

rm = rД (λ −1).
Полное сопротивление пускового реостата
rП = r1 + r2 + r3 +... + rm .
2.1.4. Расчёт тормозных сопротивлений двигателей постоянного тока с параллельным возбуждением
Для остановки электрических двигателей применяется два вида торможения: динамическое и противовключение. Динамическое торможение используется в основном для нереверсивных приводов, противовключение
– для реверсивных.
Тормозные сопротивления, как и пусковые, могут быть рассчитаны двумя способами: графическим и аналитическим.
Методика расчёта тормозных сопротивлений двигателей постоянного тока с параллельным возбуждением изложена в работах [1, с. 67-69; 2,
с. 58-65; 3, с. 91-109].
Динамическое торможение
Динамическое торможение осуществляется при замыкании вращаю-
щегося якоря двигателя на тормозное сопротивление после отключения его от сети. Обмотка возбуждения двигателя должна оставаться подключённой
к сети. При этом осуществляется генераторное торможение двигателя с от-
дачей энергии тормозному сопротивлению.
Схема динамического торможения двигателя постоянного тока с параллельным возбуждением и механические характеристики естественная и
динамического торможения в относительных единицах показаны на рис. 2.4, а, б.
36

+ |
=U |
– |
v |
a |
|
|
1 |
|
|||
|
rТ |
|
vС |
ρД |
|
|
|
|
в |
||
|
IТ |
|
|
|
ест. |
|
|
д.т. |
|
|
|
+ |
Е |
rД |
|
ρДТ |
|
М – |
|
c |
|
||
iВ |
Ω |
|
|
|
|
LМ |
|
|
d |
|
|
|
|
|
|
||
|
–μ μТ.НАЧ. |
0 |
μс |
μ=1 |
μ |
|
а) |
|
б) |
|
|
Рис. 2.4. Схема динамического торможения двигателя постоянного тока с параллельным возбуждением (а) и механические характеристики естественная и динамического торможения (б)
Графический способ расчёта. Графический способ расчёта сопротивления динамического торможения выполняется в следующей последовательности (см. рис. 2.4,б):
1. Задаются (или он должен быть задан) начальным тормозным мо-
ментом в пределах допустимого значения по условиям коммутации:
μТ.НАЧ. ≤ 2,5 .
2. Строят во втором квадранте механическую характеристику динамического торможения по двум точкам с координатами [ν = νС,
μ= μТ.НАЧ.] и [ν = 0, μ = 0].
3.В первом квадранте проводят прямую, параллельную механиче-
ской характеристике динамического торможения, и находят точку пересечения её с прямой μ = 1, соответствующей номинальному моменту двигателя (точка «с»).
4.Находят численное значение тормозного сопротивления в отно-
сительных единицах, которое равно отрезку, отсекаемому при μ = 1 естественной характеристикой и прямой, параллельной механической характеристике динамического торможения (отрезок «в–с»).
5.Определяют тормозное сопротивление по формуле
37

rДТ = авсd RH .
Аналитический способ расчёта. При динамическом торможении ток якоря, протекающий в замкнутом контуре торможения:
IТ = rД +ЕrДT .
Подставим вместо Е максимально возможную величину ЭДС Емакс. и вместо IТ ток IТ.НАЧ., получим
rДТ = |
Емакс. |
−rД . |
|
IТ.НАЧ |
|||
|
|
Полагая Емакс. ≈ UH (торможение со скорости идеального холостого хода), что ведёт к некоторому увеличению тормозного сопротивления, бу-
дем иметь
rДТ ≈ |
U H |
−rД . |
|
||
|
IТ.НАЧ |
|
Противовключение
Торможение противовключением имеет место тогда, когда обмотки двигателя включены на одно направление вращения, а двигатель вращается в обратную сторону.
При реактивном статическом моменте на валу двигателя для получения противовключения необходимо поменять направление момента двигателя на противоположное по отношению к двигательному режиму. Это
можно осуществить двояко: поменять полярность напряжения на якоре,
оставив прежнюю полярность напряжения на обмотке возбуждения, или поменять полярность напряжения на обмотке возбуждения, оставив преж-
нюю полярность напряжения на якоре. Учитывая бóльшую инерционность переходных процессов в обмотке возбуждения, чем в обмотке якоря, что
38
важно для часто реверсируемых электроприводов, чаще всего противовключение получают изменением полярности напряжения на обмотке якоря.
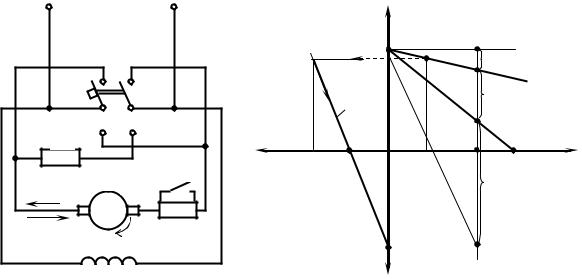
Схема включения двигателя постоянного тока с параллельным возбуждением с торможением противовключением и механические характеристики естественная и противовключения в относительных единицах по-
казаны на рис. 2.5, а, б. На схеме положение автоматического выключателя
1 – двигательный режим, положение 2 – противовключение.
При изменении полярности напряжения на обмотке якоря в контуре протекания тормозного тока напряжение и ЭДС двигателя действуют согласно и тормозной ток определяется их суммой:
|
|
IТ |
= U + E . |
|
|
|
|
|
|
rЯ |
|
|
|
+ |
=U |
– |
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
v0 |
a |
|
|
|
1 |
|
vс |
в |
ρД |
ест. |
|
|
|
|
|
||
|
QF |
|
пр |
c |
ρПУСК |
|
|
|
|
|
rПР |
|
2 |
|
|
|
μс |
d |
|
|
|
|
Е rД |
КМ |
–μ μТ.НАЧ. |
0 |
μ=1 |
μ1 |
μ |
|
IТ |
|
|
|
|
|
ρПР |
|
||
+ |
|
|
|
|
|
|
|||
|
М – |
|
|
|
|
|
|
|
|
IД |
|
Ω |
rПУСК |
|
|
|
|
е |
|
|
|
LМ |
|
|
|
–v0 |
|
|
|
|
|
|
|
|
|
|
|
v
а) |
б) |
Рис. 2.5. Схема управления двигателем постоянного тока с параллельным возбуждением с торможением противовключением (а) и механические характеристики естественная и противовключения (б)
В этом случае для ограничения тормозного тока до допустимого значения включение в цепь якоря только пускового реостата недостаточно. Требуется введение в цепь якоря добавочного сопротивления, называемого ступенью противовключения.
39
Сопротивление ступени противовключения может быть рассчитано и графическим и аналитическим способами.
Графический способ расчёта. Графический способ расчёта сопротивления ступни противовключения выполняется в следующей последовательности (см. рис. 2.4, б):
1. Задаются (или он должен быть задан) начальным тормозным мо-
ментом в пределах допустимого значения по условиям коммутации:
μТ.НАЧ. ≤ 2,5 .
2.Строят механическую характеристику торможения противовключением по двум точкам с координатами [ν = νС, μ = μТ.НАЧ.] и [ν = –νО, μ = 0].
3.В первом квадранте проводят прямую, параллельную механиче-
ской характеристике торможения противовключением, и находят точку пересечения её с прямой μ = 1, соответствующей номинальному моменту
двигателя (точка «е»).
4.Находят численное значение сопротивления ступени противовк-
лючения в относительных единицах, которое равно отрезку, отсекаемому
при μ = 1 первой искусственной характеристикой при пуске двигателя (νОμ1) и прямой, параллельной механической характеристике противовключения (отрезок «с–е»).
5.Определяютсопротивлениеступенипротивовключенияпоформуле
rПР = adсе RH .
Аналитический способ расчёта. При торможении противовключе-
нием тормозной ток, протекающий по якорю двигателя:
I= U Н + Eмакс ,
ТrЯ
40