

Архангелский ПСпице и Десигн Центер Ч1 1996
.pdf2.3. Описание элементов схемы |
41 |
<имя> <узел+> <узел-> [[DC]<значение>] [AC<амплитуда> + [<фаза>]] [<модель переходного процесса>]
За положительное на-правление напряжения источ-ника принимается
разность |
потенциалов |
между |
|
узлами <узел+> и <узел->, за |
|||
положи-тельное |
направление |
||
тока - ток, текущий через |
|||
источник |
от <узла+> к |
<узлу-> |
|
(рис. 2.5). |
|
|
Рис. 2.5. Источники напряжения и тока |
Значение по постоянному току (по умолчанию - 0) используется
в режиме DC, а также при линеаризации схемы в режиме AC и при расчете переходного процесса, если в операторе не задана <модель переходного процесса>. Для частотного анализа задается амплитуда (относительная условная величина, так как в линеризованной схеме абсолютная величина амплитуды значения не имеет) и может задаваться фаза в градусах (по умолчанию 0). Например, операторы
V1 |
1 0 AC 0.5 |
V2 |
2 0 AC 0.5 180 |
описывают парафазные сигналы в узлах 1 и 2 с результирующей единичной амплитудой напряжения между этими узлами. Впрочем, аналогичный результат можно получить не используя сдвиги фаз на 180 градусов, а изменив последовательность перечисления узлов в источнике V2:
V1 |
1 0 AC 0.5 |
V2 |
0 2 AC 0.5. |
Указываемая в операторе <модель переходного процесса> имеет одну из
следующих форм: |
|
|
|
|
|
EXP(<параметры>) |
- прямоугольный |
импульс |
с экспоненциаль- |
||
|
|
ными фронтами; |
|
|
|
PULSE(<параметры>) |
- трапецеидальный |
импульс |
(одиночный |
или |
|
|
|
периодически повторяющийся); |
|
||
PWL(<параметры>) |
- |
кусочно-линейный сигнал; |
|
|
|
SFFM(<параметры>) |
- |
частотно-модулированный |
синусоидальный |
||
|
|
сигнал; |
|
|
|
SIN(<параметры>) |
- синусоидальный |
сигнал с |
постоянной |
или |
|
|
|
затухающей амплитудой. |
|
|
|
42 2. Описание схемы на входном языке программы PSpice
Описание моделей и их параметров см. в работе [3]. Способы получения более сложных сигналов см. п. 4.6.
Если в описании источника не указано ни одно значение, например V1 10 5, то выходная величина источника равна нулю.Такие источники напряжения иногда включают последовательно с какими-либо элементами в качестве токосъемных. Дело в том, что в различных выражениях (см. п. 2.3.8) можно использовать токи только независимых источников напряжения. Значит, при включении источника нулевого напряжения в какую-либо ветвь схемы можно использовать в выражениях его ток как ток данной ветви.
2.3.6. ЗАВИСИМЫЕ ИСТОЧНИКИ НАПРЯЖЕНИЯ И ТОКА (ПРОСТЫЕ ФОРМЫ ОПИСАНИЯ)
При описании схемы могут использоваться зависимые линейные и нелинейные источники тока и напряжения: I(U) - G, U(U) - E, I(I) - F, U(I) -H. Для описания идеального зависимого источника с постоянным коэффициентом передачи используется оператор вида:
<имя> <узел+> <узел-> <управление> <величина>.
Порядок перечисления узлов такой же, как в независимых источниках V и
I.
Указываемая в операторе <величина> - коэффициент передачи. Вид <управления> зависит от того, напряжением или током управляется источник. При управлении напряжением <управление> - два узла, разность напряжений между которыми и является управляющей величиной.
Например, операторы
EAMP 3 0 1 2 4
GAMP 0 3 1 2 4m
описывают зависимые источники (идеальные усилители напряжения с выходом по напряжению и по току), управляемые разностью потенциалов узлов 1 и 2. В первом из них коэффициент передачи напряжения равен 4, во втором крутизна равна 4мА/В.
Если управление осуществляется током, то <управление> - имя независимого источника напряжения, ток через который и является управляющей величиной. Например, операторы
HAMP 3 0 V1 5

2.3. Описание элементов схемы |
43 |
FAMP 0 3 V1 5К
описывают зависимые источники (идеальные усилители тока, с выходом по напряжению и току), управляемые током источника V1. Если нужно осуществить управление током элемента другого типа (не V), то последовательно с ним надо включить элемент V с нулевым напряжением и его имя использовать в соответствующем операторе H или F.
Линейные зависимые источники, управляемые несколькими входными величинами, а также нелинейные источники с полиномиальной характеристикой описываются операторами вида
<имя> <узел+> <узел-> POLY(<n>) <управления> + <коэффициенты>,
где <n> - число управляющих величин; <управления> - список управляющих величин, записанных по указанным выше правилам (для большей наглядности их можно разделять скобками); <коэффициенты> - коэффициенты Pi полинома. Выходная величина определяется через управляющие величины Xi (напряжения или токи) выражением
P0 + P1 X1 + ... + Pn Xn + Pn+1 X1 X1 + Pn+2 X1 X2 + ... + P2n X1 Xn +
+P2n+1 X2 X2 + P2n+2 X2 X3 +... + P bn! g+2n+1 X1 X12 +
2 n−2 !
+ P bn! g+2n+2 X1 X22 +...
2 n−2 !
Коэффициенты в операторе описания источника перечисляются по порядку начиная с P0 и кончая последним коэффициентом, отличным от нуля. Приведем примеры. Операторы
ESUM 4 0 POLY(3) 1 0 2 0 3 0 0 1 1 2
ESUM 4 0 POLY(3) (1,0) (2,0) (3,0) 0 1 1 2
тождественны друг другу и описывают источник напряжения, суммирующий потенциалы узлов 1, 2, 3, причем потенциал узла 3 суммируется с весовым коэффициентом 2.
Оператор
EMULT 4 0 POLY(2) (1,0) (2,0) 0 0 0 0 1
описывает источник, перемножающий потенциалы узлов 1 и 2.
44 2. Описание схемы на входном языке программы PSpice
Оператор
G 1 2 POLY(1) (1 2) 0 0 1
описывает нелинейный двухполюсник (источник тока, управляемый напряжением на своих выводах), имеющий квадратичную зависимость тока от напряжения. Имеются еще 4 формы записи операторов зависимых источников E и G, которые будут описаны в п. 2.3.9.
2.3.7.ГЛОБАЛЬНЫЕ ПАРАМЕТРЫ
Вбольшинстве операторов входного языка вместо численных значений можно использовать глобальные параметры. Например, можно записать
R1 1 2 {RNOM}
R2 3 4 {RNOM}
и в дальнейшем при изменении параметра RNOM одновременно будут изменяться номиналы резисторов R1 и R2. Имена и значения глобальных параметров задаются оператором .PARAM следующего вида:
.PARAM <имя> = <величина> ...
Имя параметра может быть произвольным, кроме следующих зарезервированных идентификаторов: TIME, TEMP, VT, GMIN.
Значение параметра <величина> может задаваться константой или математическим выражением (см. п. 2.3.8), заключенным в фигурные скобки и содержащим только константы. Например:
.PARAM RNOM=5K, PI2={2*3.14159}, OMEGA={2*3.14159*100kHz}.
Изменять значение параметра в процессе многовариантного анализа можно оператором .STEP (см. п. 3.7 и пособие [3]).
Параметры можно использовать вместо численных значений:
♦для параметров моделей;
♦для параметров элементов (номиналов резисторов, конденсаторов, индуктивностей, относительной площади полупроводниковых приборов и т.п.);
♦для параметров источников V, I, E, G, F, H;
♦для начальных значений напряжений конденсаторов и токов индуктивностей, задаваемых элементами описаний IC;

2.3. Описание элементов схемы |
45 |
♦для значений, задаваемых операторами .IC и .NODESET. Запрещено использование параметров:
♦вместо имен узлов;
♦вместо значений в операторах, задающих вид анализа (.AC, .TRAN и
др.);
♦вместо параметров модели PWL для V и I;
♦вместо полиномиальных коэфффициентов для E,G,F,H;
♦вместо параметров NL и F в описании линии задержки T;
♦вместо температурных коэффициентов, указываемых в операторе R (см. работу [3]); однако параметры можно использовать для температурных коэффициентов в модели резистора.
Использование параметров в подсхемах - отдельный вопрос, рассмотренный ниже в п. 2.3.10.
2.3.8.МАТЕМАТИЧЕСКИЕ ВЫРАЖЕНИЯ
Вописаниях элементов, моделей и во многих других операторах входного языка можно вместо конкретных значений записывать математические выражения, содержащие константы, глобальные параметры (см. п. 2.3.7), арифметические операции "+", "-", "*", "/", скобки и следующие функции:
ABS(X) |
|X| |
SQRT(X) |
X |
EXP(X) |
eX |
LOG(X) |
ln(X), натуральный логарифм |
LOG(X) |
log(X), десятичный логарифм |
PWR(X,Y) |
|X|Y |
SIN(X) |
sin(X), X в радианах |
COS(X) |
COS(X) |
TAN(X) |
tg(X) X в радианах |
ATAN(X) |
arctg(X) результат в радианах |
Начиная с PSpice 5 добавлены еще две функции:
TABLE(X,...) табличная функция
LIMIT(X,...) функция ограничения
Табличная кусочно-линейная функция Y(X) задается парами чисел X1, Y(X1), X2, Y(X2), ... Xn, Y(Xn) - координатами точек излома. При значениях
46 2. Описание схемы на входном языке программы PSpice
X<X1 функция постоянна и равна Y(X1). Аналогично при X>Xn функция равна Y(Xn). Внутри заданного диапазона изменения аргумента проводится линейная интерполяция таблицы.
Функция ограничения LIMIT задается минимальным и максимальным значениями аргумента Xмин и Xмакс. Значения функции определяются соотношением
R| Xмин при X ≤ Xмин,
Y = S| X при Xмин < X < Xмакс,
TXмакспри X ≥ Xмакс.
Фактически, функция LIMIT является частным случаем табличной функции. При записи математическое выражение заключается в фигурные скобки и
должно размещаться в одну строку, т.е. без переносов. Примеры: R1 1 2 {RNOM}
R2 3 4 {RNOM/2}
C1 1 2 {TAU/RNOM}
В этих примерах при любых значениях глобальных параметров RNOM и TAU номинал резистора R2 будет в 2 раза меньше номинала R1, а постоянная времени R1 C1 равна TAU.
Область применения математических выражений та же, что и область применения глобальных параметров (см. п. 2.3.7).
Если для сложных выражений возникают трудности при их записи в одну строку, то возможны два выхода. Наиболее простой - увеличить допустимую длину строки оператором
.WIDTH IN=132.
Более универсальный путь - оформить отдельные члены выражения как функции и ввести их операторами .FUNC (см. работу [3]). Например:
.FUNC MIN(A,B) 0.5*(A+B-ABS(A-B))
.FUNC MAX(A,B) 0.5*(A+B+ABS(A-B)) C1 1 2 {MAX(T1,T2)/MIN(RN1,RN2)}
Операторы .FUNC должны размещаться во входном файле до первой ссылки в выражении на соответствующую функцию. Подробнее о функциях см. в пособии [3].
2.3. Описание элементов схемы |
47 |
2.3.9. ЗАВИСИМЫЕ ИСТОЧНИКИ НАПРЯЖЕНИЯ И ТОКА (ДОПОЛНИТЕЛЬНЫЕ ФОРМЫ ОПИСАНИЯ)
Если версия PSpice содержит опцию поведенческого моделирования Analog Behavioral Modeling, то для зависимых источников E и G допускается ряд дополнительных форм описания. Первые две из них расширяют возможности построения моделей нелинейных элементов. Они имеют следующий синтаксис:
<имя> <узел+> <узел-> VALUE = {<выражение>} <имя> <узел+> <узел-> TABLE = {<выражение>}
+<аргумент> <функция>...
Вэтих операторах <выражение> - управляющая величина, записанная в виде математического выражения. Оно может содержать константы, глобальные параметры, потенциалы узлов (например, V(3)), разности потенциалов (например, V(4,5)), токи V элементов (например, I(V1)), время (TIME). Поскольку управляющими величинами могут быть как токи, так и напряжения, отпадает необходимость в специальных источниках, управляемых током (элементах H и F).
Первая из приведенных форм оператора описывает зависимость выходной величины в аналитическом виде, а вторая - в табличном. При табличном описании перечисляются пары чисел - значение аргумента, которым является заданное выражение, и значение функции (т.е. выходной величины источника), соответствующее этому значению аргумента. Значения аргумента в таблице должны монотонно возрастать. Между заданными в таблице точками программа осуществляет линейную интерполяцию. При значениях аргумента, меньших первого заданного в таблице значения и больших последнего заданного, выходная величина источника считается постоянной и равной соответственно первому или последнему значению в таблице.
Примеры описания:
ELOG 2 0 VALUE = {100*LOG(V(1)+1mV)}
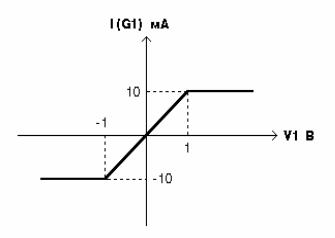
G1 0 1 TABLE = {V1} -1m -10m 1m 10m
48 2. Описание схемы на входном языке программы PSpice
Рис. 2.6. Источник тока с табличной передаточной функцией
приведены ниже в п. 5.2.
Первый пример описывает источник напряжения, управляемый потенциалом узла 1 по логарифмическому закону. Второй пример описывает источник тока, управляемый током элемента V1 по закону, представленному на рис. 2.6. Другие примеры, иллюстрирующие богатые возможности описания нелинейных элементов зависимыми источниками,
Для моделирования частотных характеристик коэффициентов передачи зависимых источников E и G предусмотрены операторы вида:
<имя> <узел+> <узел-> LAPLACE {<выражение>} = + <изображение>
<имя> <узел+> <узел-> FREQ {<выражение>} = <частота>
+ <модуль> <фаза> ...
Управляющая величина задается как <выражение> по описанным выше правилам.
В первой из двух приведенных форм операторов <изображение> - операторное изображение по Лапласу-Карсону. При этом оператор Лапласа обозначается символом "s". Например,
E1 2 0 LAPLACE {V(1)} = { 10/(1+1u*s)}
описывает зависимый источник напряжения, управляемый потенциалом узла 1, с коэффициентом передачи по постоянному току (т.е. при s=0) равным 10 и со спадом в области высоких частот, соответствующим постоянной времени 1 мкс.
Во второй из приведенных форм операторов частотная характеристика коэффициента передачи задается таблицей, каждая сторока которой содержит частоту, модуль коэффициента передачи в децибеллах и фазу в градусах. При

2.3. Описание элементов схемы |
49 |
интерполяции таблицы модуль коэффициента передачи считается линейно зависимым от логарифма частоты, а фаза - линейно зависимой от частоты. Вне диапазона частот, указанного в таблице, модуль и фаза считаются постоянными и равными соответствующим крайним табличным значениям. Например,
Е1 2 0 FREQ {V(1)} = (0,0,0) (5kHz,0,-5760) (6kHz,-60,-6912)
описывает фильтр нижних частот с коэффициентом передачи, равным 1 (0 дб) при частотах ниже 5 кГц и равным 0.001 (-60 дб) при частотах выше 6 кГц. Фаза линейно зависит от частоты.
При частотном анализе программа моделирования определяет для требуемой частоты f коэффициент передачи непосредственно по заданному операторному изображению, заменяя s на j 2πf, или путем интерполяции таблицы. При анализе по постоянному току коэффициент передачи определяется так же, но для f=0. При расчетах переходных процессов используется преобразование Фурье. На каждом временном шаге выходной сигнал определяется как свертка последнего значения управляющего сигнала и импульсной характеристики коэффициента передачи. Поэтому при интерпретации результатов расчета переходных процессов с моделями зависимых источников, описываемых преобразованием Лапласа или частотными характеристиками, надо быть очень осторожным и учитывать следующие соображения.
Разрешение по времени Тр (т.е. минимальный временной интервал, на котором программа может различить изменения управляющего сигнала зависимого источника) обратно пропорционально максимальной частоте Fмакс.
Величина Fмакс определяется заданными частотными характеристиками зависимого источника, а также значениями относительной погрешности расчета RELTOL (см. п. 3.4) и заданной в операторе .TRAN (см. п. 3.4 и работу [3]) длительностью расчета переходного процесса TSTOP. При табличном задании частотных характеристик Fмакс не превышает  RELTOL Fтмакс, где Fтмакс - максимальная частота в таблице. При задании преобразования Лапласа Fмакс не превышает верхней частоты, на которой модуль коэффициента передачи падает в RELTOL раз по сравнению со своим максимумом (если такая частота есть). И для сокращения затрат времени и памяти на расчет всегда устанавливается ограничение:
RELTOL Fтмакс, где Fтмакс - максимальная частота в таблице. При задании преобразования Лапласа Fмакс не превышает верхней частоты, на которой модуль коэффициента передачи падает в RELTOL раз по сравнению со своим максимумом (если такая частота есть). И для сокращения затрат времени и памяти на расчет всегда устанавливается ограничение:
Fмакс < 10/(RELTOL TSTOP).
В итоге величина Fмакс выбирается минимальной из перечисленных значений. Следовательно Тр определяется максимальной из величин  RELTOL TSTOP/10 и 1/(RELTOL Fтмакс) при табличном задании или 1/Fмакс при преобразовании Лапласа. А желательная величина Tр
RELTOL TSTOP/10 и 1/(RELTOL Fтмакс) при табличном задании или 1/Fмакс при преобразовании Лапласа. А желательная величина Tр
50 2. Описание схемы на входном языке программы PSpice
определяется скоростью изменения управляющих переменных во времени. Условно можно считать, что для приемлемой точности величина Tр должна быть в 10 раз меньше длительности фронта управляющей переменной. Отсюда и вытекает основное ограничение на применение рассматриваемых вариантов зависимых источников при расчетах переходных процессов.
При использовании операторных изображений надо кроме того учитывать, что если изображение имеет полюса в левой полуплоскости, то цепь становится неустойчивой и это может вызвать проблемы со сходимостью как при расчете переходных процессов, так и при расчете по постоянному току.
При табличном описании частотных характеристик дополнительная опасность заключается в том, что легко можно задать физически нереализуемые характеристики. В частности, задав недостаточно сильное нарастание фазы с ростом частоты можно получить импульсную характеристику, имеющую заметную величину в области отрицательных времен. Это получится, например, если в приведенном выше описании фильтра нижних частот задать при любой частоте нулевой фазовый сдвиг или даже не нулевой, но недостаточно быстро нарастающий с ростом частоты. Подобные системы не могут быть реализованы физически и, соответственно, PSpice при расчете переходных процессов может дать для них странные и необъяснимые с физической точки зрения результаты.
Сказанное выше показывает, что надо с большой осторожностью использовать зависимые источники с операторным или табличным описанием частотных характеристик. Однако при грамотном их применении можно получить очень полезные результаты.
Помимо описанных форм операторов зависимых источников, в DesignCenter 6 введен оператор описания характеристик фильтров по Чебышеву для элемента E. Подробнее см. в работе [3].
2.4. ПОДСХЕМЫ
Описание модели подсхемы начинается оператором
.SUBCKT <имя модели подсхемы> <список внешних узлов>
+[ PARAMS: <имя> = <значение>...]
изаканчивается оператором
.ENDS.
Между этими операторами размещаются операторы, описывающие элементы подсхемы и их модели. Запрещено только внутри модели подсхемы описывать модели других подсхем, т.е. использовать операторы .SUBCKT. В п. 2.2.5 уже указывалось, что имена всех элементов и моделей, включенных