Федеральное агентство по образованию
Государственное образовательное учреждение
Высшего профессионального образования
«Сибирский государственный индустриальный университет»
Кафедра автоматизированных систем
Отчет по лабораторным работам
-
№1
Исследование разомкнутой линейной системы
№2
Проектирование регулятора для линейной системы
№3
Моделирование систем управления в пакете Simulink
Выполнил: студент группы ИСМ-09
Шушунова Л.С.
Проверил:
Грачев Виталий Викторович
Вариант 11
Дата_______________________
Оценка_____________________
Подпись____________________
Новокузнецк, 2011г Лабораторная работа №1 Тема: Исследование разомкнутой линейной системы
Вариант11

1.Описание системы
Исследуется система, описываемая математической моделью в виде передаточной функции
F(s)= 2 s^2 + 0.6 s - 0.36
---------------------------------
s^3 + 1.2 s^2 + 0.7406 s + 0.2734
2. Результаты исследования
-адрес файла tf.m:
C:\Program Files\MATLAB\R2009b\toolbox\control\control\@tf\tf.m % tf constructor
-нули передаточной функции
z =
-0.6000
0.3000
-полюса передаточной функции
p =
-0.7000
-0.2500 + 0.5728i
-0.2500 - 0.5728i
-коэффициент усиления звена в установившемся режиме
k =
-1.3168
-полоса пропускаемой системы
b = 2.2532
-модель системы в пространстве состояний
a =
x1 x2 x3
x1 -1.2 -0.7406 -0.5468
x2 1 0 0
x3 0 0.5 0
b =
u1
x1 2
x2 0
x3 0
c =
x1 x2 x3
y1 1 0.3 -0.36
d =
u1
y1 0
-статический коэффициент усиления после изменения матрицы D
k1 = -1.3168
Связь между к и к1 объясняется тем что…….
-модель в форме «нули-полюса»
2 (s+0.6) (s-0.3)
-----------------------------
(s+0.7) (s^2 + 0.5s + 0.3906)
-коэффициенты демпфирования и частоты среза
wc =
0.6250
0.6250
0.7000;
ksi =
0.4000
0.4000
1.0000;
p =
-0.2500 + 0.5728i
-0.2500 - 0.5728i
-0.7000 .
-импульсные характеристики получились одинаковые потому что……..
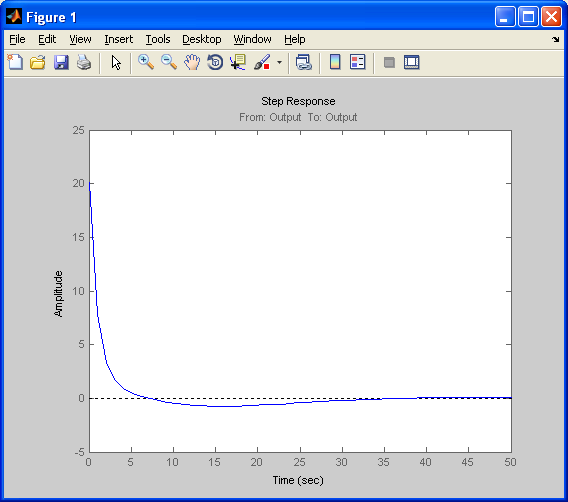
-переходные процессы исходной и модифицированной системы
-амплитудная частотная характеристика
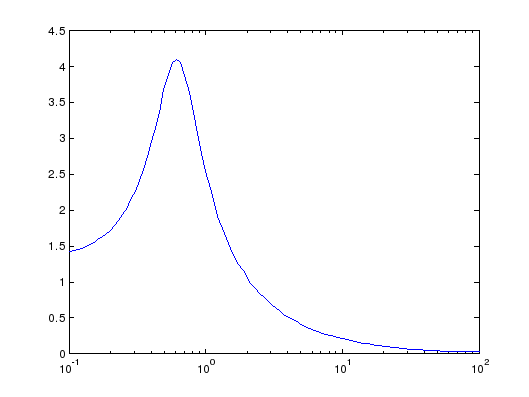
-для того ,чтобы найти статический коэффициент усиления по АХЧ, надо………..
- для того ,чтобы найти полосу пропускания по АХЧ,надо….
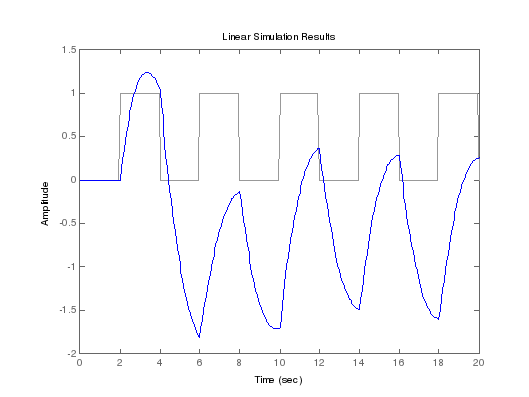
-реакция на сигнал, состоящий из прямоугольный импульсов
Лабораторная работа №2 Тема: Проектирование регулятора для линейной системы
Вариант 11

-
Описание системы
Движение судна описывается линейной математической моделью в виде передаточной функции
 ,где
к=0,08рад/сек, Ts=18,0сек,
,где
к=0,08рад/сек, Ts=18,0сек,
Привод моделируется как интегрирующее звено
 Tr=1сек,
Tr=1сек,
Охваченное единичной отрицательной обратной связью. Модель измерительного устройства представляет собой апериодическое звено с передаточной функцией
 Tос=5сек
Tос=5сек
-
Исследование разомкнутой системы
-Передаточная функция рулевого устройства
-Передаточная функция последовательного соединения объекта с приводом

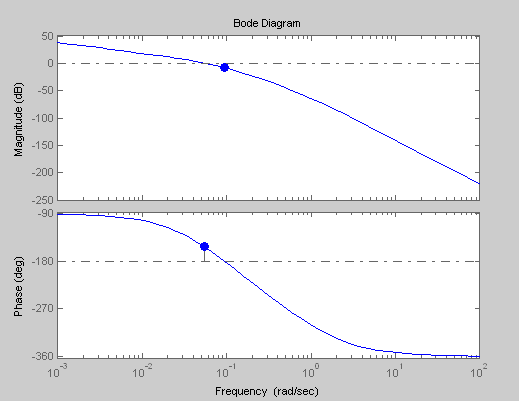
-ЛАФЧХ разомкнутой системы
-
Исследование системы с пропорциональным регулятором
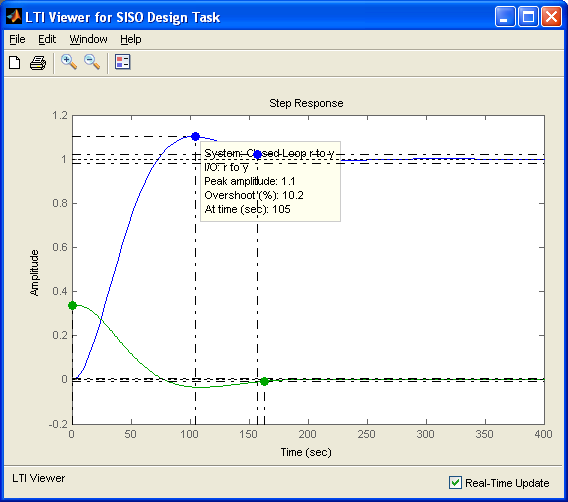
-Переходная функция замкнутой системы

-Для обеспечения перерегулирования не более 10% требуется уменьшить коэффициент регулятора до значения C(s)= 0.33826

4. Исследование системы с пропорционально-дифференциальным(ПД-)
4.1 Регулятор ,обеспечивающий перерегулирование 10%
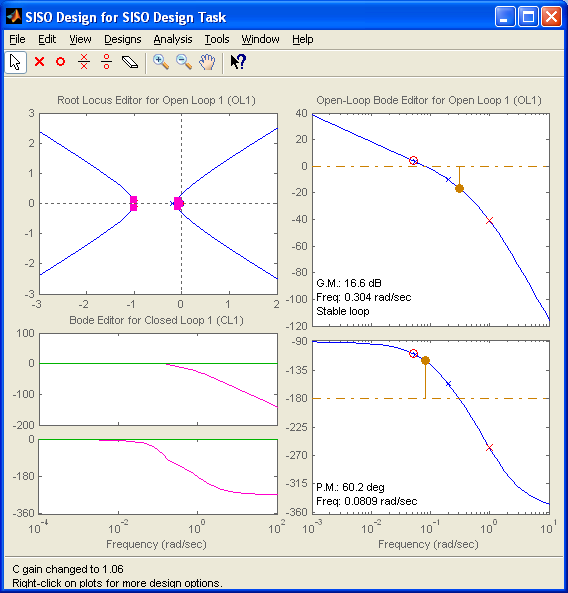
-Для обеспечения перерегулирования 10% требуется выбрать Кс=1.0578
-Переходная функция скорректированной замкнутой системы
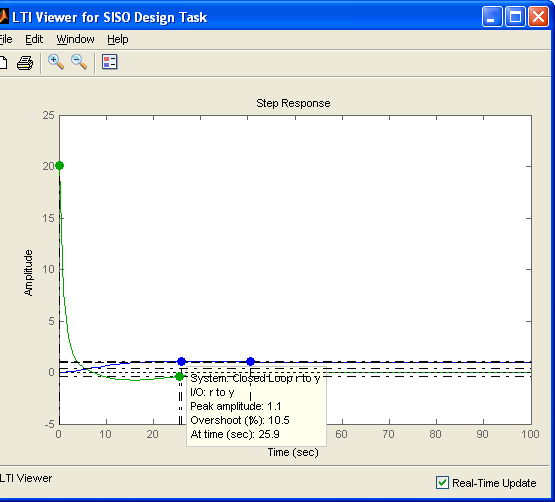
Дополнительный коэффициент усиления равен 1.0578
Время=25.9
Запасы устойчивости из графика = 16,6дБ, 60,2гр
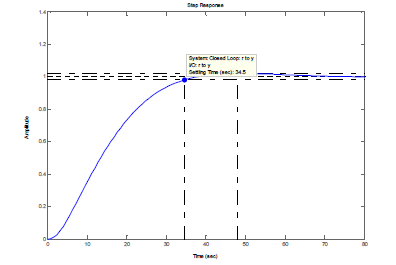
4.2 Регулятор, обеспечивающий кратчайший переходный процесс
-Для
обеспечения минимального времени
переходного процесса требуется выбрать
К=0,704Переходная функция скорректированной
системы
-Передаточная функция замкнутой системы
0.089327 s (s+0.05263) (s+0.05556) (s+0.2) (s+1)^2
--------------------------------------------------------------
s (s+1)^2 (s+0.05556) (s+0.05082) (s^2 + 0.1601s + 0.01737)
-Полюса передаточной функции
ans =
-1.0223 + 0.1425i
-1.0223 - 0.1425i
-0.0801 + 0.1047i
-0.0801 - 0.1047i
-0.0508
-Передаточная функция замкнутой системы от входа к сигналу управления
20.0986 s (s+0.05263) (s+0.05556) (s+0.2) (s+1)
------------------------------------------------------------
(s+0.05082) (s^2 + 0.1601s + 0.01737) (s^2 + 2.045s + 1.065)
-Изменение сигнала управления при единичном ступенчатом входном сигнале