

2.6. Динамические характеристики механической системы с подвешенным грузом
Н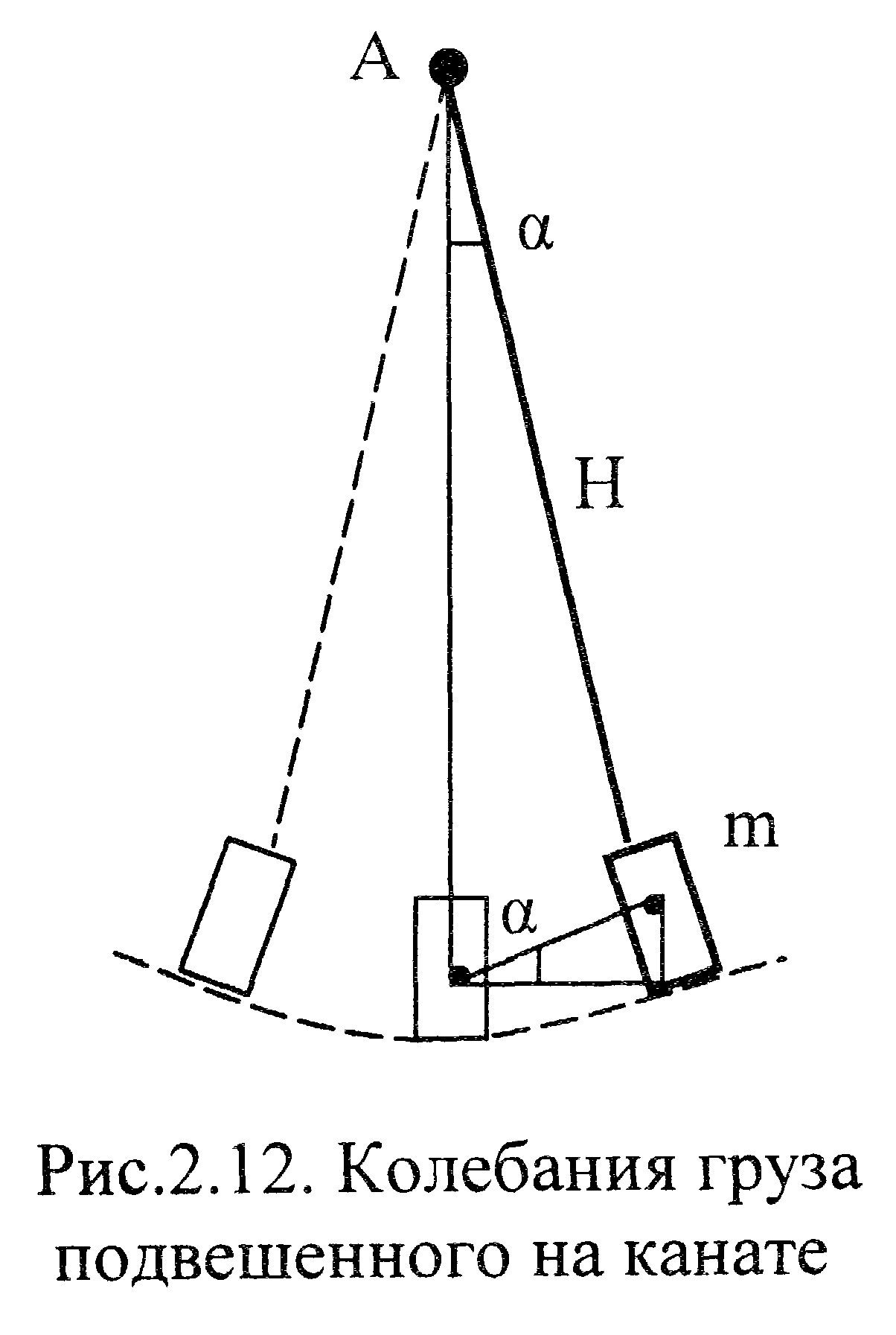 еобходимость
рассмотрения механической системы как
двухмассовой может возникнуть не только
при наличии в кинематической схеме
упругих элементов, но и в том случае,
когда механическая система включает в
себя груз, подвешенный на канате.
Рассмотрим такую систему на примере
механизма поворота башен-ного крана.
Груз массойm
(рис.2.12) подвешен через шкив А
на канате длиной Н.
Стрела крана длиной R
вращается в горизонтальной плос-кости.
При разгоне стрелы груз будет отставать
от вращательного движения стрелы, при
замедлении – опережать стрелу. При
равномерном движении стрелы груз будет
совершать коле-бательные движения. При
останове стрелы груз будет раскачиваться,
что неблагоприятно сказывается на
управлении краном. Во избежание этого
явления в системе управления приводом
поворота крана предусматриваются
специальные меры (см.главу 27).
еобходимость
рассмотрения механической системы как
двухмассовой может возникнуть не только
при наличии в кинематической схеме
упругих элементов, но и в том случае,
когда механическая система включает в
себя груз, подвешенный на канате.
Рассмотрим такую систему на примере
механизма поворота башен-ного крана.
Груз массойm
(рис.2.12) подвешен через шкив А
на канате длиной Н.
Стрела крана длиной R
вращается в горизонтальной плос-кости.
При разгоне стрелы груз будет отставать
от вращательного движения стрелы, при
замедлении – опережать стрелу. При
равномерном движении стрелы груз будет
совершать коле-бательные движения. При
останове стрелы груз будет раскачиваться,
что неблагоприятно сказывается на
управлении краном. Во избежание этого
явления в системе управления приводом
поворота крана предусматриваются
специальные меры (см.главу 27).
Для описания движения механической системы, показанной на рис.2.12, воспользуемся методом, изложенным в предыдущем параграфе.
Функция Лагранжа для данной системы будет
![]()
Здесь
![]() - момент инерции крана,
- момент инерции крана,
![]() -
угловая скорость вращения стрелы крана,
-
угловая скорость вращения стрелы крана,
![]() - угловая скорость
колебаний каната относительно точки
А,
- угловая скорость
колебаний каната относительно точки
А,
![]() - линейная скорость
груза (касательная по отношению к
окружности его вращения).
- линейная скорость
груза (касательная по отношению к
окружности его вращения).
Полагая
![]() ,
найдем
,
найдем
![]() (2.30)
(2.30)
Так как груз совершает движение в двух координатах: вращательное относительно вертикальной оси крана и колебательное относительно вертикальной линии отвеса каната, то нужно составить два уравнения Лагранжа для каждой из координат.
Найдя частные производные:
![]()
и подставив их в уравнение (2.21) получим систему из двух дифференциальных уравнений, описывающих движение груза.
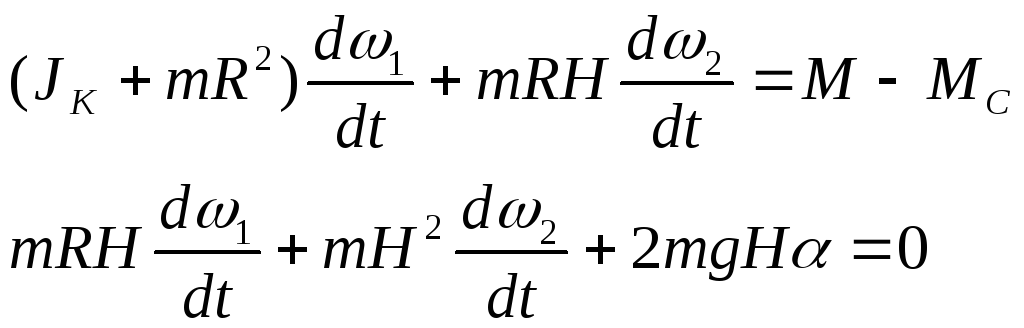 (2.31)
(2.31)
Здесь М – момент на валу механизма поворота стрелы;
МС- момент сопротивления движению стрелы.
Поскольку
![]() ,
то, решив систему (2.31) относительноα,
получим
,
то, решив систему (2.31) относительноα,
получим
![]() (2.32)
(2.32)
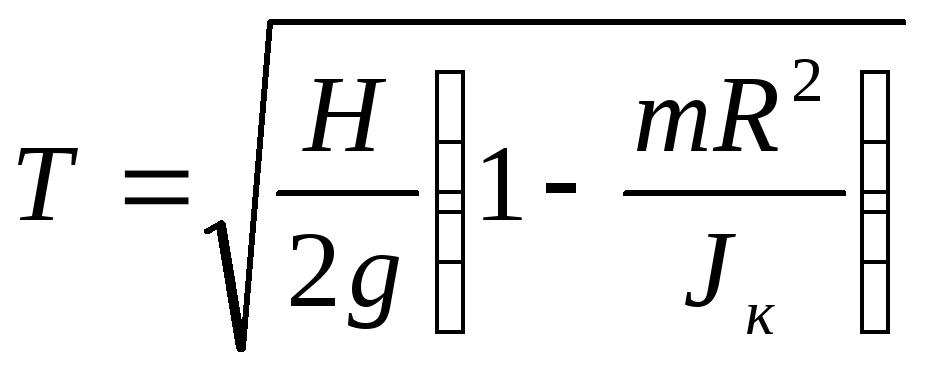 -
период колебаний груза, подвешенного
на канате.
-
период колебаний груза, подвешенного
на канате.