

Sluchaynye_protsessy
.pdfЕсли эта величина сходится, то на основании критерия Коши сходимости в среднем квадра- тичном [ ] мы сможем утверждать, что выполняется сходимость (4.2). Как и раньше, найдём
математическое ожидание квадрата случайной величины
= Dæç x(t +
è
- æ x(t
2covç
è
|
æ |
æ x(t + h) - x(t) |
- |
x(t + k) - x(t) ö |
2 ö |
|
= |
|
|
|
|
|
||||||
Eç |
ç |
h |
|
|
k |
÷ |
÷ |
|
|
|
|
|
|
|||||
|
ç |
è |
|
|
|
|
ø |
÷ |
|
|
|
|
|
|
|
|||
h)- x(t) |
è |
|
|
|
|
|
|
|
|
|
ø |
|
|
|
|
|
|
|
- |
|
x(t + k) - x(t) ö |
+ |
|
æ x(t + h) - x(t) |
- |
x(t + k) - x(t) ö |
= |
||||||||||
h |
|
|
k |
÷ |
E2ç |
h |
|
|
k |
÷ |
||||||||
|
|
|
ø |
|
|
è |
|
|
|
|
ø |
|
|
|||||
= |
æ x(t + h) - x(t) ö |
|
|
æ x(t + k) - x(t) ö |
- |
|
|
|
||||||||||
Dç |
h |
÷ |
+ Dç |
k |
|
|
÷ |
|
|
|
||||||||
|
è |
ø |
|
è |
|
|
ø |
|
|
|
|
|
||||||
+ h) - x(t) x(t + k) - x(t) ö |
|
|
æ aξ (t + h) - aξ |
(t) |
|
|
aξ (t + k) - aξ (t) ö2 |
|||||||||||
|
, |
|
|
|
|
|
ç |
|
|
|
|
- |
|
|
|
÷ |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
h |
|
k |
÷ + ç |
|
h |
|
|
k |
|
÷ . |
||||||||
|
|
|
ø |
|
|
è |
|
|
|
|
|
|
ø |
|||||
Последующие преобразования проиллюстрируем на примере одного слагаемого:
æ x(t + h) - aξ (t) ö |
|
Rξ (t + h,t + h) - Rξ (t,t) - 2Rξ (t + h,t) |
|
|||
ç |
|
÷ |
= |
|
|
. |
|
|
2 |
||||
Dç |
h |
÷ |
h |
|||
è |
ø |
|
|
|
||
Видно, что это выражение есть определение смешанной производной второго порядка от ко- вариационной функции в точке (t, t), если только эта производная существует. Таким обра- зом, если производная существует, то
æ x(t + h) - aξ (t) ö |
|
¶2 |
|
|
|
|
||
|
|
|
|
|
||||
ç |
|
÷ |
® |
|
Rξ (t1,t2 ) |
|
|
. |
|
|
|
|
|||||
Dç |
h |
÷ |
¶t1¶t2 |
|
|
|||
è |
øh→0 |
|
t1 |
=t2 |
=t |
|||
|
|
|
|
|
|
|||
Выполнив аналогичные преобразования для остальных слагаемых, можно показать, что
æ |
æ x(t + h) - x(t) |
- |
x(t + k) - x(t) ö2 |
ö |
|
® |
0 , |
|||||||||
Eç |
ç |
h |
|
|
|
k |
|
÷ |
÷ |
|
||||||
ç |
è |
|
|
|
|
|
|
ø |
÷h,k →0 |
|
||||||
è |
|
|
|
|
|
|
|
|
|
|
ø |
|
|
|
|
|
если только существуют производные |
d |
a |
ξ |
(t), |
¶2 |
|
R (t ,t |
|
) |
|
|
существуют. |
||||
|
|
|
|
|||||||||||||
dt |
¶t ¶t |
|
|
|||||||||||||
|
|
|
|
|
|
ξ 1 |
|
2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
t1 =t2 =t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
4.3. Дифференцируемость стационарного случайного процесса
Теорема. Стационарный в широком смысле процесс ξ(t) дифференцируем в среднем
квадратичном тогда и только тогда, когда существует вторая производная его ковариацион- ной функции в нуле, т. е. существует
dt22 Rξ (t) τ=0 .
d
Действительно, так как процесс стационарный, то aξ (t) = c = const, т. е. математическое ожидание дифференцируемо в любой точке t . Ковариационная функция стационарного про- цесса обладает свойством Rξ (t1,t2 ) = Rξ (t1 − t2 ) = Rξ (τ) . В таком случае
31
¶2 |
|
¶2 |
|
¶ |
æ |
¶ |
ö |
|
|||
|
|
|
|
|
|
|
ç |
|
|
÷ |
|
¶t ¶t |
|
Rξ (t1,t2 ) = ¶t ¶t |
|
Rξ (t1 - t2 ) = ¶t |
¶t |
|
= |
||||
2 |
2 |
ç |
2 |
Rξ (t)÷ |
|||||||
1 |
1 |
1 |
è |
|
ø |
|
|||||
¶ æ |
¶R (t) |
|
¶t ö |
¶ æ |
¶R (t) ö |
¶2 |
|
||||||||
|
|
ç |
ξ |
|
|
|
÷ |
|
|
ç |
ξ |
÷ |
|
|
|
= ¶t |
¶t ¶t |
|
= - ¶t |
¶t |
= - ¶t2 Rξ (t) , |
||||||||||
ç |
2 |
÷ |
ç |
÷ |
|||||||||||
1 |
è |
|
|
|
ø |
1 |
è |
|
ø |
|
|
|
|||
и условие существования смешанной производной второго порядка на диагонали для неста- ционарного процесса сводится к условию существования производной второго порядка в ну- ле для стационарного процесса.
Пример. Дифференцируем ли в среднем квадратичном случайный процесс с ковариаци- онной функцией вида Rξ (t) = s2ξe−α τ ?
Решение. Перепишем ковариационную функцию в виде
Rξ (t)
Дифференцирование дает
|
|
|
ì |
2 |
e |
−ατ |
,t ³ 0, |
|
|
|
|
|
s |
ξ |
|
||
|
|
|
|
|
||||
= sξ2e−α |
|
τ |
|
ï |
|
|
|
|
|
|
= í |
2eατ ,t < 0. |
|||||
|
|
|||||||
|
|
|
|
ïs |
||||
|
|
|
î |
ξ |
|
|
|
|
d |
|
ì |
2 |
−ατ |
, t ³ 0, |
|
ï- asξe |
|
|||
|
R (t) = í |
|
|
|
|
dt |
|
|
|
||
ξ |
ïas2eατ ,t < 0. |
||||
|
|
î |
ξ |
|
|
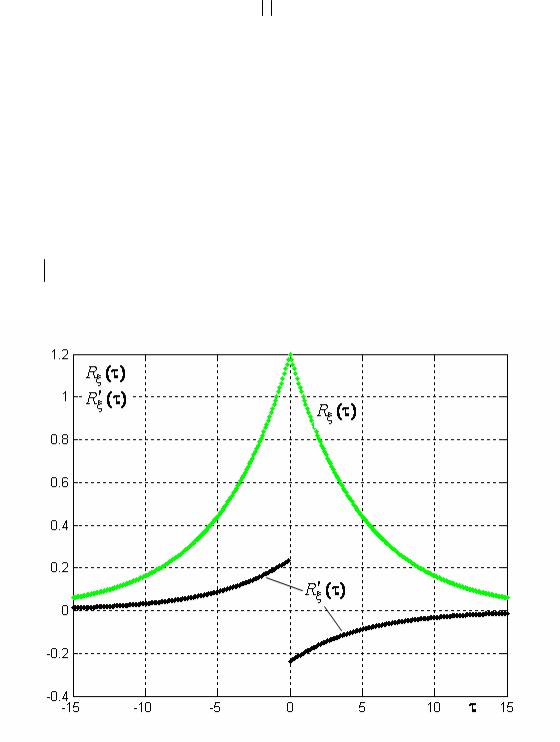
Ковариационная функция и ее производная представлены на рис. 4.1. Мы видим, что произ- водная Rξ′ (τ) в точке τ = 0 имеем разрыв первого рода, следовательно, вторая производная
R′′(τ) τ=0 в этой точке не существует, и такой процесс не дифференцируем в среднем квад- ратичном.
32
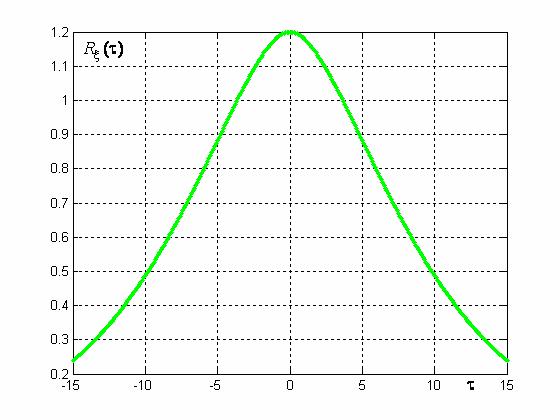
Рис. 4.1. Ковариационная функция (1.13) и ее производная
Пример 2: Дифференцируем ли в среднем квадратичном стационарный случайный про-
цесс с ковариационной функцией вида
R (t) = s2 |
(1 + a | t |)e−α|τ| |
? |
(4.3) |
|
ξ |
ξ |
|
|
|
Решение. Перепишем ковариационную функцию в виде
|
|
|
|
ì |
2 |
(1+ at)e |
−ατ |
,t ³ 0, |
2 |
|
|
−α|τ| |
s |
ξ |
|
||
(1 |
+ a | t |)e |
ï |
|
|
|
|||
Rξ (t) = sξ |
|
= í |
|
(1- at)eατ ,t < 0. |
||||
|
|
|
|
ïs2 |
||||
|
|
|
|
î |
ξ |
|
|
|
|
|
|
|
|
|
′ |
|
|
|
|
|
|
|
|
|
|
Дифференцируя эту функцию, получим Rξ (τ) |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
ì |
|
2 |
2 |
−ατ |
, t ³ 0, |
|
|
|
|||
|
|
|
|
¢ |
ï- a |
|
sξte |
|
|
|
|
|
||||
|
|
|
|
(t) = í |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rξ |
|
2s2teατ ,t < 0. |
|
|
|
||||||||
|
|
|
|
|
ï- a |
|
|
|
||||||||
|
|
|
|
|
î |
|
|
ξ |
|
|
|
|
|
|
|
|
|
ì |
2 |
2 |
(1 |
- at)e |
−ατ |
, t ³ 0, |
|
|
|
|
|
|
|
||
¢¢ |
ï- a |
|
sξ |
|
|
|
2 |
2 |
|
- a | t |)e |
−α|τ| |
|||||
(t) = í |
|
|
|
|
|
|
|
|
= -a |
(1 |
||||||
Rξ |
2s2 |
(1 |
+ at)eατ ,t < 0, |
|
|
sξ |
|
|||||||||
|
ï- a |
|
|
|
|
|
|
|
|
|||||||
|
î |
|
ξ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Мы видим, что вторая производная R′′(τ) в точке τ = 0 существует и равна
.
- a2sξ2 . Сле-
довательно, случайный процесс с такой ковариационной функцией дифференцируем в сред- нем квадратичном. Ковариационная функция (4.3) изображена на рис. 4.2, а ее производные
– на рис. 4.3.
Рис. 4.2. Ковариационная функция (4.3)
33
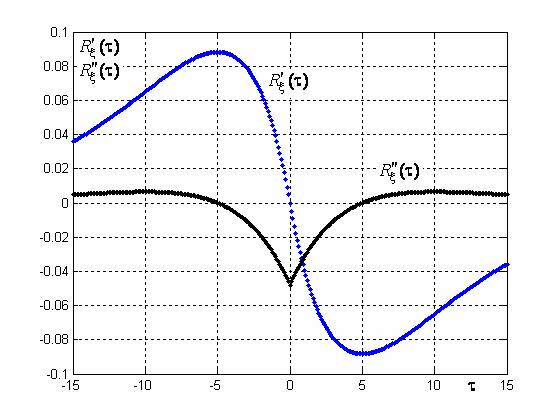
Рис. 4.3. Первая и вторая производные ковариационной функции (4.3)
4.4. Производная в среднем квадратичном случайного процесса
Пусть ξ′(t) – производная в среднем квадратичном процесса ξ (t), aξ (t) – математиче- ское ожидание процесса ξ(t) , Rξ (t1,t2 ) – ковариационная функция процесса. Нас интере- суют математическое ожидание aξ (t) = E(ξ′(t)) и ковариационная функция Rξ′ (t1,t2 )
производной ξ′(t) этого процесса.
Теорема. Математическое ожидание и ковариационная функция производной в среднем
квадратичном случайного процесса определяются выражениями |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
′ |
|
d |
|
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
aξ′ (t) = aξ (t) = |
dt |
aξ (t), |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
∂2 |
|
|
|
|
|
|
|
|
|||
|
|
R |
(t ,t |
2 |
) = |
|
|
R (t ,t |
2 |
) . |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
ξ′ |
1 |
|
|
|
∂t1dt2 |
|
|
|
ξ |
1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Докажем эту теорему. Для математического ожидания производной получим |
|||||||||||||||||||
|
|
|
′ |
|
|
|
|
|
|
|
ξ(t + h) − ξ(t) |
) . |
|
|
|||||
|
aξ′ (t) = E(ξ (t)) = E(lim |
|
|
|
h |
|
|
||||||||||||
|
|
|
|
|
|
|
|
h→0 |
|
|
|
|
|
|
|
||||
Поскольку сходимость в среднем квадратичном обладает тем свойством, что символы E и |
|||||||||||||||||||
l.i.m. перестановочны [ ], то |
|
|
|
|
|
|
|
αξ |
(t + h) − αξ (t) |
|
|
|
|||||||
aξ′ (t) = lim E( |
ξ(t + h) − ξ(t) |
) = lim ( |
|
) = |
d |
aξ (t) . |
|||||||||||||
h |
|
|
|
|
|
|
|
h |
|
dt |
|||||||||
h→0 |
|
|
|
|
|
h→0 |
|
|
|
|
|
|
|
|
|||||
Итак, мы доказали, что
34

E(dtd ξ(t)) = dtd E(ξ(t)) .
Мы видим, что операции E и d / dt в среднем квадратичном также перестановочны. Вос- пользуемся этим свойством для доказательства утверждения теоремы относительно ковариа- ционной функции производной:
|
|
|
|
d |
o |
d |
o |
|
|
∂ ∂ |
o |
o |
|
|
∂ |
2 |
|
|
|
|
|
|||||
R |
(t ,t |
|
) = E( |
ξ(t ) |
ξ(t |
|
)) = E( |
ξ(t ) ξ(t |
|
)) = |
|
|
R (t ,t |
|
) . |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
dt |
|
dt |
|
|
∂t ∂t |
|
|
∂t dt |
|
|
|||||||||||||||
ξ′ |
1 |
2 |
|
q |
1 |
2 |
|
2 |
|
2 |
|
1 |
2 |
|
2 |
ξ |
1 |
2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
||||
Теорема доказана.
Теорема. Математическое ожидание и ковариационная функция производной в среднем
квадратичном стационарного случайного процесса определяются выражениями
aξ′ (t) = 0 ,
Rξ′ (τ) = − d 2 Rξ (τ) .
dτ2
Результат этой теоремы вытекает из предыдущей теоремы. Действительно, для стацио-
нарного случайного процесса aξ (t) = const, поэтому всегда |
d |
aξ (t) = 0. Кроме того, для |
|||||||||||
dt |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
стационарного |
|
случайного |
процесса |
Rξ (t1,t2 ) = Rξ (t1 − t2 ) = Rξ (τ) |
и |
||||||||
|
∂2 |
|
R (t ,t |
|
) = − |
∂2 |
R (τ) . Теорема доказана. |
|
|
|
|
||
|
∂t dt |
|
|
∂τ2 |
|
|
|
|
|||||
|
2 |
ξ 1 |
2 |
|
ξ |
|
|
|
|
|
|||
1 |
|
|
|
|
|
|
|
|
|
|
|||
Из последней теоремы следует, что производная в среднем квадратичном стационарного случайного процесса так же является стационарным случайным процессом, поскольку ее ма- тематическое ожидание не зависит от времени (равно нулю) и ковариационная функция за- висит лишь от одного аргумента τ .
4.5. Интегрируемость случайного процесса
Интеграл Римана от любой неслучайной функции определяется как предел соответст- вующей интегральной суммы Римана. Интеграл от случайного процесса можно определить как предел в среднем квадратичном такой же интегральной суммы Римана.
Дадим определение интеграла в среднем квадратичном вида
|
b |
|
|
I = ò g(t)ξ(t)d(t) , |
|
где ξ(t) |
a |
|
– случайный процесс, g(t) – детерминированная функция. Для этого рассмотрим |
||
интегральную сумму Римана |
|
|
|
m |
−ti ) , t' (ti ,ti+1) . |
|
sm = å g(t')ξ(t')(ti+1 |
|
|
i =1 |
|
Предел |
в среднем квадратичном интегральной суммы sm при m → ∞ и |
|
max(ti+1 − ti ) → 0 , если он существует, называется интегралом в среднем квадратичном и обозначается обычным способом:
b
I = ò
a
g(t)ξ(t)dt = |
l.i.m. sm . |
|
m→∞ |
|
max(t i+1−ti )→0 |
35
Теорема. Если случайный процесс ξ(t) и детерминированная функция g(t) таковы, что
существуют интегралы
b
P = ò g(t)aξ (t)dt ,
a
b b
Q = ò ò g(t1)g(t2 )Rξ (t1,t2 )dt1dt2 ,
a a
где aξ (t) – математическое ожидание случайного процесса ξ(t) , Rξ (t1,t2 ) – ковариацион-
ная функция случайного процесса ξ(t) , то данный случайный процесс интегрируем в сред- нем квадратичном, причем
|
|
æb |
ö |
|
|
|
|
ç |
÷ |
, |
|
P = E(I ) = Eç ò g(t)x(t)dt ÷ |
|||||
|
|
èa |
ø |
|
|
2 |
æ |
æb |
ö |
2 ö |
|
ç |
ç |
÷ |
÷ |
||
Q = E(I ) = Eç |
÷. |
||||
ç ò g(t)x(t)dt ÷ |
|||||
|
è |
è a |
ø |
ø |
|
Теорема. Стационарный случайный процесс ξ(t) |
интегрируем в среднем квадратичном |
||||
тогда и только тогда, когда существуют интегралы
b
P = ò g(t)x(t)dt ,
a
Q = òò g(t1)g(t2 )Rξ (t1 - t2 )dt1dt2 ,
где Rξ (t1 − t2 ) = Rξ (τ) – ковариационная функция стационарного случайного процесса. Данная теорема вытекает из предыдущей.
4.6. Интеграл от случайного процесса с переменным верхним пределом
На практике очень часто приходиться иметь дело с интегралом вида
t
η(t) = ò g(v)ξ (v)dv ,
a
где ξ (v) – случайный процесс, g(v) – неслучайная функция. Этот интеграл является функ- цией верхнего предела, т. е. случайным процессом η(t) . Будем понимать этот интеграл в
среднем квадратичном смысле.
Теорема. Математическое ожидание и ковариационная функция интеграла в среднем квадратичном с переменным верхним пределом от случайного процесса ξ (t) определяются
выражениями
t
aη (t) = E(η(t)) = ò g(v)aξ (v)dv ,
a
t1 t2
Rη (t1, t2 ) = ò ò g(v1)g(v2 )Rξ (v1, v2 )dv1dv2 ,
a a
36
где aξ (t), Rξ (t1,t2 ) – математическое ожидание и ковариационная функция процесса ξ (t).
Данная теорема является интерпретацией предыдущей теоремы в случае, когда верхний предел интегрирования является переменным.
Теорема. Математическое ожидание и ковариационная функция интеграла в среднем квадратичном с переменным верхним пределом от стационарного случайного процесса ξ (t)
определяются выражениями
t
aη (t) = E(η(t)) = ò aξ g(v)dv ,
a
t1 t2
Rη (t1, t2 ) = ò ò g(v1 )g(v2 )Rξ (v1 − v2 )dv1dv2 .
a a
Эта теорема является частным случаем предыдущей. Из этой теоремы видно, что интеграл
в среднем квадратичном с переменным верхним пределом от стационарного случайного процесса стационарным не является, так как его математическое ожидание не является по-
стоянным, и ковариационная функция зависит от двух аргументов t1 , t2 .
37
5. ДИНАМИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ СЛУЧАЙНЫХ ПРОЦЕССОВ
5.1. Прохождение нестационарного случайного процесса через линейную стационарную динамическую систему
Пусть процесс ξ(t) с математическим ожиданием aξ (t) и ковариационной функцией
Rξ(t1,t2) подается на вход линейной динамической системы. Нас интересуют математиче-
ское ожидание aη (t) и ковариационная функция Rη (t1,t2) процесса η(t) на выходе ди-
намической системы.
Любая стационарная динамическая система описывается импульсной переходной функ- цией k(t) , причем, для физически реализуемых динамических систем k(t) = 0 при t < 0 . Импульсная переходная функция k(t) является реакцией системы на входное воздействие в
виде дельта-функции δ(t) . Выходной сигнал динамической системы определяется как ин-
теграл свертки
∞
η(t) = ò k(t)ξ(t − τ)dτ .
0
Будем считать систему устойчивой, т. е. будем считать, что этот интеграл существует в среднем квадратичном.
Теорема. Для устойчивой стационарной динамической системы математическое ожидание и ковариационная функция выходного процесса η(t) , а также взаимная ковариационная
функция входного и выходного процессов определяются выражениями
∞
aη (t) = ò k(t)αξ (t − τ)dτ,
0
∞∞
Rη (t1,t2 ) = ò ò k(v)k(w)Rξ (t1 − v,t2 − w)dvdw ,
0 0
∞
Rξ,η(t1,t2 ) = ò k(τ)Rξ (t1,t2 − τ)dτ ,
0
где aξ (t) , Rξ(t1,t2) – математическое ожидание и ковариационная функция входного про- цесса.
5.2. Прохождение стационарного случайного процесса через линейную стационарную динамическую систему
Теорема. Если входной процесс ξ(t) устойчивой стационарной динамической системы стационарен, то математическое ожидание и ковариационная функция выходного процесса η(t) , а также взаимная ковариационная функция входного и выходного процессов опреде-
ляются выражениями
∞ |
|
aη (t) = αξ òk(t)dt = const , |
(5.1) |
0 |
|
38

|
∞∞ |
|
|
|
|
|
|
Rη (t1,t2 ) = |
ò ò k(v)k(w)Rξ (t1 − v − t2 |
+ w)dvdw = Rη(t1 |
− t2 ), |
(5.2) |
|||
|
0 0 |
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Rξ,η(t1,t2 ) = |
ò k(τ)Rξ (t1 |
− t2 |
+ τ)dτ = Rξ,η(t1 − t2 ) . |
|
|
||
|
|
0 |
|
|
|
|
|
Мы видим, что выходной процесс в этом случае является стационарным, а входной и выход- ной – стационарно связанными, поскольку математическое ожидание выходного процесса не зависит от времени, ковариационная функция выходного процесса зависит только от разно-
сти t1 − t2 и взаимная ковариационная функция входного и выходного процессов зависит только от разности t1 − t2 .
В случае стационарной системы и стационарного входного процесса удобнее оперировать не ковариационными функциями, а спектральными плотностями, и не импульсной переход- ной функцией, а частотной передаточной функцией системы.
Частотной передаточной функцией стационарной динамической системы называется пре- образование Фурье от ее импульсной переходной функции:
∞
W ( jω) = ò k(t)e− jωt dt .
0
Пусть Sξ (ω) – спектральная плотность входного процесса ξ(t) , а Sη (ω) – спектральная плотность выходного процесса η(t) . Найдем Sη (w) и aη . Из определения передаточной
функции получаем, что
∞
W (0) = òk(t)dt .
0
Подставляя это выражение в выражение (5.1), получим, что
aη = w(0)aξ .
Чтобы найти выражение для спектральной плотности Sη (ω) , найдем преобразования Фурье от обеих частей равенства (5.2):
S |
η |
(ω) = |
1 |
∞e− jωψ |
∞∞k(υ)k(ω)R (τ − υ + ω)dτdυdω = |
|
|
||||||
|
|
|
ò |
ò ò |
ζ |
|
|
|
|
2δ 0 |
0 0 |
|
|
= W ( jω)W (− jω)Sξ (ω).
Если учесть, что W ( jω)W (− jω)= W (jω)2 , то
Sη (ω)= W ( jω)2 Sξ (ω).
Пример. Пусть система описывается дифференциальным уравнением:
dη(t) |
+ Tη(t)= kξ(t) и Sξ (ω) = |
α |
||
dt |
|
(α2 + ω2 )π |
||
|
||||
Найдем спектральную плотность на выходе такой системы. Заменяя оператор дифференци- рования символом p , получим
pη(p)+ Tη(p)= kξ(p), (p + T )η(p)= kξ(p).
Отсюда W (p)= |
k |
, W (0)= |
k |
, так что |
T + p |
|
|||
|
T |
|
||
39
|
|
|
aη = |
k |
aξ , |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
T |
|
|
k 2α |
|
|
|
|||
Sη (ω)= |
k |
|
k |
|
|
|
α |
|
= |
|
|
|
. |
|||
(T + jω) (T − jω) π(α |
2 + ω2 ) |
π(T 2 |
+ ω2 )(α2 |
+ ω2 ) |
||||||||||||
|
|
|
||||||||||||||
40