

Мирошин Интегралные и дифференциалные операторы 2010
.pdfДоказательство. Дифференцируя X (t ) , имеем: dtd X (t ) = AetAX0 = AX (t ) , X (0)= X0 .
4.3. Фазовое пространство, фазовый поток, фазовые кривые
Определение 4.6. Рассмотрим систему
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
X = AX, X =(x ,..., x )T . |
|
(4.2) |
|||||||||
|
|
|
|
|
|
|
|
1 |
n |
|
|
|
Тогда пространство En |
называется фазовым пространством |
|||||||||||
этой системы, точки En – фазовые. |
|
|
|
|
|
|||||||
Определение 4.7. Пара |
(En, {etA}t R ) |
называется фазовым по- |
||||||||||
током. |
|
|
|
|
|
|
|
|
|
|
|
|
Определение 4.8. Кривая в |
|
|
En X (t )=etAX |
0 |
называется фазо- |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
вой, проходящей через точку |
X0 En. Фазовая кривая – это фазо- |
|||||||||||
вая траектория точки X0 под действием группы {etA}. |
|
|||||||||||
Определение 4.9. Точка |
X |
0 |
En |
называется положением рав- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
новесия системы X = AX |
(неподвижной точкой фазового потока), |
|||||||||||
|
i |
|
|
|
|
|
|
|
|
|
|
|
если t R |
X (t)= etAX |
0 |
≡ X |
0 |
. |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
Замечание. |
Для рассматриваемого случая X0 = 0 – неподвиж- |
|||||||||||
ная точка. |
|
|
|
|
|
|
|
En+1 = E1 ×En ={(t, X )}, |
|
|||
Определение 4.10. Пространство |
где |
|||||||||||
En – фазовое пространство системы (4,2), называется расширен-
ным фазовым пространством системы (4.2).
График X (t )=etAX0 в расширенном фазовом пространстве на-
зывается интегральной кривой потока (En,{etA}) (системы 4.2).
31
4.4. Фазовые траектории на плоскости
Рассмотрим систему двух линейных уравнений с постоянными коэффициентами с двумя искомыми функциями:
i |
a b |
|
x |
|
|
x = ax +by |
, |
(4.3) |
|||
|
A = |
|
X = . |
||
i |
c |
d |
|
y |
|
y = cx +dy, |
|
|
|
|
|
Фазовое пространство в этом случае двумерно – фазовая плоскость, соответствующая группа фазового потока {etA}, где
a |
b |
Исследуем в этом случае все фазовые траектории. |
|||||
A = |
. |
||||||
c |
d |
|
|
|
|
|
|
Сразу отметим, что при любой матрице A точка |
X0 |
|
0 |
|
является |
||
= |
0 |
|
|||||
|
|
|
|
|
|
|
|
положением равновесия системы. Поведение кривых будет определяться корнями характеристического уравнения:
det (A −λE) ≡ |
|
a −λ |
b |
|
= 0 . |
|
|
||||
|
|
c |
d −λ |
|
|
Пусть λ1 и λ2 – корни этого уравнения. Возможны следующие случаи.
I.= det A ≠ 0 λ1 ≠ 0 , λ2 ≠ 0 .
а) λ1 ≠ λ2 |
– вещественные. Общее решение |
|
||||||||||||||||
|
|
|
|
|
|
|
x |
|
|
|
α1 |
λ t |
α2 |
|
λ t |
, |
||
|
|
|
|
|
|
|
= C1 |
e 1 |
+C2 |
e |
2 |
|||||||
|
|
|
|
|
|
|
y |
|
|
|
β1 |
|
β2 |
|
|
|
||
где |
h = |
|
α |
|
, |
h |
= |
|
α |
2 |
|
– два линейно независимых собственных |
||||||
|
1 |
|
|
β |
|
|||||||||||||
|
1 |
β |
|
2 |
|
2 |
|
|
|
|
|
|
|
|||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вектора матрицы A (рис. 4.1).
1. λ1 < λ2 < 0 . Рассмотрим на фазовой плоскости 0xy прямые, проходящие через начало координат в направлении собственных
векторов h1 = (α1, β1 ) и h2 = (α2, β2 ) матрицы A. Эти прямые сами являются фазовыми траекториями:
32

C ≠ 0, C |
2 |
= 0 |
y |
= |
β1 |
, |
C = 0, C |
2 |
≠ 0 |
y |
= |
β1 |
. |
||||
|
|
|
|
||||||||||||||
1 |
|
|
|
x |
|
α1 |
1 |
|
|
|
x |
|
α1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Строим эти траектории. Далее, если t → +∞ , то: |
|
|
|
|
|
||||||||||||
x (t) = C α eλ1t +C |
α eλ2t →0 , |
y (t) =C β eλ1t |
+C β eλ2t →0 , |
||||||||||||||
1 |
1 |
|
2 |
2 |
|
|
|
|
1 |
1 |
|
2 |
2 |
|
|
|
|
т.е. при t → +∞ по любой траектории точка движется в начало координат. Считаем производную y′x :
y′x = |
y′t |
|
C1β1λ1eλ1t |
+C2β2λ2eλ2t |
C1β1λ1e(λ1−λ2)t |
+C2β2λ2 |
|
|||||
|
= |
|
|
|
|
= |
|
|
|
|
. |
|
′ |
C1α1λ1e |
λ1t |
+C2α2λ2e |
λ2t |
C1α1λ1e |
(λ1−λ2)t |
+C2α2λ |
2 |
||||
|
xt |
|
|
|
|
|
|
|||||
При t → +∞ y′x →β2 / α2 , это означает, что при t → +∞ все траектории входят в начало координат, касаясь прямой с направляющим вектором h2 (отвечающим меньшему по модулю собственному значению матрицы A). Если же t → −∞ , то y′x →β1 / α1 . Это означает, что на « −∞» фазовые траектории имеют асимптоты, параллельные прямой с направляющим вектором h1 ={α1, β1} (отве-
чающим большему по абсолютной величине собственному значению A). Кроме того, точка O (0, 0) – сама является фазовой тра-
екторией. Это положение равновесия, которое называется устойчивым узлом (см. рис 4.1, а).
2. 0 <λ2 <λ1 . В этом случае замена t → −t сводит рассматри-
ваемые траектории к траекториям пункта 1. Начертание фазовых траекторий не изменится (см. рис 4.1, б), но направление движения точки по траектории с возрастанием t сменится на противоположное. O (0, 0) – точка покоя, в этом случае положение равновесия −
неустойчивый узел.
3. λ1 <0 <λ2 . В этом случае: y′x →β2 / α2 при
y′x →β1 / α1 при t → −∞ . O (0, 0) – точки покоя. Она называется
седлом (см. рис 4.1, в).
б) λ1 ≠ λ2 – комплексные. Тогда λ2 =λ1 = α+iβ.
Общее решение имеет вид:
x(t )=(C1 cosβt +C2 sin βt)eαt;y (t)=(C1 cosβt +C2 sin βt )eαt,
33

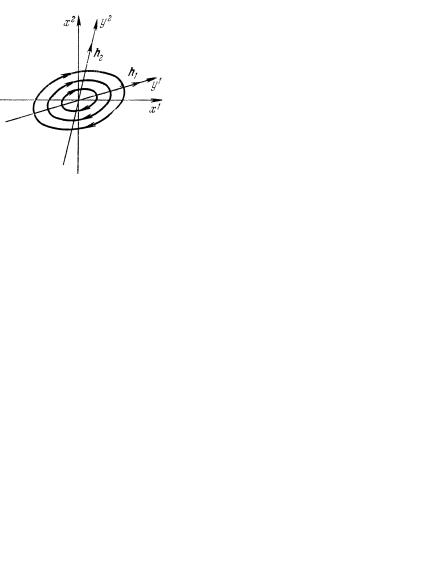
где C1 и C2 – произвольные постоянные, а C1 и C2 – их линейные комбинации. Возможны следующие случаи (рис. 4.2).
а |
б |
в
Рис. 4.1. Фазовые траектории вблизи точки равновесия в случае действительных, отличных от нуля собственных значений λ1 ≠ λ2 :
а – устойчивый узел; б – неустойчивый узел; в – «седло»
34
1. α =0 . Тогда |
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
C x −C y = |
C C |
2 |
−C C |
|
|
sin βt; |
|||||||||
|
|
1 |
1 |
|
|
|
1 |
|
|
2 1) |
|
|
||||
|
|
|
x −C |
y =(C C |
|
−C C |
|
)cosβt, |
||||||||
|
C |
|
2 |
|||||||||||||
|
|
2 |
2 |
|
|
|
|
2 |
1 |
1 |
|
|
|
|||
т.е. получаем семейство кривых |
|
|
|
|
|
|
|
|||||||||
|
(C1x −C1y)2 |
|
|
|
|
|
(C2x −C2 y)2 |
|||||||||
|
|
+ |
|
=1. |
||||||||||||
|
(C1C2 −C2C1)2 |
(C1C2 −C2C1)2 |
||||||||||||||
В этом случае точка покоя |
O (0, 0) |
называется центром (см. |
||||||||||||||
рис. 4.2, а). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Центр – траектория, устойчивая по Ляпунову, но не асимпто-
тически устойчивая. Все траектории центра замкнутые. Для того чтобы найти направления движения по этим траекториям, нужно
взять точку M0 (x0, |
y0 ), |
подсчитать вектор скорости V (x, y) в |
|||
этой точке M0 (x0, y0 ) из системы (4.3). |
|||||
i |
i |
|
|
|
|
Имеем: V = x (t) |
, y (t) |
={ax +by, cx +dy} |
. |
||
|
|
M0 |
|
M0 |
|
|
|
|
|
|
|
Замечательное свойство поля скоростей V (t ): так как точка покоя только одна (точка O (0, 0)) и V (t ) непрерывно зависит от
M (x, y), то вдоль любой траектории направление движения не меняется, на всех траекториях направление движения одинаково!
2. α ≠ 0 . Аналогичные выкладки дают: |
|
|
|
|
|||
|
(C1x −C1y)2 |
+ |
(C2x −C2 y)2 |
|
= e |
2αt |
. |
|
(C1C2 −C2C1)2 |
(C1C2 −C2C1) |
2 |
|
|||
|
|
|
|
|
|||
В этом случае точка покоя |
O (0, 0) называется фокусом. Если |
||||||
α <0 , то при t → +∞ точка по любой траектории неограниченно приближается к точке O (0, 0), т.е. при α <0 фокус асимптотически устойчив (см. рис. 4.2, б). Если же α > 0 , то при t → +∞ точка по любой траектории уходит на бесконечность, т.е. при α > 0 точка O (0, 0) неустойчива – неустойчивый фокус (см. рис. 4.2, б).
в) λ1 = λ2 ≠ 0 (так как ≠0) . В этом случае λ1 и λ2 – обязательно вещественные числа. Возможны следующие случаи.
35
а
б
в
Рис. 4.2. Фазовые траектории вблизи точки равновесия в случае комплексных собственных значений λ1 ≠ λ2 :
а – центр; б – устойчивый фокус; в – неустойчивый фокус
36
1. λ1 = λ2 = λ ≠ 0 , |
Rang (A−λE) = 0 , т.е. |
A −λE = O – нулевая |
|||||
матрица. Но тогда исходная система (4.3) имеет вид: |
|
|
|||||
x = λx; |
|
x (t ) =C eλt, |
y (t ) =C eλt, |
C , C |
|
R . |
|
|
2 |
||||||
y = λy, |
|
1 |
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
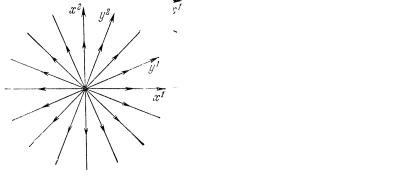
Фазовые траектории – всевозможные полупрямые, исходящие из начала координат. Точка покоя O (0, 0) в этом случае называется
дикритическим узлом (рис. 4.3).
а |
б |
Рис. 4.3. Фазовые траектории вблизи точки равновесия в случае действительных собственных значений λ1 = λ2 (дикритический узел):
а – устойчивый; б – неустойчивый
Если λ < 0 , то дикритический узел асимптотически устойчив
(см. рис.4.3, а), если λ > 0 – то неустойчив (см. рис.4.3, б).
2. λ1 = λ2 = λ ≠ 0 , Rang (A −λE) =1. Общее решение имеет вид
x(t) |
|
|
α |
|
+C2 |
|
α |
|
+α t |
|
|
|
= C1 |
1 |
|
|
|
2 |
3 eλt, |
||
y (t) |
|
|
β1 |
|
|
β2 +β3t |
||||
где h1 ={α1, β1} – |
|
собственный |
|
вектор, а h2 ={α2, β2}, |
||||||
h3 ={α3, β3} – некоторые векторы. Уточним структуру решения, имеем:
37

|
|
|
|
′ |
|
|
|
|
C1 h1+C2 |
h2 +h3 t eλt = A C1 h1 +C2 |
h2 +h3 t |
||||||
|
↓ |
↓ |
↓ |
|
|
↓ |
↓ |
↓ |
приравнивая коэффициенты при |
t eλt, |
получаем: λh = |
||||||
|
|
|
|
|
|
|
|
3 |
↓
eλt,
Ah3 , т.е.
↓
h3 – собственный вектор A. Тогда h3 |
h1 . Следовательно, меняя |
||||||||
↓ |
|
|
|
|
↓ |
↓ |
|
|
|
константы, можно считать, что h3 |
= h1 (!). |
|
|
|
|||||
Получили общее решение |
↓ |
|
↓ |
|
|
|
|
||
|
|
|
|
|
|
|
|||
x (t) |
|
|
|
|
|
|
λt |
. |
|
|
|
= C1 h1+C2 |
h2 |
+h1 t e |
|
||||
y (t) |
|
↓ |
|
↓ ↓ |
|
|
|
||
Точка покоя O (0, 0) в этом случае называется вырожденным узлом (рис. 4.4). Если λ < 0 , то вырожденный узел асимптотически ус-
тойчив (см. рис. 4.4, а), а если λ > 0 – то неустойчив (см.
рис. 4.4, б). Среди фазовых траекторий имеется одна прямолинейная
–y = β1 , т.е. траектория в направлении собственного вектора h1 . x α1
Далее имеем: |
|
|
|
|
|
|
y′x = |
C2β1 +λ(C1β1 +C2 |
(β2 +β1t )) |
→ |
|
β1 |
при t →∞. |
C2α1 +λ(C1α1 +C2 |
|
|
||||
|
(ε2 +α1t )) |
|
α1 |
|||
Следовательно, при λ<0 все траектории входят в точку O (0, 0), |
||||||
при t → +∞ касаясь прямой y = (β1 / α1)x , |
и уходят из "−∞" под |
|||||
этим же углом (аналогично при λ>0) . Для уточнения хода траекторий строятся несколько векторов поля скоростей.
II. Рассмотрим случай |
= |
|
a |
b |
|
= 0 . В этом случае хотя бы |
|
|
|||||
|
|
|
c |
d |
|
|
один из корней характеристического уравнения равен нулю (а следовательно, оба корня действительны).
а) λ1 = 0, λ2 ≠ 0. Общее решение: |
|
|
|
|
|
|
|
|
||||||
x |
= C |
|
α |
|
+C |
|
|
α |
2 |
|
et |
λ |
2 |
, |
|
|
1 |
|
2 |
|
|
|
|
||||||
1 |
β1 |
|
β2 |
|
|
|
|
|||||||
y |
|
|
|
|
|
|
|
|
|
|
|
|||
38

где h1 ={α1, β2} |
и h2 ={α2, β2} |
– собственные векторы матрицы A. |
Если C2 = 0 , |
C1 ≠ 0 , то |
получаем фазовую траекторию |
y = (β1 / α1)x . На этой траектории каждая точка – точка покоя! |
|||||||
Все остальные траектории (C2 ≠ 0) – также прямолинейные |
|||||||
|
y −C1β1 |
= |
β2 |
. |
|||
|
x −C α |
|
α |
2 |
|||
1 |
1 |
|
|
|
|
||
Все они параллельны вектору h2 . |
При λ < 0 точки по этим траек- |
||||||
ториям “движутся” к прямой |
y = (β1 / α1)x . При λ < 0 все точки |
||||||
покоя устойчивы по Ляпунову (но не асимптотически), при λ > 0 –
неустойчивы.
а б
Рис. 4.4. Фазовые траектории вблизи точки равновесия в случае действительных собственных значений λ1 =λ2 =λ ≠ 0
(вырожденный узел): а – устойчивый; б– неустойчивый
б) λ1 = λ2 = 0 . В этом случае возможны следующие ситуации.
1. Rang (A −0E) = 0 . Тогда |
A =O – нулевая матрица. Общее |
решение x (t ) = C1 , y (t) =C2 . |
Каждая точка плоскости – точка |
покоя, устойчивая по Ляпунову, но не асимптотически.
39
2. Rang (A −0E) =1. Общее решение |
|
|
|
|
|||||||
x(t ) |
=C1 |
|
α |
|
+C2 |
|
α |
|
+α t |
, |
|
|
|
|
1 |
|
|
|
2 |
3 |
|||
y (t) |
|
|
β1 |
|
|
β2 +β3t |
|
||||
где h1 ={α1, β2} |
– собственный вектор. Вновь показываем, что |
h3 ={α3, β3} = h1 . |
Среди траекторий имеется (C2 = 0, C1 ≠ 0) |
траектория y = (β1 / α1)x , целиком состоящая из точек покоя. Остальные траектории – прямые, параллельные прямой y = (β1 / α1)x :
|
y −C1β1 −C2β2 |
= |
β1 |
. |
|
||||
|
x −C α −C α |
2 |
|
α |
|
||||
|
1 |
1 |
2 |
|
|
1 |
|
|
|
Поле скоростей V (t) |
i |
|
i |
|
= C h |
меняет направление |
|||
= x |
(t), y (t) |
|
|||||||
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
|
|
|
|||
при изменении знака C2 . Точка O (0,0) и другие положения равно-
весия неустойчивы.
Были рассмотрены всевозможные виды фазовых траекторий в этом простейшем случае.
§ 5. Первые интегралы системы ОДУ
Вновь рассматриваем систему ОДУ |
|
y ' = f (t, y) , |
(5.1) |
где y = (y1,..., yn ), f = ( f1 (t, y),..., fn (t, y)) |
– непрерывно диффе- |
ренцируемая в некоторой области G Etn,y+1 вектор-функция.
Определение 5.1. Функция ψ(t, y), удовлетворяющая в некоторой подобласти G ' ≤ G условиям:
1)ψ(t, y) непрерывно дифференцируема в G ' и не равна в G ' тождественно постоянной;
2)ψ(t, y) ≡ const вдоль любого решения y = y (t) системы (5.1),
проходящего в G ' , называется первым интегралом системы (5.1) в
G ' .
40