.6).
Электропривод по рассматриваемой схеме описывается следующей системой уравнений
 (14.3)
(14.3)
Решая уравнения (14.1) и (14.3) с учетом (14.2) относительно ω получим выражение для механических характеристик привода в замкнутой системе
![]() . (14.4)
. (14.4)
Механические
характеристики и принцип их формирования
в замкнутой по скорости системе управления
представлена на рис.5.5. Из (14.4) следует,
что для увеличения жесткости механических
характеристик нужно увеличивать
коэффициент усиления К,
что может достигаться увеличением
коэффициента усилителя ку.
При
![]() механические характеристики привода
будут абсолютно жесткими
механические характеристики привода
будут абсолютно жесткими![]() и их уравнение будет
и их уравнение будет![]() .
.
П ри
конечных значенияхку=var
жесткость механических характеристик
замкнутой системы будет определяться
величиной
ри
конечных значенияхку=var
жесткость механических характеристик
замкнутой системы будет определяться
величиной
![]() .
.
О
Рис.14.8.
Функциональная схема системы ТП-Д с
отрицательной обратной связью по
скорости и отсечкой по току
![]() если
если
![]()
![]() , если
, если
![]() . (14.5)
. (14.5)
Iотс – ток якоря, при превышении которого вступает в действие отрицательная обратная связь по току.
В Рис.14.9.
Механические характеристики системы
ТП-Д с отрицательной обратной связью
по скорости и отсечкой по току
 (14.6)
(14.6)
В результате решения этой системы уравнений относительно ω с учетом (14.2) получим уравнение механической характеристики для второго участка
![]() . (14.7)
. (14.7)
Первые два слагаемых уравнения (14.7) определяют скорость идеального холостого хода механической характеристики для второго участка
![]() .
.
Жесткость механической характеристики на втором участке будет
![]() .
.
Если
![]() ,
то жесткость механической характеристик
на втором участке будет
,
то жесткость механической характеристик
на втором участке будет![]() ,
т.е. предельная жесткость механической
характеристики зависит от соотношения
коэффициентов обратных связейкт
и кс.
,
т.е. предельная жесткость механической
характеристики зависит от соотношения
коэффициентов обратных связейкт
и кс.
Э.д.с. преобразователя Ed при работе двигателя с замкнутой системой управления не остается постоянной, а изменяется в соответствии с уравнением
![]() .
.
На рабочем участке
механической характеристики скорость
примерно постоянна. С увеличением
нагрузки на валу двигателя Ed
возрастает, как показано на рис.14.9. После
перехода на второй участок скорость
снижается до нуля, наступает режим
стопорения и Ed
уменьшается до величины
![]() .
.
Таким образом, для формирования желаемой механической характеристики преобразователь должен иметь необходимый запас по величине Ed в соответствии с соотношением
![]() .
.
В этой случае жесткость верхней механической характеристики βзамк1 будет постоянной при всех нагрузках вплоть до Мотс.