

-
Как определяется модуль и направление скорость точки при координатном способе задания движения?
![]() ,
,
![]() ,
,
![]() Таким образом, проекции скорости на
неподвижные декартовы оси координат
равны первым производным по времени от
соответствующих координат движущейся
точки. Из равенств следует, что проекции
скорости точки на координатные оси
равны скорости проекций этой точки на
те же оси. Зная проекции вектора скорости
точки, найдём его модуль:
Таким образом, проекции скорости на
неподвижные декартовы оси координат
равны первым производным по времени от
соответствующих координат движущейся
точки. Из равенств следует, что проекции
скорости точки на координатные оси
равны скорости проекций этой точки на
те же оси. Зная проекции вектора скорости
точки, найдём его модуль:
![]() .
.
Для определения направления вектора скорости воспользуемся направляющими косинусами:
![]() ,
,
![]() ,
,
![]() .
.
-
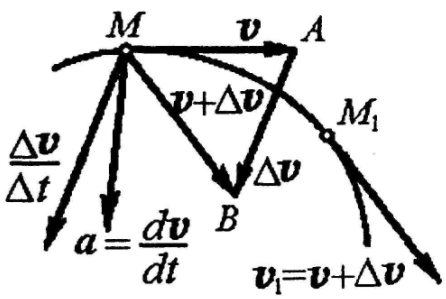
Какая зависимость существует между радиус-вектором движущейся точки и вектором ускорения точки? Как направлен вектор ускорения криволинейного движения точки по отношению к её траектории, в какой плоскости он лежит?
![]()
 ,
при стремлении
,
при стремлении
![]() к нулю получаем следующий предел:
к нулю получаем следующий предел:
![]() ,
этот предел называют ускорение точки
в данный момент времени. Так как вектор
скорости есть первая производная
радиус-вектора точки по времени, то:
,
этот предел называют ускорение точки
в данный момент времени. Так как вектор
скорости есть первая производная
радиус-вектора точки по времени, то:
![]() .
Таким образом, ускорение точки в данный
момент времени, есть векторная величина,
равная первой производной от вектора
скорости или второй производной от
радиус-вектора по времени.
.
Таким образом, ускорение точки в данный
момент времени, есть векторная величина,
равная первой производной от вектора
скорости или второй производной от
радиус-вектора по времени.
Установим теперь положение вектора
![]() относительно траектории. Отметим, что
плоскость треугольника МАВ, образованного
векторами
относительно траектории. Отметим, что
плоскость треугольника МАВ, образованного
векторами
![]() ,
,
![]() и
и
![]() ,
при
,
при
![]() будет поворачиваться вокруг вектора
будет поворачиваться вокруг вектора
![]() ,
т.е. вокруг касательной к траектории в
точке М, и займёт в пределе определённое
предельной положение. Это предельное
положение плоскости МАВ называется
соприкасающейся плоскостью в точке М
траектории. Вектор среднего ускорения
,
т.е. вокруг касательной к траектории в
точке М, и займёт в пределе определённое
предельной положение. Это предельное
положение плоскости МАВ называется
соприкасающейся плоскостью в точке М
траектории. Вектор среднего ускорения
![]() направлен так же, как и
направлен так же, как и
![]() ,
т.е. в сторону вогнутости кривой, и всё
время находиться в плоскости треугольника
МАВ. Предел вектора
,
т.е. в сторону вогнутости кривой, и всё
время находиться в плоскости треугольника
МАВ. Предел вектора
![]() при
при
![]() есть вектор
есть вектор
![]() ,
который расположен в предельном положении
треугольника МАВ, т.е. в соприкасающейся
плоскости траектории точки М. Итак,
вектор полного ускорения точки находиться
в соприкасающейся плоскости траектории
точки М направлен в сторону вогнутости
траектории.
,
который расположен в предельном положении
треугольника МАВ, т.е. в соприкасающейся
плоскости траектории точки М. Итак,
вектор полного ускорения точки находиться
в соприкасающейся плоскости траектории
точки М направлен в сторону вогнутости
траектории.
-
Как определяется модуль и ускорение точки при координатном способе задания движения?
Разложим радиус вектор
![]() по ортам декартовой системы координат:
по ортам декартовой системы координат:
![]() .
Теперь дважды дифференцируем равенство
по времени. В результате получим
разложение ускорения по ортам i,
j, k:
.
Теперь дважды дифференцируем равенство
по времени. В результате получим
разложение ускорения по ортам i,
j, k:
![]() ,
разложение можно представить так:
,
разложение можно представить так:
![]() ,
где
,
где
![]() ,
,
![]() ,
,
![]() - проекции вектора ускорения на оси
координат. То есть, проекции вектора
ускорения на неподвижные оси координат
равны первым производным по времени от
соответствующих проекций вектора
скорости или вторым производным от
соответствующих координат точки. По
этим проекциям определяем величину
вектора ускорения:
- проекции вектора ускорения на оси
координат. То есть, проекции вектора
ускорения на неподвижные оси координат
равны первым производным по времени от
соответствующих проекций вектора
скорости или вторым производным от
соответствующих координат точки. По
этим проекциям определяем величину
вектора ускорения:
![]() .
.
-
Какие оси называются естественными осями? Дайте из определения и приведите соответствующий рисунок.
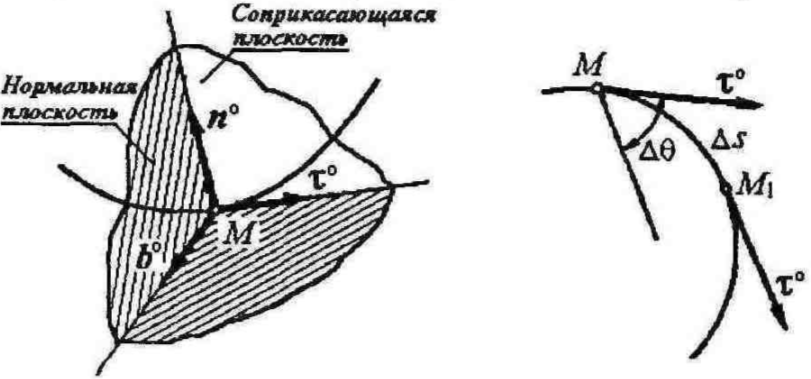
Единичный вектор касательной -
![]() ,
нормали -
,
нормали -
![]() ,
бинормали -
,
бинормали -
![]() .
Через эти векторы проходят плоскости:
(
.
Через эти векторы проходят плоскости:
(![]() ,
,
![]() )
– соприкасающаяся, (
)
– соприкасающаяся, (![]() ,
,![]() )
– нормальная, (
)
– нормальная, (![]() ,
,![]() )
– спрямляющая. Три взаимно перпендикулярных
направления, которые определяются
векторам
)
– спрямляющая. Три взаимно перпендикулярных
направления, которые определяются
векторам
![]() ,
,
![]() ,
,
![]() ,
образуют естественную систему координат,
или так называемый естественный
(подвижный) трёхгранник. Оси этой системы
координат называются естественными
осями (касательная, нормаль, бинормаль).
,
образуют естественную систему координат,
или так называемый естественный
(подвижный) трёхгранник. Оси этой системы
координат называются естественными
осями (касательная, нормаль, бинормаль).
- Единичный вектор
![]() всегда направлен в сторону вогнутости
кривой.
всегда направлен в сторону вогнутости
кривой.
- Предельное положение секущей, проходящей
через две точки кривой M
и
![]() ,
когда
,
когда
![]() стремиться к M, называется
касательной к кривой в точке M.
Единичным вектором этой касательной
является вектор
стремиться к M, называется
касательной к кривой в точке M.
Единичным вектором этой касательной
является вектор
![]() .
Плоскость, образованная взаимно
перпендикулярными векторами
.
Плоскость, образованная взаимно
перпендикулярными векторами
![]() и
и
![]() называется соприкасающейся.
называется соприкасающейся.
- Единичный вектор нормали
![]() всегда направлен в сторону вогнутости
кривой, а геометрическое место нормалей
к данной кривой называют нормальной
плоскостью.
всегда направлен в сторону вогнутости
кривой, а геометрическое место нормалей
к данной кривой называют нормальной
плоскостью.