

Методика выполнения работы
Открыть программу
МВТУ, ярлык которой имеет вид![]() .
В меню выбрать «Файл»
→ «Открыть» → ТауЛр6.mrj.
.
В меню выбрать «Файл»
→ «Открыть» → ТауЛр6.mrj.
В каждом из вариантов исследуемых систем представить в отчете наиболее типичный для рассматриваемого случая процесс.
Получить вариант исходных данных у преподавателя. Данные по всем вариантам сведены в табл. 5. Установить параметры звеньев.
Таблица 5
|
Тип ЛАХ |
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 | |
|
I
|
1 |
Т1 |
0.02 |
0.013 |
0.015 |
0.016 |
0.018 |
0.011 |
0.017 |
|
Т2 |
0.01 |
0.017 |
0.015 |
0.014 |
0.012 |
0.019 |
0.013 | ||
|
2 |
Т1 |
1 |
0.5 |
0.8 |
1.1 |
0.7 |
0.6 |
0.9 | |
|
Т2 |
0.02 |
0.017 |
0.015 |
0.016 |
0.018 |
0.019 |
0.015 | ||
|
II |
|
Т1 |
0.02 |
0.013 |
0.015 |
0.016 |
0.018 |
0.011 |
0.017 |
|
III |
1 |
Т1 |
1 |
0.5 |
0.8 |
1.1 |
0.7 |
0.6 |
0.9 |
|
Т2 |
0.02 |
0.017 |
0.015 |
0.016 |
0.018 |
0.019 |
0.015 | ||
|
2 |
Т1 |
1 |
0.5 |
0.8 |
1.1 |
0.7 |
0.6 |
0.9 | |
|
Т2 |
0.04 |
0.045 |
0.03 |
0.035 |
0.05 |
0.04 |
0.03 | ||
|
3 |
Т1 |
0.02 |
0.013 |
0.015 |
0.016 |
0.018 |
0.011 |
0.017 | |
|
Т2 |
0.01 |
0.017 |
0.015 |
0.014 |
0.012 |
0.019 |
0.013 | ||
Рассчитать параметры регуляторов для заданных случаев. Звено передаточной функцией вида (14) в ПК МВТУ можно получить при помощи динамического звена общего вида
 ,
,
Рис. 15 Динамическое звено общего вида
При нулевых начальных условиях динамика блока может быть представлена следующей передаточной функцией вида (14).
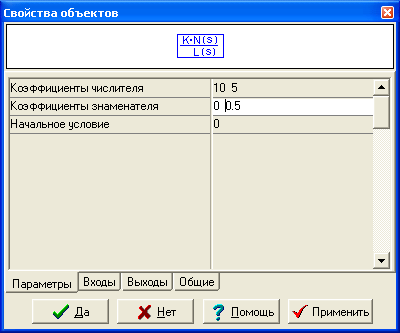
![]() Рис.
16 Диалоговое окно установки параметров
звена Общего вида».
Рис.
16 Диалоговое окно установки параметров
звена Общего вида».
В приведенном примере имеет место ПИ – регулятор с параметрами β=10, τ=0.5. При этом коэффициенты числителя а0= β=10, а1= β * τ =5 устанавливаются через пробел. Коэффициенты знаменателя b0=0, b1= τ=0.5 устанавливаются во второй строке также через пробел. Описание звена и установки его параметров можно получить, нажав кнопку «? Помощь».
Провести моделирование реакции системы с типом ЛАХ I.
При оформлении отчета ответить на вопрос: Возможно ли появление статической ошибки по управляющему воздействию? При ответе на вопрос указать причины её появления или отсутствия.
Провести моделирование реакции системы с типом ЛАХ I на возмущающее воздействие.
При оформлении отчета ответить на вопрос: Возможно ли появление статической ошибки по возмущающему воздействию? При ответе на вопрос указать причины её появления или отсутствия.
5. Провести исследование системы с ЛАХ типа II по управляющему воздействию при вариациях постоянной настройки регулятора τ. Результаты исследования занести в форму 5. Начальное значение τ принять равным 4ТΣ , увеличивать τ до тех пор пока перерегулирование не достигнет величины τ=40ТΣ (8…10 точек)
Форма 5
|
τ |
|
|
. . . |
|
|
|
tпп |
|
|
|
|
|
|
σ |
|
|
|
|
|
|
Δω |
|
|
|
|
|
При оформлении отчета ответить на вопрос: При каких параметрах регулятора динамические свойства в системе с ЛАХ тип II будут приближаться к динамическим свойствам системы с ЛАХ тип I? Представить совместно графики переходных процессов по управляющему и возмущающему воздействиям, полученных в п. 4 и графики из п. 5 при τ=4ТΣ. Дать сравнительную оценку этих процессов.
6. Для системы с ЛАХ тип III выбрать вид корректирующего звена и определить его параметры. Сохранить полученные переходные процессы по управляющему и возмущающему воздействиям.
При оформлении отчета ответить на вопрос: Можно ли не прибегая к моделированию оценить величину статических ошибок по управляющему и возмущающему воздействиям и как решить такую задачу?
7. При вариациях коэффициента передачи регулятора найти такое его значение , при котором перерегулирование не будет превышать 5%, а статическая ошибка по управляющему воздействию будет минимальной.
При оформлении отчета графики переходных процессов представить совместно с соответствующими графиками, полученными в п. 6.