Архив2 / курсач docx180 / Kursach(32)
.docxМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ
ФЕДЕРАЦИИ
БИЙСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ (филиал)
Федерального государственного бюджетного образовательного учреждения высшего
профессионального образования
«Алтайский государственный технический университет
им. И.И. Ползунова»
Факультет ИТАУ
Кафедра МСИА
Отчёт по курсовой работе
По курсу: «Моделирование в системах управления»
Выполнил: ст. гр. ПС-01
Курьят А.Е
Проверил: доц. кафедры МСИА
Максачук А. И.
Бийск 2012
|
Этап выполнения задания |
Замечания и рекомендации |
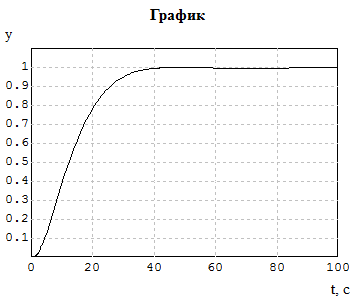
Объясните, почему функция бесконечно возрастает и стремится к прямой. Каков коэффициент наклона этой прямой? (5) |
Коэффициент наклона прямой:
|
|
2.Передаточная
функция измерительного устройства
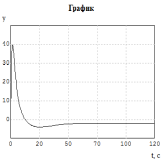
Переходная характеристику (время интегрирования 500) для полученной модели .(6) |
|
|
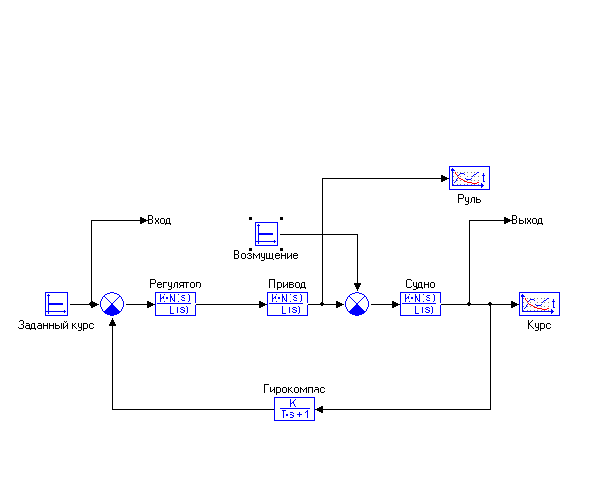
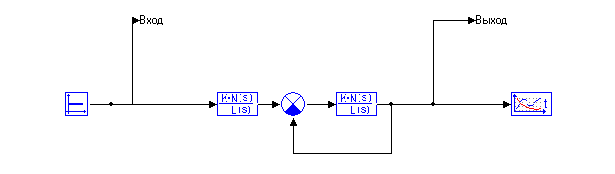
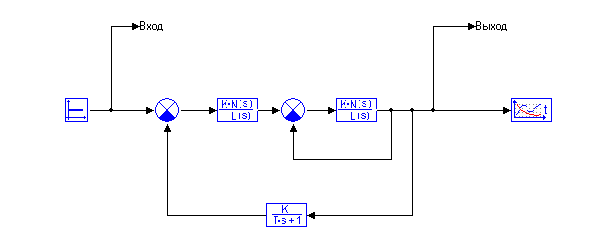
3. Преобразованная модель системы стабилизации судна. (7) |
|
|
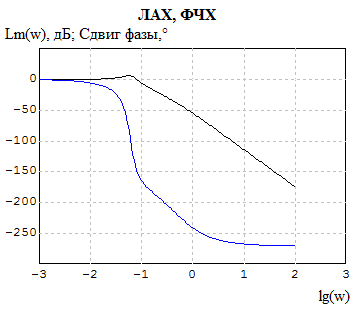
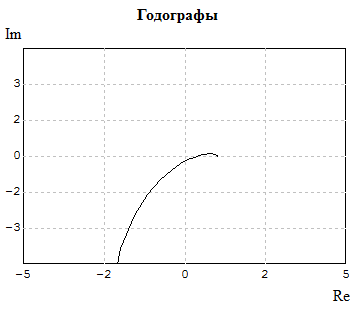
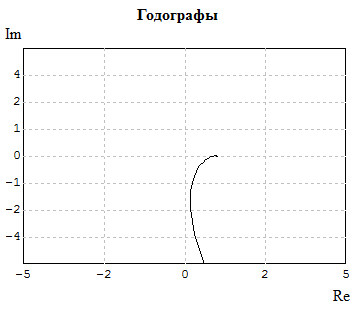
4. Запасы устойчивости по амплитуде и фазе. (10) |
γ L Система разомкнута: L=15 дБ, γ=400, Кус=100 дБ.
γ L Система замкнута: L=20 дБ, γ=300, Кус=2 дБ. Замкнутая система не устойчива. |
|
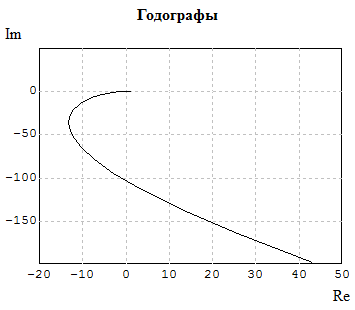
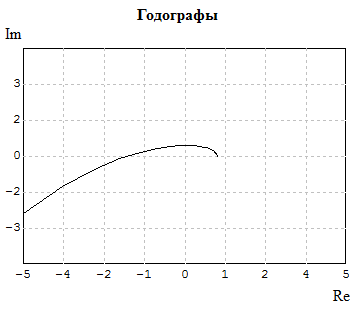
5. Оценка устойчивости САР по критерию Михайлова. (11) |
IV
I II
I II
IV
III III IV
K=1
I II
II
I
IV
IV III
III
K=4.2
I
I II
IV III
K=16.8
Система устойчива при K=1, т.к годограф вектора D(jw) (кривая Михайлова) обходит последовательно в положительном направлении 4 (степень характеристического полинома) квадранта. При остальных K система не устойчива.
|
|
6. Найдите максимальный коэффициент усиления разомкнутой системы. Объясните этот результат.(13) |
|
|
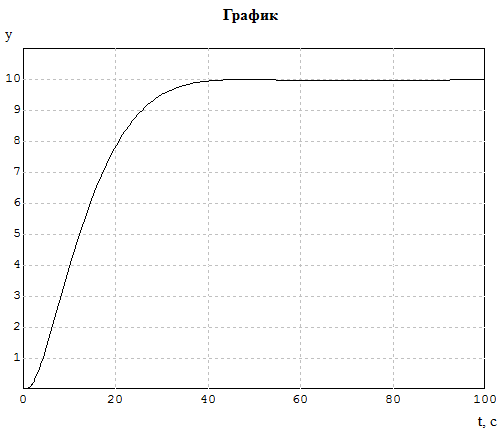
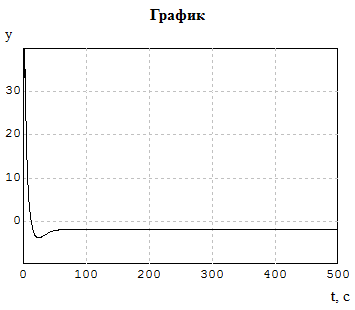
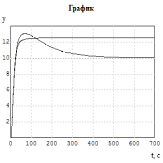
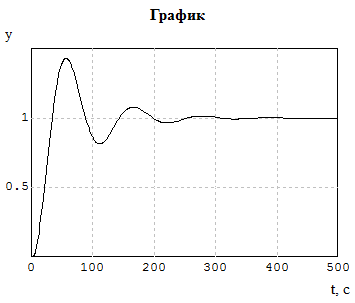
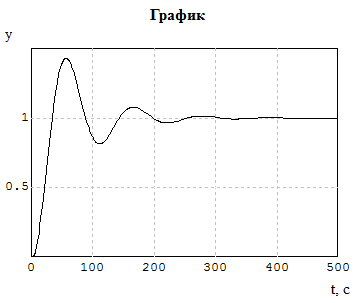
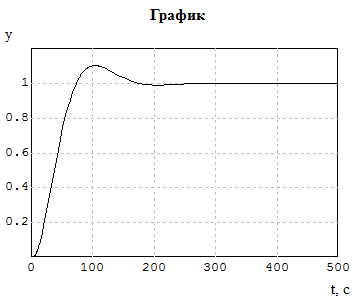
7. Переходную характеристика (замкнутой системы, время интегрирования 500). Сравнение с полученной на этапе 2. Анализ переходной характеристики, полученной на этапе 2, определение времени переходного процесса, и перерегулирование в процентах. (14) |
Этап 7 Этап 2
Время переходного процесса: 420 с. Перерегулирование: 14%.
|
|
8. Исследование системы с пропорциональным (П-) регулятором.
Коэффициента
усиления
|
Время переходного процесса: 255 с. (время переходного процесса изменилось в 1.7 раза)
Запас по фазе: 800 Запас по амплитуде: 25 дБ. Коэффициент усиления: ≈1 дБ
|
|
9. Дополнительный
коэффициент усиления
|
Перерегулирование: 10% Время переходного процесса: 70 с.(в 3.6 раза меньше чем с (П-) регулятором.)
Запас по фазе: 1000 Запас по амплитуде: 25 дБ. Коэффициент усиления: ≈1 дБ
|
|
10. Дополнительный
коэффициент усиления
|
Перерегулирование: 0% Время переходного процесса: 40 с
|
|
11. Коэффициент усиления системы в установившемся режиме. (19) |
Коэффициент усиления системы равен 1. При постоянном сигнале установившаяся ошибка отсутствует, так как ПД-регулятор содержит интегратор. При линейно возрастающем сигнале установившаяся ошибка линейно возрастает, так как при любом конечном коэффициенте ошибка в системе - конечна.
|
|
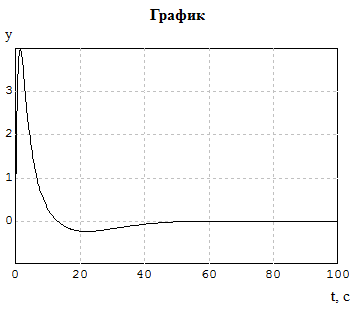
12. Постройте изменение сигнала управления при единичном ступенчатом входном сигнале и скопируйте график в отчет (время интегрирования ≈100). Объясните, почему сигнал управления стремится к нулю.(20) |
Сигнал управления стремится к нулю, так как передаточная функция замкнутой системы имеет нуль в точке s=0. |
|
13. Модель (21) |
|
|
14. Исследование поворота на 10 градусов. (22) |
|
|
15. Исследование реакции системы на постоянный сигнал, приложенный непосредственно к входу объекта. (23) |
|
|
16. Проверка, вышло ли судно на заданный курс 10 градусов. (24) |
Судно не вышло на заданный курс. Отклонение составляет 2.4 градуса. Коэффициент усиления в установившемся режиме равен ≈ 0.9 |
|
17. Чтобы регулятор Компенсация постоянной составляющей возмущения. (25) |
Запас по фазе: 900 Запас по амплитуде: 30 дБ. Запасы устойчивости системы являются достаточными.
|
|
18. Постройте передаточную функцию по возмущению замкнутой системы с ПИД-регулятором. С ее помощью объясните результат, полученный на предыдущем шаге. Для этой передаточной функции вычислите коэффициент усиления в установившемся режиме. (26) |
|



 .
.





 ,
при котором перерегулирование примерно
равно 10%.(15)
,
при котором перерегулирование примерно
равно 10%.(15)
 :
:
 ,
при котором перерегулирование примерно
равно 10%. Сравнение пропорционального
и ПД-регулятора. (17)
,
при котором перерегулирование примерно
равно 10%. Сравнение пропорционального
и ПД-регулятора. (17)

 ,
при котором время переходного процесса
минимально(18)
,
при котором время переходного процесса
минимально(18)