

2 семестр / ПОСОБИЕ_ВычМат
.pdf41
Вприложении MathCAD выполните следующие действия:
1.Введите матрицы А и В с помощью кнопки панели инструментов Matrix
|
æ −0.77 |
−0.04 |
0.21 |
−0.18 |
ö |
|
æ −1.24 |
ö |
|||
|
ç |
0.45 |
−1.23 |
0.06 |
0 |
÷ |
|
ç |
0.88 |
÷ |
|
A := |
ç |
÷ |
B := |
ç |
÷ |
||||||
ç |
0.26 |
0.34 |
−1.11 |
0 |
÷ |
ç |
−0.62 |
÷ |
|||
|
|
||||||||||
|
ç |
0.05 |
−0.26 |
0.34 |
−1.12 |
÷ |
|
ç |
1.17 |
÷ |
|
|
è |
ø |
|
è |
ø |
||||||
2. Вычислите ранг исходной матрицы
rank(A)=4
3.Вычислите ранг расширенной матрицы. Встроенная функция augment(A,B) объединяет две матрицы, имеющие одинаковое количество
строк, в одну
rank(augment(A,B))=4
4. Найдите решение системы матричным методом Х:=А-1×В; 5. Получили результат
é |
2.048 |
ù |
ê |
|
ú |
ê0.086 |
ú |
|
x = ê |
|
ú |
ê |
1.065 |
ú |
ê |
ú |
|
ê |
|
ú |
ë- 0.65û
6. Найдите решение системы с помощью функции lsolve(А, В)
Х1:=lsolve(А, В)
é |
2.048 |
ù |
ê |
|
ú |
ê0.086 |
ú |
|
x1 = ê |
|
ú |
ê |
1.065 |
ú |
ê |
ú |
|
ê |
|
ú |
ë- 0.65û |
||
7. Сравните результаты. |
|
|
Задания к данной теме приведены в приложении Б.
42
3 МЕТОДЫ ПРИБЛИЖЕНИЯ ФУНКЦИЙ
3.1 Понятие о приближении функций
Пусть величина y является функцией аргумента x. Вместе с тем на практике часто неизвестна явная связь между y и x, т. е. невозможно записать эту связь в виде некоторой зависимости y = f(x). Наиболее распространенным и практически важным случаем является задание этой связи в виде некоторой таблицы {xi, yi}. Это означает, что дискретному множеству значений аргумента {xi} поставлено в соответствие множество значений функции {yi} (i = 0, 1, …, n). На практике нам могут понадобиться значения величины y в других точках, отличных от узлов {xi}. Этой цели служит задача о приближении функций: данную функцию f(x) требуется приближенно заменить некоторой функцией ϕ(x) так, чтобы отклонение, в некотором смысле, ϕ(x) от f(x) в заданной области было наименьшим. Способы оценки близости приближений порождают различные методы интерполирования и аппроксимации функций.
3.2 Интерполирование функций
Задача интерполирования заключается в следующем. На отрезке [a, b] заданы n+1 точки x0, x1, …, xn, которые называются узлами интерполяции, и значения некоторой функции f(x) в этих точках
f(x0) = y0, f(x1) = y1, …, f(xn) = yn .
Требуется построить функцию ϕ(x) (интерполирующая функция), принадлежащую известному классу и принимающую в узлах интерполяции те же значения, что и f(x), т. е. такую, что
ϕ(x0) = y0, ϕ(x1) = y1, …, ϕ(xn) = yn.
Геометрически это означает, что нужно найти кривую y = ϕ(x) некоторого определенного типа, проходящую через заданную систему точек Mi(xi, yi) (i = 0, 1, …, n).
Полученную интерполяционную формулу y = ϕ(x) обычно используют для приближенного вычисления значений данной функции f(x) для значений аргумента x, отличных от узлов интерполирования. Если при этом x [x0, xn], то такую операцию называют интерполированием функции f(x), иначе – экстраполировани- ем.
3.2.1 Интерполяционная формула Лагранжа
Пусть на отрезке [a, b] даны n+1 различных значений аргумента: x0, x1, …, xn и известны для y = f(x) соответствующие значения:
f(x0) = y0, f(x1) = y1, …, f(xn) = yn .
Требуется построить многочлен Ln(x) степени не выше n, имеющий в заданных узлах x0, x1, …, xn те же значения, что и функция f(x), т. е. такой, что

43
Ln(xi) = yi (i = 0, 1, …, n).
Будем искать интерполяционный многочлен в виде линейной комбинации многочленов степени n:
Ln(x) = y0l0(x) + y1l1(x) + …+ ynln(x). |
(1) |
При этом потребуем, чтобы каждый многочлен li(x) обращался в нуль во всех узлах интерполяции, за исключением одного i-го, где он должен равняться единице. Легко проверить, что этим условиям отвечает многочлен вида
n
Õ( x − x j )
j =0
li(x) = jn¹i , (2)
Õ( xi − x j )
j =0 j ¹i
где i = 0, 1, …, n.
Подставляя в формулу (1) выражение li(x) из формулы (2), находим
|
n |
|
|
||
|
Õ( x − x j ) |
|
|
||
n |
j =0 |
|
|
||
j ¹i |
|
|
|||
Ln(x) = å yi |
. |
(3) |
|||
n |
|
||||
i=0 |
Õ( xi − x j ) |
|
|
||
|
|
|
|||
j =0 j ¹i
Формула (3) определяет интерполяционный многочлен Лагранжа.
Пример 1. Составить алгоритм и программу на языке Turbo Pascal интерполирования функции f(x) на отрезке многочленом Лагранжа по системе 5 узлов в точках: M1(1.05, 2.8577), M2(1.09, 2.9743), M3(1.13, 3.0957), M4(1.15, 3.1582), M5(1.17, 3.2220).
1.Определить исходные данные: число узлов интерполяции n + 1 = 5, вектор абсцисс x = (1,05; 1,09; 1,13; 1,15; 1,17); вектор ординат y = (2.8577, 2.9743, 3.0957, 3.1582, 3.2220).
2.Ввести значение абсциссы C – точку для интерполяции.
n
3. Вычислить значение полинома Лагранжа P = åyk Lk .
k=0
3.1.Присвоить P = 0.
3.2.Организовать цикл, изменяя параметр k = 0, 1, ..., n.
n |
n |
3.2.1. Вычислить значение Lk = Õ( C − x j ) / Õ( xk − x j ). |
|
j=0 |
j=0 |
j¹k |
j¹k |
3.2.1.1. Определить Lk = 1.
44
3.2.1.2.Организовать цикл, изменяя параметр j = 0, 1, ..., n.
3.2.1.2.1.Если j¹k вычислить Lk = Lk*(C–xj)/(xk – xj).
3.2.1.3.Конец цикла по параметру j.
3.2.2. Вычислить P = P + yk * Lk. 3.3. Конец цикла по параметру k.
4.Вывод результата P – значение полинома Лагранжа в точке x = C.
5.Конец вычислений.
Программа интерполирования функции полиномом Лагранжа
Program Lagrang; uses crt;
const n=4;
{описание узлов интерполяции}
x:array[0..n] of real = (1.05, 1.09, 1.13, 1.15, 1.17); y:array[0..n] of real = (2.8577, 2.9743, 3.0957, 3.1582, 3.2220); var
k,j:byte;
P,L,c:real; begin
writeln('Введите значение х - точку для интерполирования'); readln(c);
P:=0; {для результата интерполирования}
{вычисление значения полинома Лагранжа в точке x=c} for k:=0 to n do
begin L:=1;
for j:=0 to n do if j<>k then
L:=L*(c-x[j])/(x[k]-x[j]); P:=P+y[k]*L;
end;
write('x=',c:7:2,' P=',P:7:4);
writeln(', табличное значение=',exp(c):7:4); readkey;
end.
3.2.2 Интерполяционные формулы Ньютона
Рассматриваемые здесь интерполяционные формулы Ньютона используются в случае равноотстоящих значений аргумента, т. е. xi+1 – xi = h = const (i = 0, 1, ..., n). Величина h называется шагом.
Введем понятие конечных разностей. Пусть функция y = f(x) задана табличными значениями yi = f(xi) для системы равноотстоящих точек xi.
Разностями первого порядка функции называются выражения вида
45
∆yi = yi+1 – yi (i = 0, 1, …, n–1).
Разностями второго порядка функции называются выражения вида
∆2yi = ∆(∆yi )= ∆yi+1 – ∆yi (i = 0, 1, …, n–1).
Аналогично составляются разности порядка k
∆kyi = ∆(∆k–1yi )= ∆k–1yi+1 – ∆k–1yi (i = 0, 1, …, n–1).
Отметим, что для вычисления k-ой разности ∆kyi нужно знать k+1 членов y: yi+1, ...
yi+k данной последовательности.
Перейдем теперь к построению интерполяционного многочлена Ньютона. В соответствии с задачей интерполирования функции требуется подобрать многочлен Pn(x) степени не выше n, принимающий в точках xi значения
Pn(xi) = yi (i = 0, 1, …, n). |
(4) |
Этот многочлен будем искать в следующем виде: |
|
Pn(x) = a0 + a1(x–x0)[1] + a2(x–x0)[2] + …+ an(x–x0)[n], |
(5) |
где |
|
(x – x0)[k] = (x – x0)(x – x1)...(x – xk–1). |
|
Задача состоит в определении коэффициентов ak (k = 0, 1, …n) многочлена Pn(x). Полагая в формуле (5) x = x0, получаем
Pn(x0) = a0,
откуда, с учетом значения многочлена (4), a0 = y0.
Полагая в формуле (5) x = x1, получаем
Pn(x1) = a0 + a1(x1 – x0) = a0 + a1h = y1,
откуда
a1 = |
y1 − a0 |
= |
y1 − y0 |
= |
y0 . |
|
h |
h |
|||||
|
|
|
h |
Полагая в формуле (5) x = x2, получаем
Pn(x2) = a0 + a1(x2 – x0) + a2(x2 – x0)(x2 – x1) = a0 + 2a1h + 2a2h2 = y2,
откуда
|
|
y2 − a0 − 2a1h |
|
y2 |
− y0 − 2 |
y0 |
h |
|
2 |
y0 |
|
a2 |
= |
= |
|
|
h |
|
= |
|
. |
||
2h2 |
|
2h2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
2h2 |
||||
Аналогично можно найти и другие коэффициенты. Общая формула имеет вид
ak = |
k y |
(k = 0, 1, …, n). |
0 |
||
|
k!hk |
|
46
Подставляя найденные значения коэффициентов ak (k = 0, 1, …n) в выражение (5),
получаем первую интерполяционную формулу Ньютона:
Pn(x)=y0+ |
y |
(x–x0) |
[1] |
+ |
2 y |
(x–x0) |
[2] |
+...+ |
n y |
(x–x0) |
[n] |
. |
(6) |
0 |
|
0 |
|
0 |
|
||||||||
|
1! h |
|
|
|
2! h2 |
|
|
|
n! hn |
|
|
|
|
Для практического использования интерполяционную формулу Ньютона (6) обычно записывают в виде формулы (7), для чего вводится новая переменная
q = x − x0 , h
представляющая собой число шагов, необходимых для достижения точки x, исходя из точки x0. Тогда
Pn(x) = Pn(x0 + qh) = y0 + q∆y0 + q( q − 1) ∆2y0 + ...
2!
+ |
q( q − 1)...( q −( n −1)) |
∆ny0. |
(7) |
||
n! |
|
||||
|
|
|
|||
Первая интерполяционная формула Ньютона обычно используется для интерполирования вперед и экстраполирования назад.
Если разности вычислять справа налево, то в этом случае
q = x − xn , h
т. е. q < 0 и интерполяционный многочлен Ньютона можно получить в виде
Pn(x) = Pn(xn + qh) = yn + q∆yn-1 + q( q + 1) ∆2yn-2 + ...
2!
+ |
q( q + 1)...( q + ( n − 1)) |
|
∆ny0. |
(8) |
|
n! |
|||||
|
|
|
|||
Формула (8) называется вторым интерполяционным многочленом Ньютона
и обычно используется для интерполирования в конце таблицы, т. е. в правой половине отрезка [x0, xn], и экстраполирования вперед.
Погрешность вычисления при интерполировании по формулам Ньютона оценивается остаточным членом:
– для первой формулы
≈ q( q − 1)...( q − n ) Rn(x) +
( n 1)!
– для второй формулы
≈ q( q + 1)...( q + n ) Rn(x) +
( n 1)!
n+1 y0 ;
n+1 yn ,
где предполагается, что n+1y почти постоянны для функции y = f(x) и h – достаточно мало.

47
Замечание. В практических задачах возможна ситуация, когда Dkyi = 0, для некоторого 1< k £ n. Тогда степень полинома равна k–1 < n.
3.2.2.1 Алгоритмы интерполирования многочленами Ньютона
Рассматриваемые алгоритмы интерполирования основаны на формулах (7) и
(8). Для вычисления разностей различных порядков удобно использование следующего рекуррентного соотношения:
Dny = |
ì |
yi , |
если n = 0, |
(9) |
i |
í |
|
- Dn−1 yi , если n > 0. |
|
|
îD( Dn−1 yi ) = Dn−1 yi+1 |
|
||
Заметим также, что множитель |
|
||
|
q( q − 1)( q − 2 )...( q − ( i − 1)) |
(10) |
|
|
i! |
|
|
|
|
||
в i-ом слагаемом формулы (7) может быть вычислен с использованием предыдущего множителя, а именно
q( q − 1)( q − 2 )...( q −( i − 2 )) × q −( i − 1) . ( i - 1)! i
1444442444443
предыдущий множитель
Аналогичное соотношение имеет место в формуле (8).
Алгоритм расчета по первой интерполяционной формуле Ньютона
1.Ввести значения: n (n+1 – число узлов интерполяции), x0 – начальное значение аргумента, h – шаг интерполирования, yi (i = 0, 1, …, n) –значение функции в i-ом узле интерполяции, x – значение аргумента для интерполирования функции.
2.Вычислить q = (x – x0)/h.
3.Вычислить Pn(x) = y0 – учитываем первое слагаемое в формуле (7).
4.Определить p = 1.
5.Организовать цикл интерполирования, изменяя параметр i =1, 2, … n.
5.1. Вычислить p = p× q −( i − 1) – множитель (10). i
5.2.Вычислить Diy0 по формуле (9).
5.3.Вычислить Pn(x) = Pn(x) + p×Diy0 – суммирование i-го слагаемого в фор-
муле (7).
6.Конец цикла интерполирования по параметру i.
7.Вывод x – значение аргумента, Pn(x) – результат интерполирования функции.
8.Конец вычислений.
Алгоритм расчета по второй интерполяционной формуле Ньютона можно получить модификацией вышеописанного алгоритма, в частности:
1.Вычислить q = (x – xn)/h, где xn = x0 + nh.
2.Вычислить Pn(x) = yn.

48
2.1. Вычислить p = p× q + ( i − 1) . i
2.2. |
Вычислить iyn-i. |
2.3. |
Вычислить Pn(x) = Pn(x) + p × iyn-i. |
Пример 2. Составить программы на языке Turbo Pascal интерполирования функции f(x) на отрезке многочленами Ньютона по системе 5 узлов в точках: M1(1.05, 2.8577), M2(1.09, 2.9743), M3(1.13, 3.0957), M4(1.17, 3.2220), M5(1.21, 3.3535).
{первая интерполяционная формула Ньютона} program pNuton1;
uses crt; const
n = 4; {число узлов интерполяции, счет от нуля} type
Tmas = array[0..n] of real;
{*******функция вычисляет k-ю разность yi} function fdelta( var y : Tmas; i, k : byte) : real; begin
if k = 0 then fdelta := y[i] else fdelta := fdelta(y, i+1, k-1) - fdelta(y,i,k-1) end;
{основная программа} const
y : Tmas = (2.8577, 2.9743, 3.0957, 3.2220, 3.3535); var
i : byte; x0 , x , h , p , pn : real; delta, q : real; begin
x0:=1.05; h := 0.04;
writeln('Введите значение аргумента x для выполнения интерполяции'); readln(x);
pn:=y[0]; q:=(x-x0)/h; p:=1;
for i:=1 to n do {цикл интерполирования}
begin p:=p*(q-(i-1))/i; delta:=fdelta(y,0,i); pn:=pn+p*delta; end; writeln('Для значения x = ', x:12:5, ' получен результат Pn =', pn:12:5 ); writeln('Точное значение: ', exp(x):12:5);
readkey;
end.
{вторая интерполяционная формула Ньютона} program pNuton2;
uses crt; const n=4;
type Tmas=array[0..n] of real; {*******функция вычисляет k-ю разность yi}
49
function fdelta( var y:Tmas;i,k:byte):real; begin
if k = 0 then fdelta := y[i] else fdelta := fdelta(y, i+1, k-1) - fdelta(y, i, k-1) end;
{основная программа} const
y : Tmas = (2.8577, 2.9743, 3.0957, 3.2220, 3.3535); var
i : byte; x0, x, h, p, pn, delta, xn, q : real; begin
h:=0.04; x0:=1.05;
writeln('Введите значение аргумента x для выполнения интерполирования'); readln(x);
pn := y[n]; xn := x0 + n*h; q := (x-xn)/h; p:=1; for i:=1 to n do
begin
p:=p*(q+(i-1))/i; delta:=fdelta(y,n-i,i);{вычисляет i-ю разность y[n-i]} pn:=pn+p*delta;
end;
writeln('x=',x:12:5,' Pn =',pn:12:5); writeln('Точное значение = ',exp(x):12:5); readkey;
end.
3.2.3 Интерполирование функций средствами MachCAD
Система MathCAD предоставляет возможность интерполяции функций с помощью сплайнов. При сплайн-интерполяции исходная функция заменяется отрезками кубических полиномов, проходящих через три смежные узловые точки. Коэффициенты полиномов рассчитываются так, чтобы непрерывными были первая и вторая производные. Линия, которую описывает сплайн-функция, напоминает по форме гибкую линейку, закрепленную в узловых точках.
Для осуществления сплайновой интерполяции предлагается четыре встроенные функции. Три из них служат для получения векторов вторых производных сплайн-функций при различном виде интерполяции:
§cspline (X, Y) – возвращает вектор S вторых производных при приближении в опорных точках к кубическому полиному;
§pspline (X, Y) – возвращает вектор S вторых производных при приближении в опорных точках к параболической кривой;
§lspline (X, Y) – возвращает вектор S вторых производных при приближении в опорных точках к прямой.
Четвертая функция - interp (S, X, Y, z) – возвращает значение у(х) для заданных векторов S, X, Y и заданного значения z.
Выполните в системе MachCAD следующие действия:
1. Организуйте данные в виде отсортированных соразмерных векторов:
|
50 |
X := (1.05 1.09 1.13 1.15 1.17 )T |
Y := (2.8577 2.9743 3.0957 3.1582 3.222 )T |
2. Задайте вектор вторых производных при помощи одной из приведенных выше функций семейства *spline, например lspline:
s1 := lspline(X ,Y)
é |
0 |
ù |
ê |
3 |
ú |
ê |
ú |
|
ê |
|
ú |
ê |
0 |
ú |
ê |
|
ú |
ê |
0 |
ú |
s1 = ê |
|
ú |
ê3.875ú |
||
ê |
|
ú |
ê |
2.5 |
ú |
ê |
|
ú |
ê |
4.25 |
ú |
ê |
|
ú |
ê |
0 |
ú |
ë |
û |
|
3.Задайте функцию interp(s1,x,y, z). В нашем случае:
I1(Z) := interp(lspline(X ,Y) , X ,Y ,Z)
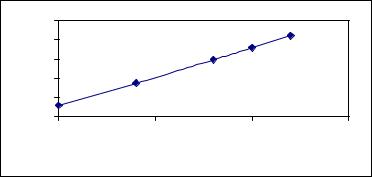
4.Постройте график, выбрав пиктограмму на панели Graph. Пропишите в соответствующих маркерах имя функции интерполяции и переменную. Получили сплайн-интерполяцию с линейным продолжением:
|
3,3 |
|
|
|
|
3,2 |
|
|
|
I1 |
3,1 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
2,9 |
|
|
|
|
2,8 |
|
|
|
|
1,05 |
1,1 |
1,15 |
1,2 |
|
|
|
Z,X |
|
5.Аналогичным образом постройте сплайн-интерполяцию, используя функции cspline, pspline. Сравните результаты.
Задания к данной теме приведены в приложении В (1).