§ 1,2, Функциональные элементы автоматических систем
Система, в которой процесс регулирования производится без участия человека, называется автоматической системой регулирования (АСР).
Достижение конечной цели регулирования в объектах, подверженных воздействию возмущений, возможно в том случае, когда используется информация о состоянии объекта, т. е. информация о текущем значении управляемой величины. Для получения этой информации в системах регулирования используются чувствительные элементы, с помощью которых управляемая величина преобразуется в сигналы, удобные для передачи по каналам связи.
Если автоматическую систему рассматривать с позиций функций, которые должны выполнять все соответствующие ее элементы, то ее можно представить в виде функциональной схемы, представленной на рис. 1.1.
Непременным элементом любой автоматической системы является управляемый объект 1, состояние которого определяют управляемая величина к, управляющая величина µ и возмущения z. Информацию о текущем значении управляемой величины дают чувствительные элементы 2, которые преобразуют физический параметр управляемой величины в удобный для передачи
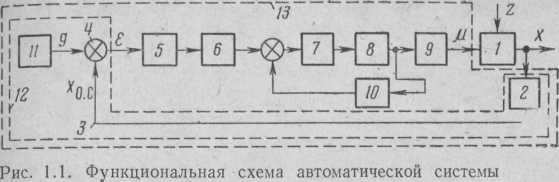
по каналам связи сигнал х0С. Канал связи 3, по которому передается информация, называется главной обратной связью. В элементе сравнения 4 заданное значение g управляемой величины сравнивается с ее текущим значением х0С, поступающим от чувствительных элементов по каналу главной обратной связи. В элементе сравнения осуществляется операция алгебраического сложения с формированием сигнала рассогласования, или ошибки управления E=g-х0с. В случае если физические величины х0с и g различны, используется задающее устройство 11, обеспечивающее требуемый закон изменения заданного значения управляемой величины и его физического соответствия сигналу хос. Все последующие элементы предназначены для реализации алгоритма управления.
Усилительный элемент 5 предназначен для усиления амплитудного значения сигнала рассогласования (ошибки) е. Корректирующие устройства 6 служат для изменения динамических свойств элементов и системы в целом. Обычно они бывают в виде последовательных корректирующих устройств 6 ив виде местных обратных связей 10. Усилитель мощности 7 усиливает сигнал рассогласования до- уровня, необходимого для приведения в действие исполнительного механизма 8, который, изменяя положение регулирующего органа 9, изменяет управляющее воздействие µ.
В промышленной автоматике элементы 2, 3, 4 и 11 объединяют под общим названием датчик 12. Элементы 5, 6, 7, 8, 9, 10 я 12 — под названием регулятор 13.
Таким образом, укрупнено автоматическую систему регулирования можно представить в виде объекта 1 и взаимодействующего с ним регулятора 13.
При возникновении рассогласования (ошибки) между заданным и текущим значениями регулируемой величины регулятор так воздействует на объект управления, изменяя управляющий параметр р,, чтобы свести это рассогласование к нулю.
В конкретных типах АСР некоторые функциональные элементы могут отсутствовать или могут быть заменены другими. Однако путь прохождения сигналов, обозначенный на рис. 1.1 стрелками, в любой автоматической системе неизменен: от элемента сравнения к объекту управления и от объекта управления через главную обратную связь к элементу сравнения. Такой путь прохождения сигналов в АСР образует замкнутый контур регулирования.
Объекты управления чаще всего являются одномерными, т. е. одной управляемой величине соответствует только одно управляющее воздействие. В более сложных случаях объекты управления могут иметь несколько управляемых величин (которые могут быть независимыми и взаимозависимыми) и несколько управляющих воздействий. В этом случае объекты называются многомерными, и если по каждому параметру ведется регулирование, то АСР такого объекта может иметь несколько замкнутых контуров регулирования. В некоторых случаях в объектах возникает зависимость управляющего воздействия от управляемой величины. Такие объекты являются не детектирующими, и процесс регулирования ими значительно усложняется.
С помощью возмущающих воздействий г оценивается влияние окружающей среды на систему регулирования. Поэтому место
Рис.
1.2. Условные изображения чувствительных
элементов и исполнительных механизмов:
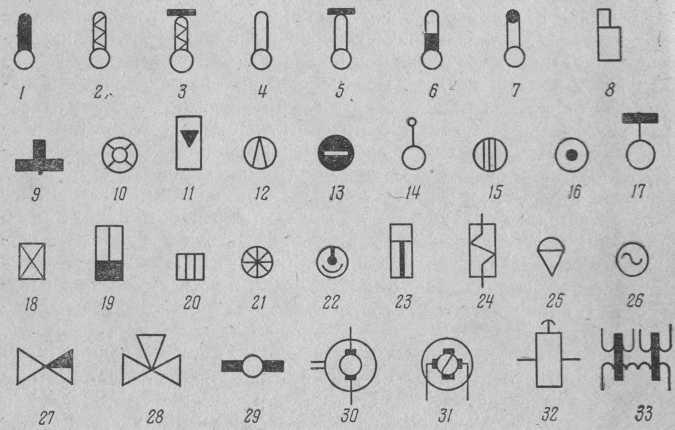
1 — термометр ртутный стеклянный; 2 — термометр сопротивления одинарный; 3 — термометр сопротивления поверхностный; 4 — термопара одинарная; 5 — термопара поверхностная; 6 — термопара скоростная; 7 — термобаллон манометрического термометра; 8 — пирометр; 9 — отборное устройство давления, уровня, состава вещества; 10 — счетчик жидкости, газа; 11 — расходомер постоянного перепада; 12 — сужающее устройство; 13 — электромагнитный расходомер; 14 — поплавковое приемное устройство; 15 — то же, ультразвуковое; 16 — то же, радиоактивное; 17 — то же, емкостное; 18 — то же, тензометрическое; 19 — то же, влагомера; 20 — то же, для вязкости, рН-метра; 21 — то же, тахометрическое; 22 — то же, фотометрическое; 23 — поршневой исполнительный механизм (ИМ); 24 — электромагнитный ИМ; 25 — мембранный ИМ; 26 — ИМ с электродвигателем; 27 — регулирующий проходной клапан; 28 —. регулирующий трехходовой клапан; 29 — регулирующая заслонка; 30 -г машина постоянного тока; 31 — усилитель электромашинный с поперечным полем; 32 — муфта электромагнитная; 33 — усилитель магнитный с двумя рабочими и одной управляющей обмотками
приложения возмущающего воздействия может быть самое разнообразное, ибо возмущения могут действовать как на любой функциональный элемент системы, так и на любой участок линий связи замкнутого контура регулирования. Нейтрализация возмущений— главная задача систем регулирования.
При выполнении функциональных схем автоматизации необходимо руководствоваться действующим ГОСТ 3925—59 «Обозначения основных величин и условные изображения приборов в схемах автоматизации производственных процессов». В схемах автоматизации упрощенно изображают управляемый объект (машины, аппарат « т. д.) вместе с коммуникациями, на которых показывают основные запорные вентили и регулирующие органы, поясняющие место съема сигналов для контрольно-регулирующей аппаратуры. На рис. 1.2 показаны условные изображения различных чувствительных элементов, воспринимающих воздействие управляемых к управляющих величин, и основных видов исполнительных механизмов.
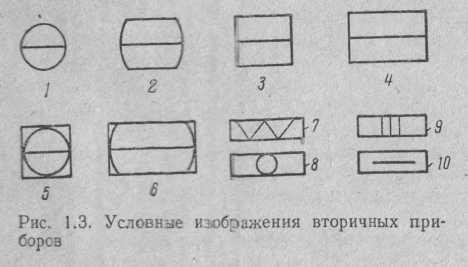
На рис. 1.3 показаны условные изображения измерительных, регулирующих и сигнализирующих вторичных приборов. Измерительный прибор изображают в виде круга 1 или части эллипса 2 с горизонтальной чертой посередине; регулирующий прибор — в виде квадрата 3 или прямоугольника 4 с горизонтальной чертой посередине. Измерительный и регулирующий приборы в одном корпусе изображают комбинированно 5 и 6. Над горизонтальной чертой указывают буквенное изображение измеряемой величины, а под чертой указывают функциональные признаки прибора согласно табл. 1.1 и 1.2.
В прямоугольниках обозначают вид дистанционной передачи: электрической 7, пневматической 8, гидравлической 9 и механической 10.
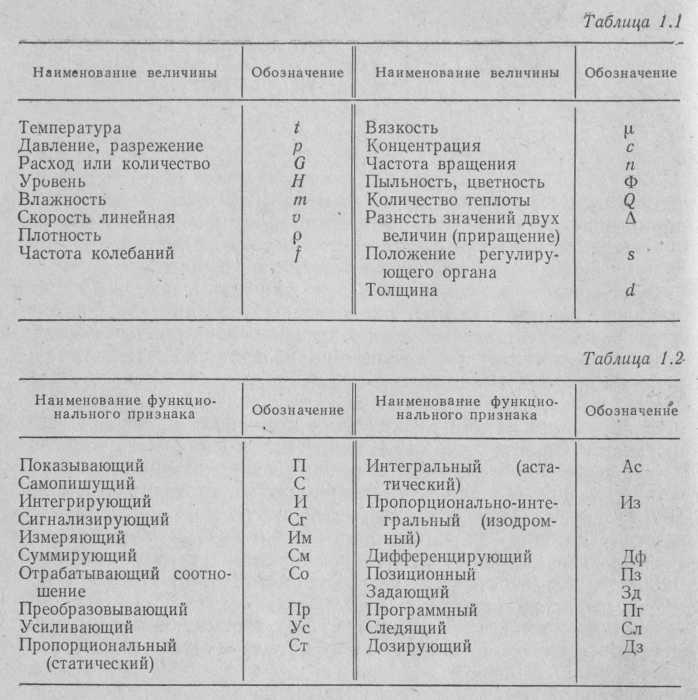
В табл. 1.1 даны условные буквенные обозначения контролируемых и регулируемых величин (по ГОСТ 3925—59), которые вписываются в условные обозначения прибора вверху над чертой.
В табл. 1.2 даны условные обозначения функциональных признаков приборов, которые вписываются в условное обозначение прибора под чертой.