

Лекция №16.
Когда момент
сопротивления
![]() ,
то в режиме идеального холостого хода
оси обеих магнитных систем совпадают.
,
то в режиме идеального холостого хода
оси обеих магнитных систем совпадают.
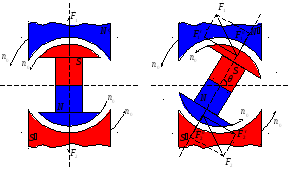
На полюса ротора
действуют радиальные силы
![]() и
и![]() ,
которые не создают ни вращающего момента,
ни момента сопротивления. Если к валу
двигателя приложить механическую
нагрузку, создающую момент сопротивления
,
которые не создают ни вращающего момента,
ни момента сопротивления. Если к валу
двигателя приложить механическую
нагрузку, создающую момент сопротивления![]() ,
то ось ротора сместиться назад относительно
оси полюсов вращающегося поля на угол,
который зависит от величины момента
сопротивления
,
то ось ротора сместиться назад относительно
оси полюсов вращающегося поля на угол,
который зависит от величины момента
сопротивления![]() .
.
На полюса ротора
![]() и
и![]() теперь будут действовать силы притяжения
теперь будут действовать силы притяжения![]() и
и![]() .
Тангенциальные составляющие этих сил,
то есть
.
Тангенциальные составляющие этих сил,
то есть![]() и
и![]() ,
создают вращающий момент
,
создают вращающий момент![]() ,
который равен моменту сопротивления
,
который равен моменту сопротивления![]() .
Вращающий момент
.
Вращающий момент![]() преодолевает вращающий момент механической
нагрузки. Ось магнитного потока ротора
отстаёт по фазе на угол
преодолевает вращающий момент механической
нагрузки. Ось магнитного потока ротора
отстаёт по фазе на угол![]() относительно положения, которое она
занимала при холостом ходе. Угол
относительно положения, которое она
занимала при холостом ходе. Угол![]() тем больше, чем значительней нагрузка
на валу двигателя, поэтому угол
тем больше, чем значительней нагрузка
на валу двигателя, поэтому угол![]() называется углом нагрузки. Существует
зависимость вращающего момента
развиваемого двигателям от угла нагрузки
называется углом нагрузки. Существует
зависимость вращающего момента
развиваемого двигателям от угла нагрузки![]() .
Эта зависимость при неизменном токе
возбуждения, то есть при неизменной
ЭДС, наводимой в обмотке якоря или
статора, называется угловой характеристикой
синхронного двигателя.
.
Эта зависимость при неизменном токе
возбуждения, то есть при неизменной
ЭДС, наводимой в обмотке якоря или
статора, называется угловой характеристикой
синхронного двигателя.
У стойчивая
работа синхронного двигателя возможна,
когда при увеличении момента сопротивления
стойчивая
работа синхронного двигателя возможна,
когда при увеличении момента сопротивления![]() ,
и соответствующем возрастании угла
,
и соответствующем возрастании угла![]() .
Электромагнитный вращающий момент
.
Электромагнитный вращающий момент![]() также увеличивается, то есть когда
также увеличивается, то есть когда![]() .
Таким образом, при изменении от
.
Таким образом, при изменении от![]() до
до![]() работа двигателя будет устойчивой.
работа двигателя будет устойчивой.
Если угол
![]() больше или равен
больше или равен![]() ,
то работа двигателя невозможна, так как
при этом увеличение механической
нагрузки на валу сопровождается
уменьшением вращающегося момента. Угол
,
то работа двигателя невозможна, так как
при этом увеличение механической
нагрузки на валу сопровождается
уменьшением вращающегося момента. Угол![]() обычно не превышает
обычно не превышает![]() при работе двигателя с номинальной
нагрузкой.
при работе двигателя с номинальной
нагрузкой.
Влияние тока возбуждения на работу двигателя.
При заданной
механической нагрузке синхронного
двигателя, то есть
![]() ,
потребляемая двигателем активная
мощность
,
потребляемая двигателем активная
мощность![]() практически постоянна, независимо от
величины тока возбуждения
практически постоянна, независимо от
величины тока возбуждения![]() .
Изменение тока
.
Изменение тока![]() в обмотке возбуждения вызывает изменение
магнитного потока возбуждения
в обмотке возбуждения вызывает изменение
магнитного потока возбуждения![]() и ЭДС индуцируемую в обмотке якоря
(статора)
и ЭДС индуцируемую в обмотке якоря
(статора)![]() .
При постоянной величине напряжения в
сети этот влечёт за собой изменение
потребляемого из сети тока
.
При постоянной величине напряжения в
сети этот влечёт за собой изменение
потребляемого из сети тока![]() ,
то есть тока статора. При этом меняются
,
то есть тока статора. При этом меняются![]() и угол
и угол![]() .
.
А нализ
векторной диаграммы показывает, что
ток, потребляемый двигателем, то есть
ток
нализ
векторной диаграммы показывает, что
ток, потребляемый двигателем, то есть
ток![]() ,
имеет минимальное значение при работе
с
,
имеет минимальное значение при работе
с![]() (реактивная мощность при этом равна
нулю). При уменьшение тока возбуждения
(реактивная мощность при этом равна
нулю). При уменьшение тока возбуждения![]() двигатель работает с индуктивным
двигатель работает с индуктивным![]() ,
потребляя из сети не только активную,
но и реактивную мощность. При увеличении
тока в обмотке возбуждения
,
потребляя из сети не только активную,
но и реактивную мощность. При увеличении
тока в обмотке возбуждения![]() двигатель работает с ёмкостным
двигатель работает с ёмкостным![]() ,
потребляя из сети активную мощность и
отдавая в сеть реактивную мощность. Для
каждой нагрузки синхронного двигателя
можно получить расчётным или опытным
путём зависимость величины потребляемого
тока
,
потребляя из сети активную мощность и
отдавая в сеть реактивную мощность. Для
каждой нагрузки синхронного двигателя
можно получить расчётным или опытным
путём зависимость величины потребляемого
тока![]() от тока в обмотке возбуждения
от тока в обмотке возбуждения![]() .
.
Эти зависимости
принято называть U-образными
характеристиками. Левые ветви характеристик
соответствуют индуктивному
![]() ,
а правые – ёмкостному
,
а правые – ёмкостному![]() .
Ток
.
Ток![]() ,
потребляемый синхронным двигателем от
сети, зависит от механической нагрузки
на валу двигателя и от величины тока в
обмотке возбуждения. Наиболее
распространённые на промышленных
предприятиях асинхронные двигатели
работают с индуктивным
,
потребляемый синхронным двигателем от
сети, зависит от механической нагрузки
на валу двигателя и от величины тока в
обмотке возбуждения. Наиболее
распространённые на промышленных
предприятиях асинхронные двигатели
работают с индуктивным![]() .
В этих условиях работа синхронным
двигателей с ёмкостным
.
В этих условиях работа синхронным
двигателей с ёмкостным![]() является экономически целесообразной,
так при этом общий
является экономически целесообразной,
так при этом общий![]() стремиться к единице и потребляемый из
сети ток уменьшается, а, следовательно,
растёт общий КПД.
стремиться к единице и потребляемый из
сети ток уменьшается, а, следовательно,
растёт общий КПД.
Пуск синхронного двигателя.
Использование
синхронных двигателей в промышленности
стало практически возможно только после
создания простой схемы асинхронного
пуска. Роторы помимо обмотки возбуждения
имеют пусковую коротко замкнутую обмотку
типа бельечьей клетки. Стержни пусковой
обмотки расположены в пазах полюсных
наконечников и соединены на торцах
пластины. Пуск происходит в следующем
порядке: обмотка возбуждения отключается
от возбудителя и замыкается на
сопротивление реостата; после этого
обмотка статора присоединяется к сети
трёхфазного тока; возникает вращающееся
магнитное поле, точно так же, как это
имеет место в асинхронном двигателе с
короткозамкнутым ротором; когда ротор
достигает скорости
![]() близкой к синхронной (
близкой к синхронной (![]() )
в обмотку возбуждения подают постоянный
ток от возбудителя и двигатель входит
в синхронизм. Для уменьшения пускового
тока мощных синхронных двигателей пуск
часто осуществляют с помощью
автотрансформатора при пониженном
напряжении. Синхронный двигатель
сохраняет неизменную скорость
)
в обмотку возбуждения подают постоянный
ток от возбудителя и двигатель входит
в синхронизм. Для уменьшения пускового
тока мощных синхронных двигателей пуск
часто осуществляют с помощью
автотрансформатора при пониженном
напряжении. Синхронный двигатель
сохраняет неизменную скорость![]() при всех допустимых значениях нагрузки,
поэтому механическая характеристика
выглядит так, как показано на рисунке.
при всех допустимых значениях нагрузки,
поэтому механическая характеристика
выглядит так, как показано на рисунке.
П реимущества:
реимущества:
Стабильность скорости вращения при различных нагрузках.
Меньшая, по сравнению с асинхронным двигателем, зависимость вращающего момента от напряжения сети.
Возможность работы с опережающим
 для повышения общего КПД.
для повышения общего КПД.
Недостатки:
Необходимость двух видов тока: постоянного и переменного.
Относительная сложность пуска.
Невозможность регулирования скорости (если исключить способ, основанные на изменении частоты
 ).
).Выпадение из синхронизма при значительных механических перегрузках.
Синхронные двигатели частот применяются в непрерывно действующих агрегатах относительно большой мощности (центробежные и поршневые насосы, вентилятора, компрессоры и так далее).
Выпрямление переменного напряжения.
Выпрямление переменного напряжения – процесс преобразования переменного напряжения в постоянное или пульсирующее.
Выпрямление производят с помощью выпрямителей. Не управляемый диод изображают на схемах в виде треугольной стрелки.
С
 трелка
показывает проводящее направление.
Сопротивление диода в проводящем
направлении в тысячи раз меньше, чем в
непроводящем. Изобразим вольтамперные
характеристики диода. Для облегчения
анализа пользуются идеализированной
вольтамперной характеристикой, то есть,
когда через диод идёт ток, падение
напряжения на диоде равно нулю,
следовательно, сопротивление диода
равно нулю. Когда напряжение на диоде
отрицательно, диод не проводит ток и
сопротивление его бесконечно велико.
Диод открывается, когда напряжение на
нём увеличиваясь становится равным
нулю, и закрывается, когда ток через
него уменьшаясь становится равным нулю.
трелка
показывает проводящее направление.
Сопротивление диода в проводящем
направлении в тысячи раз меньше, чем в
непроводящем. Изобразим вольтамперные
характеристики диода. Для облегчения
анализа пользуются идеализированной
вольтамперной характеристикой, то есть,
когда через диод идёт ток, падение
напряжения на диоде равно нулю,
следовательно, сопротивление диода
равно нулю. Когда напряжение на диоде
отрицательно, диод не проводит ток и
сопротивление его бесконечно велико.
Диод открывается, когда напряжение на
нём увеличиваясь становится равным
нулю, и закрывается, когда ток через
него уменьшаясь становится равным нулю.
Рассмотрим схему однополупериодного выпрямления.
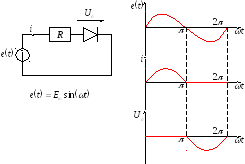
В основе решения
лежит второй закон Кирхгофа:
![]() .
Падение напряжения на диоде
.
Падение напряжения на диоде![]() и ток, текущий через диод,
и ток, текущий через диод,![]() друг друга исключают. Ток, текущий через
диод,
друг друга исключают. Ток, текущий через
диод,![]() равен нулю, только если величина ЭДС
положительна, то есть
равен нулю, только если величина ЭДС
положительна, то есть![]() (
(![]() ).
Если
).
Если![]() ,
то
,
то![]() .
Если величина ЭДС отрицательна, то есть
.
Если величина ЭДС отрицательна, то есть![]() (
(![]() ),
то ток, текущий через диод, равен нулю,
то есть
),
то ток, текущий через диод, равен нулю,
то есть![]() .
.
Схема двухполупериодного выпрямления.
Д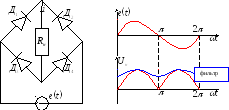
 иоды
работаю попарно: в первый полупериод
(от
иоды
работаю попарно: в первый полупериод
(от![]() до
до![]() )
ток течёт через диод
)
ток течёт через диод![]() ,
сопротивление нагрузки, диод
,
сопротивление нагрузки, диод![]() и замыкается в источник, при этом диоды
и замыкается в источник, при этом диоды![]() и
и![]() закрыты. Во второй полупериод (от
закрыты. Во второй полупериод (от![]() до
до![]() ),
когда ЭДС меняет знак, ток идёт через
диод
),
когда ЭДС меняет знак, ток идёт через
диод![]() ,
нагрузку, диод
,
нагрузку, диод![]() и возвращается в источник. Направление
тока в нагрузке не меняется. Для
сглаживания пульсаций этого напряжения
применяются электрические фильтры. При
этом используют законы коммутации,
заключающиеся в том, что напряжение на
ёмкости не может измениться скачком,
также как и ток через индуктивность.
Поэтому если последовательно с
сопротивлением нагрузки включить
индуктивность, а параллельно ёмкость,
то удаётся сгладить пульсацию напряжения.
и возвращается в источник. Направление
тока в нагрузке не меняется. Для
сглаживания пульсаций этого напряжения
применяются электрические фильтры. При
этом используют законы коммутации,
заключающиеся в том, что напряжение на
ёмкости не может измениться скачком,
также как и ток через индуктивность.
Поэтому если последовательно с
сопротивлением нагрузки включить
индуктивность, а параллельно ёмкость,
то удаётся сгладить пульсацию напряжения.
Электротехника и электроника