


5 - 22 Логические операции
• Регулирующий клапан – вызывает специализированное окно регулирующего клапана.
5.4.2Split Range Controller
Этот раздел в настоящее время на русский язык не переведен.
5.4.3Ratio Controller
Этот раздел в настоящее время на русский язык не переведен.
5.4.4ПИД – регулятор
Операция ПИД Регулятор является основным инструментом управления моделью в динамическом режиме. Операция меняет расход указанного выходного потока (OP) таким образом, чтобы определенная переменная технологической схемы (PV) получили бы определенное указанное значение
(SP).
Работа ПИД-регулятора может не ограничиваться одной схемой. Возможно, измеряемая величина находится в одной схеме, а управляющий клапан – в другой.
Вспециализированном окне операции имеется пять закладок:
•Соединения
•Параметры
•Монитор
•Диаграммные ленты
•Переменные пользователя
Логические операции 5 - 23
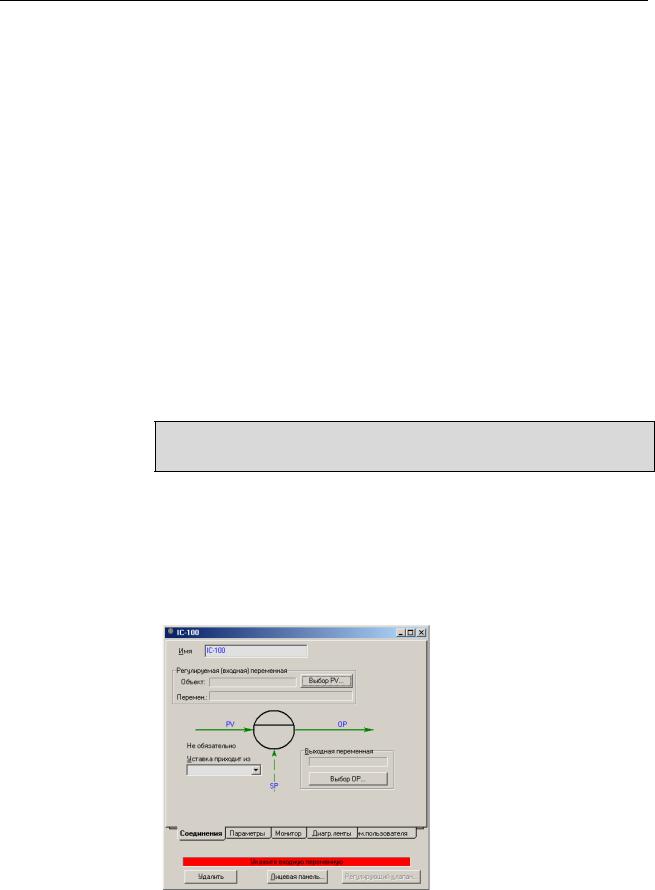
Закладка Соединения
На этой закладке выбираются Входная и выходная переменные. Задаются следующие параметры
Объект |
Описание |
Имя |
Имя регулятора. Может быть напечатано в поле, выбрано из |
|
списка и в любой момент изменено. |
Объект |
Имя объекта (потока или операции), которому принадлежит |
регулируемой |
регулируемая переменная. Выбирается с помощью Навигатора |
переменной |
переменных. |
Регулируемая |
Имя регулируемой переменной. |
переменная |
|
|
|
Выходная |
Поток или клапан, который управляется текущей операцией |
переменная |
Регулятор. |
Выбор PV/ОР |
С помощью этих двух кнопок открывается окно Навигатора |
|
переменных, с помощью которого выбирается целевой объект и |
|
целевая переменная соответственно. |
Уставка |
Если используется уставка из удаленного источника, выберите |
приходит из |
его здесь. |
|
|
Работа с Навигатором переменных
Для вызова Навигатора переменных нажмите кнопку Выбор PV. В появившемся окне последовательно выберите объект и нужную переменную.
Регулируемая переменная (PV) –это переменная, значение которой должно поддерживаться на определенном уровне.
Подробнее см. Раздел
1.3.9 –
Специализированное окно Навигатор переменных.
Удаленный источник уставки
Удаленным источником уставки может быть Электронная таблица.
“Каскадный” режим как таковой в текущей версии не существует. Вместо него имеется возможность переключить уставку с локального на удаленный режим. Значение “удаленной уставки” может прийти из другого объекта, например, электронной таблицы или другого регулятора. В последнем случае этот регулятор будет “главным” регулятором в классической каскадной схеме регулирования.
Логические операции 5 - 25
PV и SP
PV (регулируемая переменная) – это измеряемая переменная, значение которой поддерживается регулятором.
SP (уставка) – значение регулируемой переменной, которое должно быть обеспечено регулятором. В зависимости от режима работы регулятора уставка либо задается пользователем, либо только выводится на экран.
Для работы регулятора необходимо:
1.Определить минимальное и максимальное значения PV (регулятор не выйдет из режима off (откл.) пока не будут заданы эти значения).
2.Как только это сделано, а также заданы минимальное и максимальное значения расхода среды (или энергии) через клапан, можно перейти в автоматический режим и задать значение уставки.
По умолчанию ХАЙСИС использует текущее значение PV в качестве уставки, но в любой момент эту величину можно изменить.
3.Величина регулируемой переменной выражается в процентах от заданного допустимого диапазона ее изменения в соответствии с уравнением:
|
PV − PVmin |
|
|
|
||
|
|
|
|
|||
PV (%) = |
|
|
|
|
×100 |
(5.16) |
PV |
− PV |
|
||||
|
max |
|
min |
|
|
|
ОР
ОР (выходная переменная) соответствует проценту открытия регулирующего клапана. Регулятор управляет степенью открытия клапана для поддержания значения регулируемой переменной на уровне уставки. ХАЙСИС рассчитывает необходимое значение выходной переменной ОР (доля открытия клапана) с помощью уравнения регулятора во всех режимах кроме ручного. В ручном режиме пользователь может задать значение ОР, при этом программа будет поддерживать значение уставки равным текущему значению регулируемой переменной.

5 - 26 Логические операции
Режим
Регулятор может находиться водном из следующих состояний:
Режим |
Описание |
Off (Откл.) |
Регулятор не управляет регулирующим клапаном, но |
|
отслеживает соответствующую информацию. |
|
|
Manual (Ручной) |
Позволяет вручную изменять выходной сигнал |
|
регулятора. |
|
|
Auto |
Регулятор изменяет выходной сигнал в соответствии с |
(Автоматический) |
изменением рабочих параметров на основе расчетного |
|
уравнения регулятора. |
|
|
Casc (Каскадный) |
Этот режим используется в случае, когда указан |
|
удаленный источник уставки и позволяет реализовать |
|
при расчете схему каскадного регулирования. |
Indicator |
Позволяет рассчитывать параметры регулирования, не |
|
осуществляя реального регулирования процесса. |
|
|
Режим регулятора может быть также задан на лицевой панели регулятора
(См. Раздел 5.13.2 – Лицевые панели регуляторов).
Доступ
Из падающего списка можно выбрать один из вариантов:
•Internal – управляющая переменная является внутренней переменной программы ХАЙСИС.
•External - осуществляется реальное управление с помощью DCSсистемы.
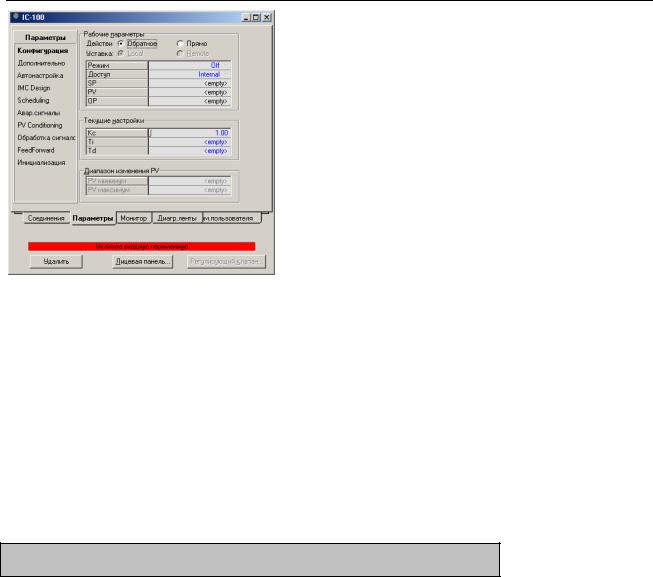
Настройки
В этой группе задаются константы уравнения регулятора, приведенного ниже:
OP(t) = OPSS + KC E(t) + |
KC |
∫E(t)dt + KCTd |
dE(t) |
(5.17) |
T |
dt |
|||
|
i |
|
|
|
где OP(t) – выходной сигнал регулятора в момент времени t
OPss – выходной сигнал регулятора в стационарном состоянии (при нулевой невязке)
E(t) – Невязка в момент времени t
Кс – коэффициент усиления – пропорциональный член уравнения регулятора
Ti – интегральный член уравнения регулятора |
|
Td – дифференциальный член уравнения регулятора |
|
Невязка – это разность между текущим значением регулируемой |
|
переменной и значением уставки. |
|
E(t) = SP(t) − PV (t) |
(5.18) |
Выходной сигнал регулятора рассчитывается на основе невязки в соответствии с заданными настроечными параметрами. Если задан только один коэффициент Кс, - моделируется пропорциональный регулятор, если заданы коэффициенты Кс и Ti, - моделируется пропорционально-

Логические операции 5 - 27
интегральный регулятор, и, наконец, пропорционально-интегрально- дифференциальный (ПИД) регулятор требует задания всех трех коэффициентов: Kc, Ti и Td.
Действие
Регулятор может быть прямого и обратного действия:
Действие Описание
Прямое Когда значение регулируемой переменной становится выше уставки, выходной сигнал повышается. Когда значение регулируемой переменной становится ниже уставки, выходной сигнал снижается.
Обратное Когда значение регулируемой переменной становится выше уставки, выходной сигнал снижается. Когда значение регулируемой переменной становится ниже уставки, выходной сигнал повышается.
Приведенное выше уравнение (12.17) применимо к регуляторам обратного действия: когда значение регулируемой переменной (PV) превышает значение уставки (SP) невязка становится отрицательной и выходной сигнал (ОР) уменьшается. В случае регулятора прямого действия величину Кс нужно заменить на (-Кc). Типичный пример использования регулятора прямого действия – регулирование температуры в ребойлере. В этом случае если температура в емкости превышает значение уставки, - выходной сигнал уменьшается и соответственно закрывает клапан на тепловом потоке. Некоторые другие типовые примеры регуляторов прямого и обратного действия приведены ниже.
Прим.1: Регулятор прямого действия – регулирование потока ветвителя
Допустим, имеется ветвитель, в котором поток питания разделяется на два выходных потока. Мы хотим регулировать расход потока Продукт 1, изменяя расход потока Продукт 2.
PV и SP |
Расход Продукт 1 |
OP |
Расход Продукт 2 |
Расход Продукта1 > SP |
OP возрастает, в результате расход Продукт 2 |
|
возрастает, а расход Продукт 1 снижается. |
Расход Продукта1 < SP |
OP уменьшается, в результате расход Продукт 2 |
|
уменьшается, а расход Продукт 1 увеличивается. |
Прим.2: Регулятор прямого действия – регулирование давления в емкости
Пусть мы хотим регулировать давление в емкости V-100 посредством расхода парового продукта SepVapor
PV и SP |
Давление в емкости V-100 |
OP |
Расход SepVapor |
Давление V-100 > SP |
OP возрастает, в результате расход SepVapor |
|
возрастает, и давление в емкости снижается. |
Давление V-100 < SP |
OP уменьшается, в результате расход SepVapor |
|
уменьшается, и давление в емкости увеличивается. |
5 - 28 Логические операции
Прим.1: Регулятор обратнго действия – регулирование температуры в ребойлере
Регулятор обратного действия можно использовать для регулирования температуры в ребойлере R-100 путем изменения количества подводимого тепла RebDuty.
PV и SP |
Температура в R-100 |
OP |
Расход RebDuty |
Температура R-100 > SP |
OP уменьшается, в результате расход RebDuty |
|
снижается, и температура в R-100 снижается. |
Температура R -100 < SP |
OP увеличивается, в результате расход RebDuty |
|
увеличивается, и температура в R-100 повышается. |
Прим.2: Регулятор обратнго действия – регулирование давления в ребойлере
С помощью регулятора обратного действия будем регулировать давление в ребойлере, изменения количества подводимого тепла RebDuty.
PV и SP |
Давление в R-100 |
OP |
Расход RebDuty |
Давление R-100 > SP |
OP уменьшается, в результате расход RebDuty |
|
снижается, и давление в R-100 снижается. |
Давление R -100 < SP |
OP увеличивается, в результате расход RebDuty |
|
увеличивается, и давление в R-100 повышается. |
Уставка
Имеется возможность переключить уставку с локального на удаленный режим. Значение “удаленной уставки” может прийти из другого объекта, например, электронной таблицы или другого регулятора. В последнем случае этот регулятор будет “главным” регулятором в классической каскадной схеме регулирования.
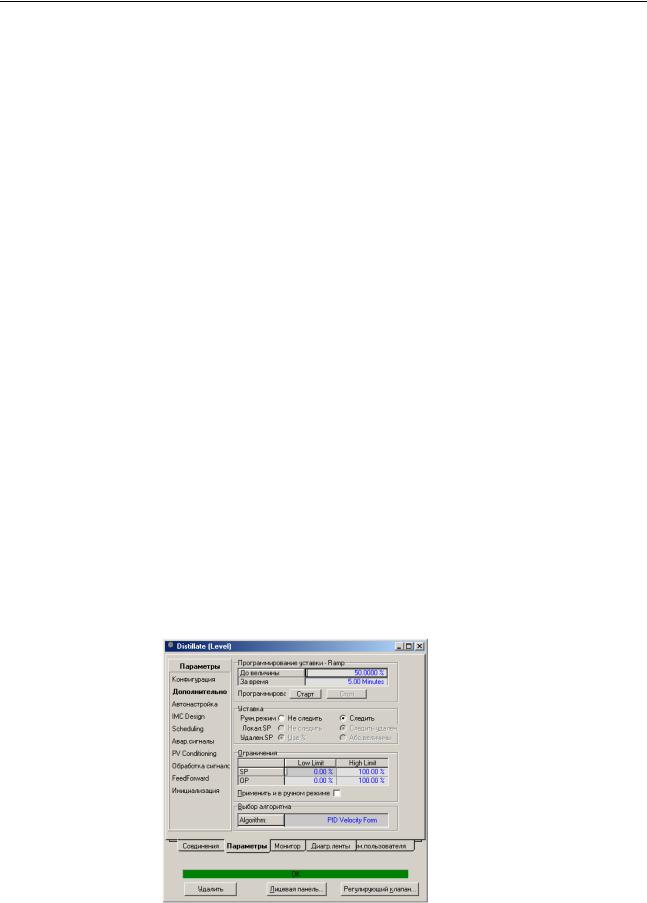
Страница Дополнительно
Логические операции 5 - 29
На странице расположены следующие четыре группы параметров:
Группа |
Описание |
Программирование |
Расход RebDuty |
уставки - Ramp |
|
Уставка |
OP уменьшается, в результате расход RebDuty |
|
снижается, и давление в R-100 снижается. |
Ограничения |
OP увеличивается, в результате расход RebDuty |
|
увеличивается, и давление в R-100 повышается. |
Выбор алгоритма |
Задается алгоритм работы регулятора |
|
|
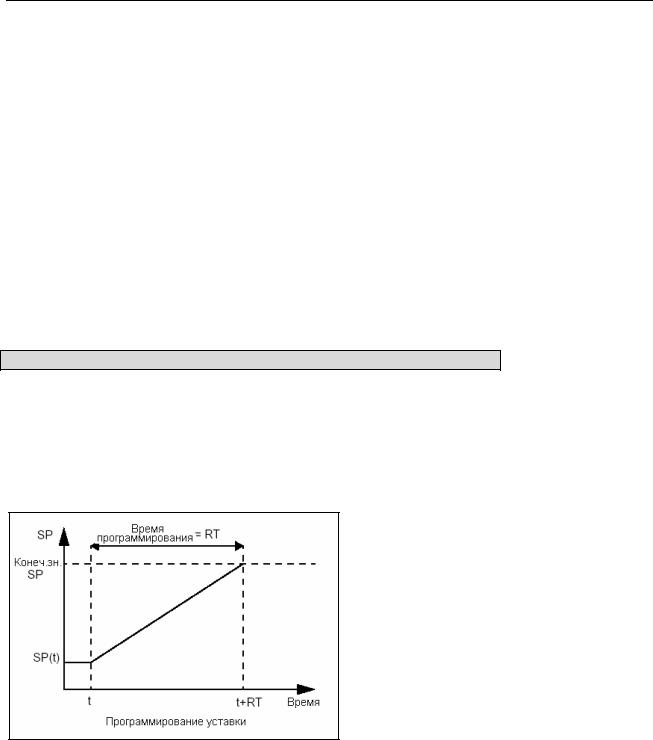
Группа Программирование уставки - Ramp
В настоящей версии программы функция программирования уставк4и была изменена по сравнению с предыдущими версиями. Сейчас, если включен режим программирования (нажата кнопка Старт), уставка продолжает линейно изменяться после того, как достигнуто целевое значение за заданный промежуток времени.
Программирование уставки возможно только в автоматическом режиме.
Вгруппе имеется два поля:
•До величины – Здесь задается конечное значение уставки, которое должно быть достигнуто в конце интервала программирования. Если режим программирования не включен, то в этом поле выводится то же значение, что и в поле SP на странице Конфигурация.
•За время – здесь задается время, за которое должно быть достигнуто конечное значение уставки.
Кроме того в группе расположены две кнопки:
•Старт – запускает процесс программирования уставки
•Стоп – останавливает процесс программирования уставки
Когда регулятор находится в режиме программирования уставки, имеется возможность изменить конечное значение уставки следующими способами:
•Задать новое значение в поле До величины на этой странице
•Задать новое значение уставки в поле SP на странице
Конфигурация.