

9.4.7. Блок дискретного фильтра Discrete Filter
Назначение:
Блок дискретного фильтра Discrete Filterзадает дискретную передаточную функцию от обратного аргумента (1/z):
![]() ,
,
m+1 иn+1 – количество коэффициентов числителя и знаменателя, соответственно.num – вектор или матрица коэффициентов числителя,den – вектор коэффициентов знаменателя.
Параметры:
Numerator — Вектор или матрица коэффициентов числителя
Denominator –Вектор коэффициентов знаменателя
Sample time — Шаг дискретизации по времени.
На рис. 9.4.8 показан пример использования блока Discrete Filter. С помощью рассматриваемого блока моделируется дискретный аналог передаточной функции:
![]() .
.
Шаг дискретизации выбран равным 0.5с.

Рис. 9.4.8. Использование блока Discrete Filter.
9.4.8. Блок модели динамического объекта Discrete State-Space
Назначение:
Блок создает динамический объект, описываемый уравнениями в пространстве состояний:
![]() ,
,
где
x– вектор состояния,
u– вектор входных воздействий,
y– вектор выходных сигналов,
A, B, C, D- матрицы: системы, входа, выхода и обхода, соответственно,
n– номер шага моделирования.
Размерность матриц показана на рис. 9.4.9 (n– количество переменных состояния,m– число входных сигналов, r– число выходных сигналов).

Рис. 9.4.9. Размерность матриц блока Discrete State-Space
Параметры:
A –Матрица системы.
B – Матрица входа.
C – Матрица выхода
D – Матрица обхода
Initial condition – Вектор начальных условий.
Sample time — Шаг дискретизации по времени.
На рис. 9.4.10 показан пример моделирования динамического объекта с помощью блока Discrete State-Space. Матрицы блока имеют следующие значения:


Рис. 9.4.10. Пример использования блока Discrete State-Space.
9.5. Nonlinear - нелинейные блоки
9.5.1. Блок ограничения Saturation
Назначение:
Выполняет ограничение величины сигнала.
Параметры:
Upper limit - Верхний порог ограничения.
Lower limit - Нижний порог ограничения.
Treat as gain when linearizing (флажок) - Трактовать как усилитель с коэффициентом передачи равным 1 при линеаризации.
Выходной сигнал блока равен входному если его величина не выходит за порог ограничения. По достижении входным сигналом уровня ограничения выходной сигнал блока перестает изменяться и остается равным порогу. На рис. 9.5.1 показан пример использования блока для ограничения синусоидального сигнала. На рисунке приводятся временные диаграммы сигналов и зависимость выходного сигнала блока от входного.
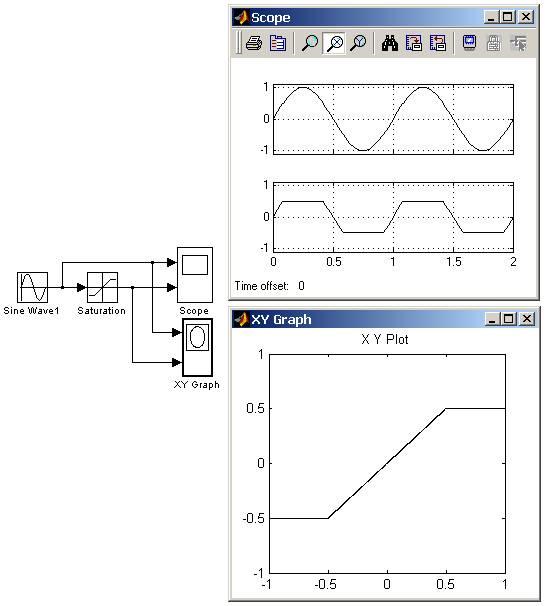
Рис. 9.5.1. Пример использования блока Saturation
9.5.2. Блок с зоной нечувствительности Dead Zone
Назначение:
Реализует нелинейную зависимость типа "зона нечувствительности (мертвая зона)".
Параметры:
Start of dead zone - Начало зоны нечувствительности (нижний порог).
End of dead zone - Конец зоны нечувствительности (верхний порог).
Saturate on integer overflow (флажок) - Подавлять переполнение целого. При установленном флажке ограничение сигналов целого типа выполняется корректно.
Treat as gain when linearizing (флажок) - Трактовать как усилитель с коэффициентом передачи равным 1 при линеаризации.
Выходной сигнал блока вычисляется в соответствии со следующим алгоритмом:
Если величина входного сигнала находится в пределах зоны нечувствительности, то выходной сигнал блока равен нулю.
Если входной сигнал больше или равен верхнему входному порогу зоны нечувствительности, то выходной сигнал равен входному минус величина порога.
Если входной сигнал меньше или равен нижнему входному порогу зоны нечувствительности, то выходной сигнал равен входному минус величина порога.
На рис. 9.5.2 показан пример использования блока Dead Zone

Рис. 9.5.2. Пример использования блока Dead Zone