

Teoria_SURRT
.pdfК1
C ф |
|
|
1 |
|
|
|
|
Rф |
|
|
Rn |
||||||
R1 |
|
|
RК1 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
En |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VT1 |
2 |
N |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
EС |
R |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
Н |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


 RС
RС
Рис. 2.1. Схема питания n-каскадного усилителя
Известно [2], что ОС изменяет неравномерность АЧХ (и другие характеристики) усилителя в (1 К ) раз. Положительная ОС увеличивает неравно-
мерность. Это повышение допускают не более 5%. Тогда усиление Тпар любой петли паразитной ОС не должно превышать Тпар < 0,05. Для исключения же самовозбуждения необходимо обеспечить по каждой петле запас устойчивости 2 раза (Тпар 0,5) [2]. Вытекает, что требования к паразитным ОС из условия стабильности характеристик гораздо жестче, чем из условия устойчивости. Помимо самовозбуждения и стабильности характеристик, при построении цепей питания необходимо учитывать проникновение на входы каскадов пульсаций напряжения ИП. Простейший способ ослабления пульсаций и паразитных ОС через ИП – шунтирование его большой емкостью Сбл , что эквивалентно уменьшению сопротивления RП. Но требуемая величина Сбл при этом может составлять тысячи микрофарад. Второй способ, эффективный и распространенный – применение RC– и LC–фильтров (рис.2.2), включаемых на пути обратной передачи в петле паразитной ОС.
31

2.2. RC и LC развязывающие фильтры.
В случае использования RC–фильтра коэффициент Фр развязки в предположении ( Cф)-1 << Rд1 (Rд1 – сопротивление по переменному току коллекторной цепи I каскада) (см. рис. 2.1, 2.2, а) составляет [2]
Фр |
|
|
|
2 |
|
|
U П |
U П |
|
(2.1) |
|||
1 ( RфCф ) . |
||||||
Отсюда определяют емкость |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
С |
R |
|
|
L |
|
R1 |
||
|
|
|
|
|
R |
1 |
|
ф |
|
|||||
фильтра: |
|
|
|
. |
ф |
ф |
д . |
|
С |
|
|
|||
|
|
|
|
. |
|
|
U |
|
ф |
. |
|
|||
|
|
|
|
U |
|
|
' |
|
|
' |
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
n |
|
|
|
||||
|
|
|
|
n |
|
|
U |
|
|
|
U |
|||
|
Ф2 |
1 |
( R |
|
|
|
|
n |
|
|
|
n |
||
С |
) , |
|
|
|
|
|
|
|
|
(2.2) |
||||
ф |
р |
|
н ф |
|
|
|
|
|
|
|
|
|
|
|
где н – нижняя граничная а б
частота полосы пропускания |
|
устройства; |
Рис. 2.2. Построение развязывающих фильтров |
|
Фр Тпар  Тпар доп ;
Тпар доп ;
Тпар доп – допустимое значение петлевого усиления паразитной ОС.
В усилителях с разделительными емкостями при < н одновременно умень-шаются коэффициенты развязки Фр и обратной передачи пар , поэтому глубина паразитной ОС не увеличивается. При последовательном включении двух фильтров с коэффициентами развязки Фр1 и Фр2 суммарный коэффициент Фр = Фр1 Фр2 . Для уменьшения емкости Сф сопротивление Rф выбирают наибольшим, определяемым допустимым падением Uф на нем напряжения EП ИП. Обычно при последовательном включении двух (редко более) RC–фильтров падение на каждом выбирают в пределах (0,05…0,15)EП, при параллельном – до 0,3EП. Иногда при помощи сопротивления Rф приходится гасить значительные излишки напряжения питания. Наличие сопротивления Rф уменьшает напряжение UП0 питания каскада: UП0 = EП ( – коэффициент использования напряжения ИП). С учетом этого функционирование RC–фильтра оценивают коэффициентом стабилизации [2]
K ( dEП  EП ) : ( dU П
EП ) : ( dU П  U П 0 ) ( dEП
U П 0 ) ( dEП  dU П ) (U П 0
dU П ) (U П 0  EП ).
EП ).
32
Но |
dEП dU |
П |
|
|
|
|
|
Фр , поэтому K = Фр . Уровень пульсаций на |
|
|
|||||||
|
U П |
U |
П |
|
выходе ИП обычно задают исходя из требований питания оконечного каскада. При больших токах сопротивление Rф приходится выбирать малым, и
требуемое значение Сф резко возрастает. В этом случае иногда применяют LC– фильтр (см. рис. 2.2, б), имеющий в предположении ( Cф)–1 << Rд1 коэффициент развязки
|
Фр |
|
|
|
|
|
|
1 |
2 |
|
|
. |
|
(2.3) |
||
|
|
|
|
|
|
|
||||||||||
|
|
U П |
U |
|
|
|
RфCф |
|
||||||||
|
|
П |
|
|
|
|
||||||||||
Для него = 1 |
и K = Фр. Дополнительно к этому, в области 0 |
< р = |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
совпадают по фазе, в области > р – проти- |
||
|
|
|
|
|
|
|
|
|
|
|
||||||
= 1 LфCф напряжения U П |
и U |
П |
||||||||||||||
воположны, что необходимо учитывать при построении устройств. Рабочей
областью является > р. При больших значениях Фр (см. (2.3)) Ф |
р |
2 L C |
, |
|||
|
|
|
|
ф ф |
||
что при фиксированной индуктивности Lф дает |
|
|
|
|||
C |
Ф |
р |
( 2 L ). |
|
(2.4) |
|
ф |
|
н ф |
|
|
|
|
Недостатками RC– и LC–фильтров являются: большие величины емкостей при низкой частоте н ; падение напряжения ИП (в RC– фильтрах); отсутствие развязки на нулевых частотах, из-за чего они практически непригодны для усилителей постоянного тока. Первый и третий недостаток устранимы с помощью электронных стабилизаторов (СТ), выходное сопротивление которых может быть настолько малым (доли ома), чтобы обеспечить устойчивую работу на нулевых частотах.
2.3. Стабилизаторы напряжения
СТ характеризуются следующими параметрами [4] (рис. 2.3, а): максимальное (оно же номинальное) выходное напряжение U2 mах , диапазон его регулирования и допустимая относительная нестабильность 2 U2 доп  U2 ; мак-
U2 ; мак-
симальный (он же номинальный) ток IН нагрузки и диапазон его изменений IН (обычно принимают IН min = 0 и IН = IН max , иначе СТ может выйти из строя при
33

холостом ходе или в моменты включения при индуктивном характере нагруз-
ки); выходное сопротивление |
Rв ых dU2 |
dIН |
U |
const ; |
коэффициент стаби- |
|
|
|
|
|
1 |
|
|
лизации K U2dU1 U1dU2 R |
Н |
const ; коэффициент |
полезного действия |
|||
|
|
|
|
|
|
|
U2 maxIн max  (U1номI1ном ) (U1 ном , I1 ном – номинальные входные напряжение и ток). Временной (температурный) дрейф характеризуют абсолютным либо относительным изменением выходного напряжения за определенное время (в определенном диапазоне температур).
(U1номI1ном ) (U1 ном , I1 ном – номинальные входные напряжение и ток). Временной (температурный) дрейф характеризуют абсолютным либо относительным изменением выходного напряжения за определенное время (в определенном диапазоне температур).
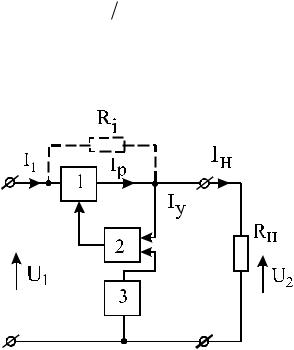
СТ бывают параллельного и последовательного типов. Параллельный СТ (рис.2.3, б) содержит регулирующий 1 и опорный 3 элементы, сравнивающий и усилительный элемент 2. В нем при пренебрежении током через внутреннее
сопротивление Ri |
элемента 1 выполняется условие |
IУ IР IН |
|
(U1 U 2 ) R0 , откуда [4] |
|
|
|
IУ IР IН |
( U1 U2 ) R0 , |
(2.5) |
|
где IУ , IР , IН , U1 , U2 – приращения (изменения) соответственно токов сравнивающего, регулирующего элементов и нагрузки, входного и выходного
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
напряжений. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В реальных СТ IУ << IР. С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
учетом этого при U1 = U2 = 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(неизменное входное и идеальная |
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
стабилизация выходного напря- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
1 |
R0 |
|
|
|
|
|
|
|
|
|
жений) из выражения (2.5) следу- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iр |
Iу Iн |
|
ет IР = – IН , т.е. токи нагрузки |
|
|
|
R |
|
|
|
2 |
Rн |
U2 |
и регулирующего элементов из- |
|||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
||||||||||||
U1 |
|
|
|
меняются противоположно. |
Если |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||
i |
|
|
|
|
1 |
|
|
|||||||||
|
|
|
||||||||||||||
|
|
|
|
|
|
|
же IН = const, то IР U1 |
|
||||||||
|
|
|
|
|
|
3 |
|
|
R0 – |
|||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||
б
Рис. 2.3. Функциональные схемы cтабилизатров напряжения:
а – общая; б – параллельного типа
изменение тока прямо пропорционально приращению напряжения U1. Из этого вытекает, что минимальный ток IР min регулирующего элемента соответствует
34
максимальному току IН max нагрузки и минимальному входному напряжению U1 min . Тогда при U1 U1ном
IР ном IP min (U1ном U1min ) R0 .
R0 .
Очевидно, IР ном >> IР min, если сопротивление R0 СТ мало. Максимальный ток IР max , по которому подбирают элемент 1, соответствует режиму холостого хода и напряжению U1 max :
IР max IP min IН max (U1max U1min ) R0 (U1max U1min )
R0 (U1max U1min ) R0 I1min ,
R0 I1min ,
где I1 min = IР min + IН max – минимальный входной ток параллельного СТ.
Полагая в (2.5) U1 |
= 0, подставляя IУ U 2 RУ и IР Ki |
IУ , прихо- |
дим к выражению для выходного сопротивления СТ |
|
|
Rв ых R0 || R , |
|
(2.6) |
где R RУ ( 1 Ki ) – |
так называемое характеристическое сопротивление, |
|
равное выходному сопротивлению активной части СТ (при R0 || Ri |
); |
|
RУ – суммарное входное сопротивление элемента 2 с учетом элемента 3; Ki – суммарный коэффициент усиления тока элементов 2 и 1.
Часто R0 R |
|
. Тогда Rв ых R . |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляя в (2.5) |
IУ U 2 |
RУ , IР Ki IУ |
и I Н |
|
U 2 |
RН , можно |
||||||||
получить |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
U2 |
|
U1 |
|
U2 |
|
R0 |
|
. |
|
|
|
(2.7) |
|
|
U2 |
|
|
|
|
|
|
|||||||
|
U1 |
|
|
U1 |
R0 || RН || R |
|
|
|
|
|||||
В большинстве случаев R0( Н ) R , поэтому K U2 R0  (U1R ), т.е. для увели-
(U1R ), т.е. для увели-
чения коэффициента стабилизации надо уменьшать характеристическое сопротивление. Это же необходимо для снижения выходного сопротивления. Требуемое достигают повышением коэффициента Ki усиления.
На практике часто применяют простейший параллельный СТ напряжения, называемый параметрическим [5] (рис. 2.4, а). Стабилитрон VD совмещает функции опорного и регулирующего элементов. Колебания напряжения U1 или
35
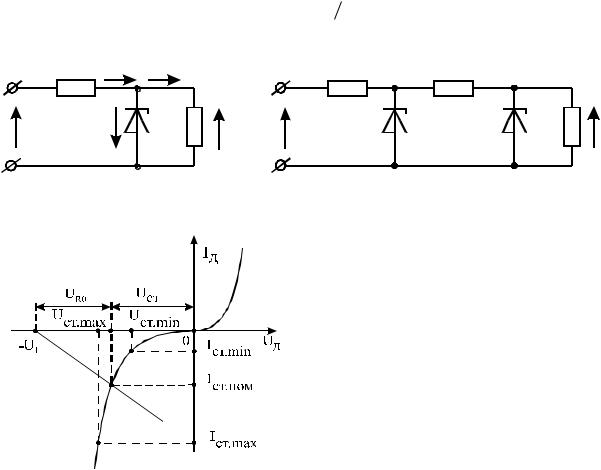
тока IН приводят к изменению тока Iд = Iст , но напряжение U2 = Uст изменяется незначительно: Uст const. Поэтому U1 = UR0 и Iст U1  R0 , где U1 ,UR0 , Iст – изменения соответственно напряжений U1, UR0 и тока Iст стабилитрона; R0 – балластное сопротивление (рис. 2.4, в).
R0 , где U1 ,UR0 , Iст – изменения соответственно напряжений U1, UR0 и тока Iст стабилитрона; R0 – балластное сопротивление (рис. 2.4, в).
Для рассматриваемого диодного СТ справедливы соотношения (2.5 – 2.7) при Ki = 0 и
RУ rд U ст  Iст (U ст max Uст min )
Iст (U ст max Uст min ) ( Iст max Iст min ) ,
( Iст max Iст min ) ,
где rд – дифференциальное сопротивление стабилитрона, который подбирают исходя из значений напряжения U2 и тока IН . Очевидно, при Ki = 0 R = rд, т.е.
в диодных СТ характеристическое сопротивление является величиной задан-
ной. Соответственно Rв ых rд и K U 2 R0 |
(U1rд ). Ток Iст min выбирают в преде- |
|||||||||
+ |
R0 I1 |
Iн |
|
R01 |
|
R02 |
|
|
|
|
|
|
Rн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rн |
|
|
U1 |
Iд |
|
U2 |
U |
VD1 |
|
VD2 |
|
U2 |
|
|
|
|
|
|
|
|||||
- |
|
VD |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
а
в
Рис. 2.4. Параметрические стабилизаторы напряжения:
а, б – схемы; в – характеристики
б
лах 2…3 мА для маломощных и 3…5 мА для мощных стабилитронов. Сопротивление rд , зависящее от тока Iст , принимают равным номинальному (среднему) значению. Исходя из допустимого тока Iст доп оценивают максимальный ток нагрузки.
Диодные СТ просты и надежны, но их недостатками являются невозможность регулировки выходного напряжения и невысокий коэффициент стабилизации (порядка 15…50), особенно при больших токах нагрузки IН > Iст ном . Воз-
36
можный способ увеличения параметра K – применение каскадных схем (рис. 2.4, б). Расчет такого СТ выполняется “справа налево” [4]. Выходное сопротивление определяется стабилитроном VD2. Диодные СТ применяются в основном в качестве источников опорного напряжения в более мощных СТ и для питания слаботочных схем, например, цепей смещения. В этом случае удается обеспечить условие IН max Iст min , при котором стабильность может быть приемлемой. Температурный и временной дрейф параметрического СТ такой же, как у отдельного стабилитрона. В широком интервале температур дрейф напряжения U2 доходит до 10% и более, т.е. намного превышает нестабильность напряжения U1 и тока IН . Анализ показывает [4], что однокаскадный параллельный СТ (содержит однокаскадный регулирующий элемент) не имеет преимуществ перед диодным, а двухкаскадный (с двухкаскадным регулирующим элементом) уступает двухкаскадному последовательному СТ.
Последовательный СТ (рис.2.5) напряжения содержит регулирующий 1 и опорный 3 элементы, сравнивающий и усилительный элемент 2. В нем выполняется условие [4] IУ IН IР (U1 U2 ) Ri (Ri – внутреннее сопротивление элемента 1), откуда для приращений
Ri (Ri – внутреннее сопротивление элемента 1), откуда для приращений
IУ IН IР ( U1 U2 ) Ri . |
(2.8) |
В реальных СТ IУ << IН . С учетом этого при U1 = U2 = 0 следует IР =IН , т.е. ток регулирующего элемента повторяет изменение тока нагрузки. Если
Рис. 2.5. Функциональная схема стабилизатора напряжения последовательного типа
37

же IН = const, то IР U1  Ri – изменение тока элемента 1 противоположно изменению тока через сопротивление Ri, которым принципиально нельзя пренебрегать. Из этого следует, что в последовательном СТ максимальный ток IР max регулирующего элемента соответствует максимальному току IН max нагрузки и минимальному входному напряжению U1 min.: I U2 )
Ri – изменение тока элемента 1 противоположно изменению тока через сопротивление Ri, которым принципиально нельзя пренебрегать. Из этого следует, что в последовательном СТ максимальный ток IР max регулирующего элемента соответствует максимальному току IН max нагрузки и минимальному входному напряжению U1 min.: I U2 ) Ri
Ri
(часто с запасом принимают I Р max I Н max ). Последовательный СТ не может ра-
ботать в режиме холостого хода (в этом случае IР < 0). Для нормального функционирования через элемент 1 должен протекать минимальный (остаточный) ток IР min IН min (U1max U2 ) Ri . Ток IН min обеспечивают подключением на выходе постоянного сопротивления (шунта). Тогда по отношению к внешней нагрузке холостой ход допустим, но под током IН max надо понимать сумму токов собственно нагрузки и шунта IШ = IН min . В рабочем режиме напряжение на регулирующем элементе UР = U1 – U2 . Но в момент включения (с учетом емкости на выходе) и при коротком замыкании UР = U1 , из-за чего регулирующий элемент выбирают из условия UР max = U1 max .
Ri . Ток IН min обеспечивают подключением на выходе постоянного сопротивления (шунта). Тогда по отношению к внешней нагрузке холостой ход допустим, но под током IН max надо понимать сумму токов собственно нагрузки и шунта IШ = IН min . В рабочем режиме напряжение на регулирующем элементе UР = U1 – U2 . Но в момент включения (с учетом емкости на выходе) и при коротком замыкании UР = U1 , из-за чего регулирующий элемент выбирают из условия UР max = U1 max .
Полагая в (2.8) U1 = 0, IУ U 2 |
RУ и IР Ki |
IУ , имеем [4] |
|||||||||
Rв ых Ri || R , |
|
|
|
|
|
(2.9) |
|||||
где параметры R RУ |
( 1 Ki ) , RУ , Ki |
аналогичны параметрам параллельного |
|||||||||
СТ, а подставляя сюда же IН U2 |
RН |
и те же IР и IУ , находим коэффици- |
|||||||||
ент стабилизации |
|
|
|
|
|
|
|
|
|||
K |
U2 |
|
U1 |
|
U2 |
|
|
Ri |
. |
|
(2.10) |
U1 |
U2 |
U1 |
Ri |
|| RН || R |
|
||||||
|
|
|
|
|
|
|
|||||
В последовательных |
СТ, |
как и |
в |
параллельных, |
Ri( Н ) R . Поэтому |
||||||
KU2 Ri  (U1R ). Из-за неидеальных свойств регулирующего элемента Ri ,
(U1R ). Из-за неидеальных свойств регулирующего элемента Ri ,
икоэффициент стабилизации имеет конечное значение.
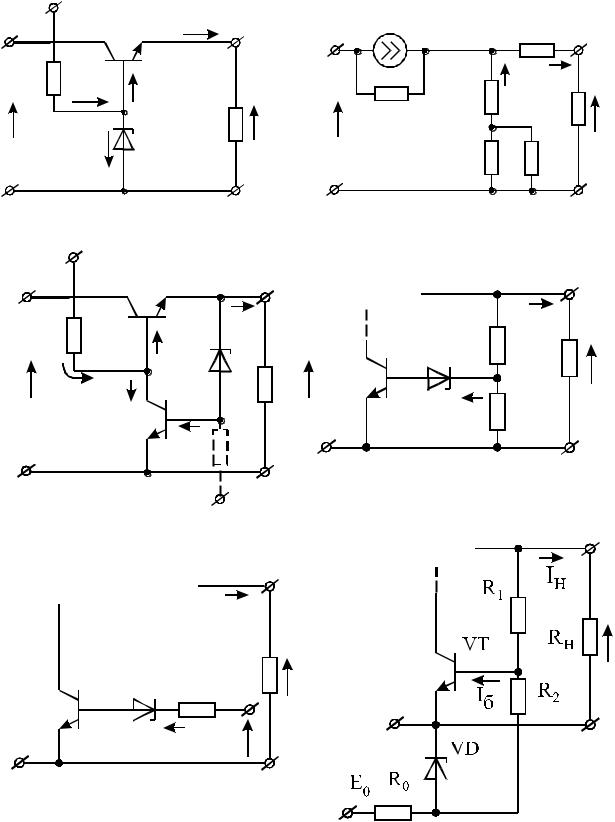
Однокаскадный последовательный СТ и его малосигнальная эквивалентная схема приведены на рис. 2.6, а, б. Усилительная часть представлена транзистором VT, опорная – стабилитроном VD, стабилизированным напряжением Е0 и балластным сопротивлением R0 . По-существу, СТ представляет собой эмит-
38

терный повторитель, потенциал базы которого стабилизирован, а напряжение коллекторного питания изменяется в широких пределах.
Сравнивая схемы |
рис. 2.5 и рис. 2.6, а, б, устанавливаем: |
I Р I К , |
||
RУ rБ R0 || rд rБ rд , |
Rв ых R rЭ ( rд rБ ) (1 ) , |
K U2 Ri |
(U1R ) = |
|
U r |
(U R ) , где rЭ , rБ , r , – параметры транзистора VT в схеме с ОЭ (см. |
|||
2 К |
1 |
К |
|
|
подразд. 1.3); rд – дифференциальное сопротивление стабилитрона VD. Количественные расчеты показывают, что при средних значениях параметров транзисторов средней мощности rК = 5 кОм, rБ = 20 Ом, = 30, IК = 0,25 А и rд = 10
Ом выходное сопротивление и коэффициент стабилизации примерно равны 1 Ом и 125 раз. Величина K приемлема, но Rвых сравнительно велико и ограничивает максимальный ток нагрузки в однокаскадном СТ.
В рассматриваемом СТ напряжение Е0 предполагалось абсолютно постоянным. На практике диодный СТ питается от того же источника. ОбозначивЕ0 = h U1 (h < 1) и включив этот источник переменного напряжения последовательно с сопротивлением R0 , можно показать [4], что коэффициент стабилизации уменьшается в (1+ hrд Ri  ( R0 R )) раз. Наиболее часто балластное сопро-
( R0 R )) раз. Наиболее часто балластное сопро-
тивление R0 подключают ко входу СТ напрямую, что резко снижает значение K. Действительно, в этом случае изменения выходного и опорного напряжений примерно одинаковы (изменением напряжения база – эмиттер транзистора VT пренебрегаем). Поэтому коэффициент стабилизации СТ близок к аналогичному опорной части, который по причине небольшого значения R0 (100…300 Ом) не превышает 10…20.
Основной недостаток однокаскадного последовательного СТ – сравнительно большое выходное сопротивление. Лучшие свойства имеет двухкаскадный СТ (рис. 2.6, в), в котором транзистор VT1 является регулирующим элементом, а транзистор VT2 – сравнивающим и усилительным. В этом случае [4]
IР IК 1 , RУ rд Rв х2 rд rБ 2 ( 1 2 )rЭ 2 , Ki 1 2 и R =
( rд Rв х2 ) ( 1 1 2 ) , где IК1, 1 – ток коллектора транзистора VT1 и коэффи-
( 1 1 2 ) , где IК1, 1 – ток коллектора транзистора VT1 и коэффи-
циент передачи его тока в схеме с ОЭ; Rвх2 , rБ2 , rЭ2 , 2 – входное сопротивление и параметры транзистора VT2; rд – дифференциальное сопротивление стабилитрона VD. Например, при IК2 = 10 мА, rБ2 = 50 Ом, 1 = 2 = 30 и rд =10 Ом
39
имеем Rвых 0,15 Ом. Выигрыш по сравнению с однокаскадной схемой значительный. Соответственно возрастает и коэффициент стабилизации: K 1000.
|
|
|
VT |
Iн |
|
б |
Б’ |
|
Iн |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
R0 |
|
|
|
|
|
|
|
rэ |
|
|
U |
|
|
VD |
Rн |
|
U1 |
* |
|
rб |
Rн |
U2 |
|
|
|
U |
rк |
|
|
|
||||
1 |
|
|
|
|
2 |
|
|
|
rд |
R |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
а |
|
|
|
б |
|
|
|
|
|
|
+E 0 |
VT1 |
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R0 |
|
VD Iн |
|
VT VD |
|
|
Iн |
|
|
|
|
|
Iб1 |
|
|
|
R1 |
U2 |
|||
|
|
|
Rн |
U |
|
|
|
Rн |
|||
U1 |
I |
|
|
VT2 |
|
|
|
||||
0 Iк2 |
|
2 |
I |
|
R2 |
|
|||||
|
|
|
Rд |
|
|
|
|||||
|
|
|
|
Iб2 |
|
д |
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-E д |
|
|
|
|
|
|
|
|
|
в |
|
|
|
г |
|
|
|
|
Iн
|
|
Rн |
|
|
|
|
U2 |
VT VD |
Rдел |
U2 |
|||||
|
I |
U2 |
|
|
|
|
|
|
|
|
|
|
|
||
|
д |
|
|
|
|
|
|
|
д |
|
|
|
|
|
е |
|
|
|
|
|
|
||
|
|
|
|
|
|
||
Рис. 2.6. Схемы последовательных стабилизаторов на дискретных элементах
40