

Лекция №12.
Группы соединений трёхфазных трансформаторов.
Соединение типа «звезда-звезда»:
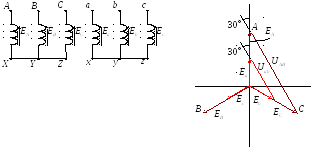
Соединение типа «звезда-треугольник»:
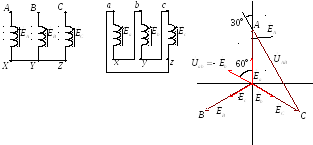
Минутная стрелка считается установленной на 12 часов, и с ней совмещается вектор линейного высшего напряжения, а часовая стрелка совмещается с вектором линейного низшего напряжения.
Группе соединений
даётся название по часовой стрелке:
первое соединение обозначается
![]() ;
второе соединение обозначается
;
второе соединение обозначается![]() .
ГОСТ ограничивает число схем и групп
соединений следующими схемами и группами:
.
ГОСТ ограничивает число схем и групп
соединений следующими схемами и группами:![]() ,
где
,
где![]() означает, что наружу выводится нулевая
точка обмотки;
означает, что наружу выводится нулевая
точка обмотки;![]() ;
;![]() ;
;![]() ,
а также «звезда-зигзаг-11».
,
а также «звезда-зигзаг-11».
Соединение зигзагом используются в специальных случаях, когда возможна неравномерная нагрузка фаз с наличием токов нулевой последовательности.
Вращающееся магнитное поле.
Виток катушки с током в разрезе:
Т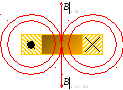 ок,
проходящий по катушке, является
синусоидальным
ок,
проходящий по катушке, является
синусоидальным![]() .
.
Магнитное поле
характеризуется вектором магнитной
индукции
![]() .
Направление вектора магнитной индукции
.
Направление вектора магнитной индукции![]() определяется направлением намотки
катушки и направлением тока в ней в
данный момент времени. Если ток входит
в начало, а выходит из конца (пусть этому
соответствует интервал времени
определяется направлением намотки
катушки и направлением тока в ней в
данный момент времени. Если ток входит
в начало, а выходит из конца (пусть этому
соответствует интервал времени![]() ),
то результирующий вектор
),
то результирующий вектор![]() направлен вверх. В следующий полупериод
(
направлен вверх. В следующий полупериод
(![]() )
ток отрицателен, то есть входит в конец
катушки и выходи из начала, а вектор
магнитной индукции
)
ток отрицателен, то есть входит в конец
катушки и выходи из начала, а вектор
магнитной индукции![]() направлен вниз. Получается пульсирующее
магнитное поле. Геометрическим местом
точек концов вектора магнитной индукции
направлен вниз. Получается пульсирующее
магнитное поле. Геометрическим местом
точек концов вектора магнитной индукции![]() является ось катушки.
является ось катушки.
П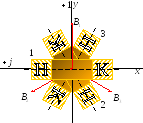 олучение
кругового вращающегося магнитного
поля.
олучение
кругового вращающегося магнитного
поля.
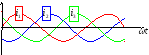
Расположим три
одинаковые катушки так, чтобы из оси
были смещены на
![]() относительно друг друга, и подключим
катушки к симметричной трёхфазной
системе ЭДС. Токи, входящие в начала
катушек изменяются следующим образом:
относительно друг друга, и подключим
катушки к симметричной трёхфазной
системе ЭДС. Токи, входящие в начала
катушек изменяются следующим образом:
![]() ;
;
![]() ;
;
![]() .
.
Каждый ток создаёт пульсирующее магнитное поле:
![]()
 ;
;
![]() ;
;
![]() .
.
Спроектируем
векторы
![]() ,
,![]() и
и![]() на оси
на оси![]() и
и![]() и запишем алгебраическую сумму проекции
векторов. В результате получим:
и запишем алгебраическую сумму проекции
векторов. В результате получим:![]() ,
где
,
где![]() и
и![]() - сумма проекций векторов на оси
- сумма проекций векторов на оси![]() и
и![]() .
Следовательно, геометрическим местом
концов вектора магнит
.
Следовательно, геометрическим местом
концов вектора магнит ной
индукции
ной
индукции![]() является окружность радиусом
является окружность радиусом![]() .
.
![]() .
.
С увеличением
времени
![]() вектор магнитной индукции
вектор магнитной индукции![]() вращается с угловой скоростью
вращается с угловой скоростью![]() в сторону катушки с отстающим по фазе
током.
в сторону катушки с отстающим по фазе
током.
Если ток
![]() пропустить по третьей катушке, а ток
пропустить по третьей катушке, а ток![]() по второй, то направление вращения поля
изменится на противоположенное.
по второй, то направление вращения поля
изменится на противоположенное.
Если произойдёт
обрыв одной из фаз или токи в фазах по
амплитуде будут не равны или сдвинуты
не на
![]() ,
то образуется эллиптическое вращающееся
поле.
,
то образуется эллиптическое вращающееся
поле.
Это явление, то есть возможность получения вращающегося поля, используется в электрических двигателях.
Принцип действия асинхронного двигателя.
Принцип действия асинхронного двигателя рассмотрим на модели:
Д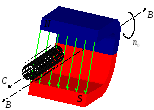 вухполюсный
магнит вращается с постоянной скоростью
вухполюсный
магнит вращается с постоянной скоростью![]() вокруг оси
вокруг оси![]() .
.
Между полюсами
магнита на оси
![]() помещён ротор, который выполнен из
проводящих стержней по типу беличьей
клетки.
помещён ротор, который выполнен из
проводящих стержней по типу беличьей
клетки.
Рассмотрим
направление вращения ротора. Для этого
возьмём один стержень. Пусть поле
неподвижно, а относительно поля движется
стержень ротора. Определим направление
индуцированной ЭДС по правилу правой
руки. Если обмотка замкнута, то по ней
потечёт ток того же направления. По
правилу левой руки находим направление
силы, действующей на проводник. Под
действием этой силы ротор начинает
вращаться в ту же сторону, в которую
вращается магнитное поле статора, но
со скоростью
![]() .
По мере возрастания скорости вращения
ротора
.
По мере возрастания скорости вращения
ротора![]() уменьшается относительная скорость
движения стержней в магнитном поле,
поэтому индуцированная ЭДС постепенно
убывает, а значит, уменьшается и ток,
текущий по стержням, и силы, действующие
на стержни. При некоторой скорости
вращения ротора
уменьшается относительная скорость
движения стержней в магнитном поле,
поэтому индуцированная ЭДС постепенно
убывает, а значит, уменьшается и ток,
текущий по стержням, и силы, действующие
на стержни. При некоторой скорости
вращения ротора![]() ,
меньшей
,
меньшей![]() наступает равновесие между вращающим
моментам
наступает равновесие между вращающим
моментам![]() и моментом сопротивления
и моментом сопротивления![]() ,
то есть
,
то есть![]() .
Момент сопротивления
.
Момент сопротивления![]() обусловлен трением оси ротора в
подшипниках и трением стержней ротора
о воздух.
обусловлен трением оси ротора в
подшипниках и трением стержней ротора
о воздух.
Допустим, к оси
ротора приложили дополнительно внешний
момент сопротивления, тогда равновесие
нарушится, и скорость вращения ротора
уменьшится, что приведёт к увеличению
разности скоростей, то есть увеличится
скорость пересечения проводниками
линий магнитного поля. Это приводит к
росту индуцируемых ЭДС, а, следовательно,
и токов в обмотках, что приведёт к
увеличению сил, действующих на проводники
с током. В результате возрастёт вращающий
момент, и при некоторой новой скорости
![]() опять установится равновесие
опять установится равновесие![]() .
Следовательно, каждому моменту
сопротивления
.
Следовательно, каждому моменту
сопротивления![]() соответствует определённая скорость
вращения ротора. Момент сопротивления
соответствует определённая скорость
вращения ротора. Момент сопротивления![]() не может снизиться до нуля, поэтому
скорость вращения ротора, поэтому
скорость вращения ротора
не может снизиться до нуля, поэтому
скорость вращения ротора, поэтому
скорость вращения ротора![]() не может снизиться до скорости
не может снизиться до скорости![]() .
Более того, наведение токов в роторе и
возникновение сил, создающих вращающий
момент (явление ЭДС индукции) возможно
только при выполнении условия
.
Более того, наведение токов в роторе и
возникновение сил, создающих вращающий
момент (явление ЭДС индукции) возможно
только при выполнении условия![]() .
.
Так как
![]() ,
двигатель, основанный на этом принципе,
называется асинхронным. Степень
отставания скорости вращения ротора
от скорости вращения магнитного поля
оценивается величиной скольжения
,
двигатель, основанный на этом принципе,
называется асинхронным. Степень
отставания скорости вращения ротора
от скорости вращения магнитного поля
оценивается величиной скольжения![]() .
.
В реальных двигателях
вращающееся магнитное поле создаётся
катушками трёхфазного тока. Обычно
реальный двигатель рассчитан на работу
от сети с частотой
![]() .
.
Устройство асинхронного двигателя.
Асинхронный двигатель состоит из неподвижного статор и подвижного ротора.
Статор состоит из чугунного или стального корпуса, внутри которого помещён полый цилиндр – сердечник статора. Он собран из штампованных листов электротехнической стали, которые изолированы друг от друга слоем лака. На внутренней стороне цилиндра или сердечника имеются пазы, в которых размещается обмотка статора, которая питается от цепи трёхфазного тока. В результате этого внутри цилиндра образуется вращающееся магнитное поле.
Ч тобы
лучше использовать окружность статора,
каждая фаза обмотки располагается в
нескольких пазах (распределённая
обмотка).
тобы
лучше использовать окружность статора,
каждая фаза обмотки располагается в
нескольких пазах (распределённая
обмотка).
Внутри статора расположен ротор – стальной вал, на который напрессован цилиндр из листов электротехнической стали. На внешней поверхности ротора есть пазы, в которых располагается обмотка ротора. Обмотка ротора не имеет электрической связи с питающей цепью.
В зависимости от типа обмотки ротора асинхронные двигатели делятся на следующие типы:
Асинхронные двигатели с короткозамкнутым ротором, у которых обмотка выполнена в виде беличьей клетки, то есть в пазы ротора уложены стержни из меди или алюминия, а концы стрежней по торцам соединены кольцами из того же материала.
Асинхронные двигатели с фазным ротором, у которых ротор имеет трёхфазную обмотку, аналогичную обмотке статора. Катушки трёх фаз соединены звездой, а три свободных конца обмотки соединяются с тремя контактными кольцами, размещёнными на валу ротора, при этом кольца изолированы друг от друга и от вала. К кольцам прилегают неподвижные щётки, которые соединены с внешним трёхфазным реостатом.
В большинстве асинхронных двигателей применяется короткозамкнутый ротор, однако асинхронный двигатель с трёхфазным ротором даёт возможность существенно улучшить пусковые свойства двигателя и плавно регулировать скорость вращения двигателя.