

§ 1.3. Принципы управления и регулирования
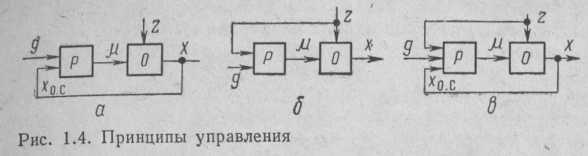
Устранение основного недостатка принципа управления по отклонению возможно в случае, если управляющее воздействие будет функционально связано с первопричиной возникновения рассогласования — возмущающим воздействием. Такой принцип называется управлением по возмущению. Преимущество этого принципа в том, что в случае появления возмущения (рис. 1.4, б) регулятор так изменяет управляющее воздействие, чтобы в дальнейшем рассогласование не возникло. Таким образом обеспечивается нейтрализация возмущения в момент его появления. В реальных, системах, когда на объект управления действует большое количество возмущений, для нейтрализации каждого из возмущений потребовался бы регулятор. Естественно, что при этом усложнится конструкция всей автоматической системы и увеличится ее состав и стоимость. Недостатком этого принципа управления является также и отсутствие зависимости между управляющим воздействием и результатом этого воздействия на объект, характерной для принципа управления по отклонению.
Принцип комбинированного управления (рис. 1.4, б) объединяет достоинства обоих рассмотренных способов управления. Этот принцип позволяет обеспечить наиболее высокую точность управления и регулирования.
§ 1.4 Классификация автоматических систем
Автоматические системы, реализующие алгоритм функционирования, могут быть отнесены к двум основным классам.
Автоматические системы первого класса выполняют свои функции по жесткой заданной программе и не используют информацию о фактическом протекании процесса. Главная обратная связь, по которой в автоматических системах передается рабочая информация, в системах этого класса отсутствует. Подобные автоматические системы называются циклическими, или безрефлексными (детерминированными), с жесткой программой управления. Безрефлексные автоматические системы являются разомкнутыми. На предприятиях по изготовлению
мебели такие системы широко распространены в виде различных автоматических станков и автоматических линий, выполняющих определенные операции технологического процесса (раскрой материалов, фрезерование, фанерование и т. д.). Все они работают по определенной программе и никак не учитывают фактическое протекание выполняемых операций, т. е. автоматическая подстройка в них отсутствует. Работа таких систем полностью определена их конструкцией и начальной настройкой. Более подробно безрефлексные системы будут рассмотрены в III разделе пособия.
Автоматические системы второго класса функционируют в зависимости от фактического протекания управляемого процесса. Такие системы называются ациклическими, или информационными (рефлексными), с замкнутой обратной связью. В информационной системе происходит непрерывный обмен информацией между управляемым объектом и управляющей системой. Управляющая система исходя из поставленной перед ней цели и полученной текущей информации вырабатывает управляющие воздействия, реализующие алгоритм управления. Автоматическая система, самостоятельно вырабатывающая алгоритм управления управляющего устройства, является системой управления, или самоприспосабливающейся системой. К таким системам относятся различные виды оптимальных и экстремальных систем.
Автоматические системы регулирования (АСР) являются тоже замкнутыми системами, но их задачей является обеспечение с требуемой точностью конкретного алгоритма управления. Далее мы подробно разберем именно этот класс автоматических систем, имеющих важное практическое значение.
По виду задающей величины АСР подразделяются на системы автоматической стабилизации, системы программного регулирования и следящие системы. В системе автоматической стабилизации алгоритм функционирования содержит предписание поддерживать управляемую величину на постоянном уровне, т. е. g (t) = const. Возмущающие воздействия z (t), действующие на систему, отклоняют управляемую величину от заданного значения. Главная цель управляющего устройства - выработать такие управляющие воздействия, чтобы не допустить отклонений управляемой величины от заданного уровня.
Для программной автоматической системы алгоритм функционирования содержит предписание изменять управляемую величину по определенному закону, т. е. g (t) = F (t), где F (t) — определенная функция времени.
Цель управляющего устройства — не допустить отклонения управляемой величины от требуемого закона ее изменения.
В следящей автоматической системе алгоритм функционирования содержит предписание изменять управляемую величину в соответствии с неизвестным законом изменения некоторой переменной величины, действующей на входе автоматической системы. В этом случае g (t) = Var.
В зависимости от характера временного изменения сигналов, передаваемых от одного элемента системы к другому, автоматические системы подразделяются на непрерывные, релейные и импульсные. Системы, в которых непрерывному изменению входных величин соответствует непрерывное изменение выходных величин, называются непрерывными. В таких системах в любой момент времени каждому значению ошибки регулирования соответствует свое значение управляющего воздействия. Системы, в которых непрерывному входному сигналу хотя бы одного из элементов соответствует последовательность импульсов, амплитуда, длительность и частота повторения которых зависят от входного сигнала элемента в отдельные (дискретные) моменты времени, называются импульсными. Системы, в которых сигнал на выходе, по крайней мере, одного из элементов изменяется скачком всякий раз, когда сигнал на его входе проходит через некоторые фиксированные значения (пороговые значения), называются релейными. Далее будет показано, что релейные системы наиболее широко используются в системах автоматизации объектов на предприятиях по ремонту и изготовлению мебели.
По числу замкнутых контуров регулирования АСР разделяются на одноконтурные и многоконтурные. Одноконтурные системы имеют только одну главную обратную связь и не имеют местных прямых или обратных связей. Многоконтурн ы е системы имеют несколько прямых или обратных связей. Многоконтурными являются и системы, в которых управляемые объекты имеют несколько управляемых величин. В этом случае система имеет несколько главных обратных связей по числу управляемых величин. Среди систем с несколькими управляемыми величинами отличают системы несвязанного и связанного регулирования. Системами несвязанного регулирования называются такие, в которых работа одного из замкнутых контуров регулирования никак не сказывается на работе других контуров регулирования. И наоборот, если работа одного из контуров регулирования оказывает влияние на другие контуры, то такие системы называются системами связанного регулирования. Примером такой системы может быть система кондиционирования воздушной среды в цехе. Назначение такой системы заключается в поддержании определенной температуры и относительной влажности воздуха. Однако регулирование температуры воздуха обязательно приведет к изменению его относительной влажности, и наоборот. Расчет таких систем значительно сложнее и далее рассматриваться не будет.
По наличию источника вспомогательной энергии АСР подразделяются на системы прямого и непрямого действия. Если чувствительный элемент системы развивает достаточную мощность и непосредственно без дополнительного источника энергии воздействует на регулирующий орган, то это система прямого действия. Эти системы наиболее простые и дешевые. Однако они не способны обеспечить высокую точность регулирования и сложный алгоритм управления. В системах, в которых чувствительный элемент не может развить достаточной мощности для перестановки регулирующего органа, обычно используют усилители мощности. Такие системы называются системами непрямого действия. Это наиболее распространенный тип систем.
По виду динамических процессов, протекающих в системах регулирования или по виду дифференциальных уравнений, которые описывают протекающие в системе динамические процессы, АСР разделяются на линейные и нелинейные.
Система, в которой динамика процессов описывается линейным дифференциальным уравнением (или любым другим линейным временным уравнением), называется линейной. Очевидно, динамические процессы в любом элементе линейной системы тоже описываются линейными, уравнениями. Линейные системы могут обеспечить только линейные алгоритмы управления и, следовательно, регуляторы, реализующие эти алгоритмы, являются также линейными. В промышленных системах автоматизации различают следующие типы линейных регуляторов: пропорциональные (П-регуляторы), интегральные (И-регуляторы), пропорционально-интегральные (ПИ-регуляторы), пропорционально-интегрально-дифференциальные (ПИД-регуляторы), пропорционально-дифференциальные (ПД-регуляторы).
Система, в которой динамика процессов описывается нелинейными уравнениями, называется нелинейной автоматической системой регулирования (НАСР). Очевидно, система является нелинейной, если хотя бы один из ее элементов описывается нелинейными уравнениями. В некоторых случаях нелинейные алгоритмы управления создаются специально, чтобы обеспечить особые свойства системы. Так, например, оптимальные по быстродействию системы управления используют толькон елинейные алгоритмы управления, реализованные на нелинейных звеньях системы.
При действии на систему возмущений в ней возникают переходные процессы (переход системы из одного установившегося состояния в другое), определяющиеся видом дифференциальных уравнений, которыми описываются все элементы системы, и начальными условиями. В некоторых случаях после затухания переходных процессов система возвращается в прежнее состояние без остаточного отклонения (статической ошибки регулирования).- В других случаях наблюдается остаточное отклонение. В зависимости от наличия статической ошибки регулирования системы разделяются на статические и астатические.
Система, имеющая в установившемся состоянии статическую ошибку регулирования, называется статической. Величина статической ошибки регулирования статической системы зависит от величины возмущения и внутренних свойств системы. Система, в которой при воздействии с течением времени, стремящимся к некоторому постоянному значению, ошибка регулирования стремится к нулю, называется астатической.
По виду энергии, используемой в процессе регулирования, АСР разделяются на электрические, пневматические, гидравлические и комбинированные. Возможна классификация автоматических систем и по другим признакам.