Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Сибирский государственный индустриальный университет»
Кафедра автоматизации и информационных систем
Курсовая работа
по дисциплине: современные проблемы моделирования систем
«Численные исследования систем регулирования по отклонению с ПИ-регулятором»
Выполнил: ст. гр. ИСУ-М-14
Немцев А.Ю.
Проверил: д.т.н., проф.
Евтушенко В.Ф.
Новокузнецк
2015
Содержание
Введение..…………………………………………………………………………………3
1. Численные исследования систем регулирования по отклонению с ПИ-регулятором………………………………………………………………………………4
Заключение.………………………………………………………………………………15
Список литературы………………………………………………………………………16
Введение
Пропорционально-интегрально ПИ-регулятор – устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИ-регулятор формирует управляющий сигнал, являющийся суммой двух слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласование [1].
Цель данной курсовой работы исследовать влияние оптимальных настроек регулятора на критерий точности регулирования системы.
Задачи:
1
Исследовать
качество системы регулирования по
отклонению с ПИ-регулятором с настройками
по методике В.Я. Ротача
при значении соотношения постоянной
времени T к времени запаздывания τ
равного: 5, 10 и 20 для возмущений с различными
значениями весового
коэффициента
 .
Результаты представить в таблице.
.
Результаты представить в таблице.
2
Исследовать
качество системы регулирования по
отклонению с ПИ-регулятором с оптимальными
в смысле минимума среднеквадратичного
критерия (СКО) качества настройками при
значении соотношения постоянной времени
T к времени запаздывания τ равного: 5, 10
и 20 для возмущений с различными значениями
весового
коэффициента
 .
Результаты представить в таблице.
.
Результаты представить в таблице.
3
Исследовать влияние оптимальных
настройки
регулятора на качество системы
регулирования,
путём сравнения результатов экспериментов
(с оптимальными и инженерными настройками
регулятора) для соотношения T к τ: 5, 10 и
20 для возмущений с различными значениями
весового
коэффициента
 ,
представить результаты исследования
в табличном виде.
,
представить результаты исследования
в табличном виде.
1 Численные исследования систем регулирования по отклонению с пи-регулятором
На сегодняшний день методика построения регуляторов профессора Ротача В. Я. [2] для систем автоматического регулирования (САР) по отклонению доказала свою эффективность и простоту применения. Данная методика позволяет сразу определить и структуру, и параметры закона регулирования.
Разнообразие промышленных объектов автоматизации в большинстве случаев структурно можно представить в виде модели инерционного звена первого порядка с запаздыванием. Для таких объектов методика выбора типовых регуляторов однозначно рекомендует использовать ПИ-регулятор. На практике выбранный регулятор можно настраивать либо по инженерной методике В.Я. Ротача [2], либо осуществляя поисковую оптимизацию параметров регулятора. Например, возможно оптимизировать настройки регулятора в плане минимума СКО системы различными методами. Также возможно использовать и другие методики настройки регулятора, которые на текущем этапе исследования не рассматриваются.
На основании выше сказанного было принято решение проводить исследования САР по отклонению с ПИ-регулятором, настроенным по инженерной методике [2] и с оптимальными в плане минимума ошибки регулирования параметрами. Оптимизация настроек производилась с помощью встроенной процедуры программы Excel, основанной на нелинейном методе обобщенного понижающего градиента (ОПГ).
Дано:
1 Структура системы регулирования с приведённым к выходу объекта возмущения (рисунок 1).
Объект регулирования – последовательное соединение звена чистого запаздывания и инерционного звена первого порядка.
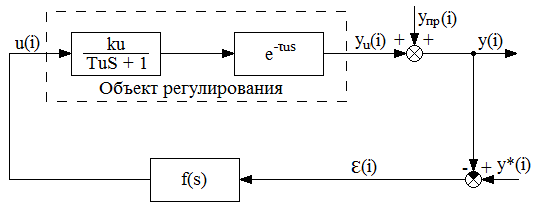
Рисунок 1 – Структура системы регулирования,
где u(i) - регулирующее воздействие,
yпр(i) - неконтролируемые возмущения,
y(i) - выходная величина,
y*(i) - заданный уровень выходной величины,
 (i)
- ошибка регулирования,
(i)
- ошибка регулирования,
Tu - постоянной времени,
τu - времени запаздывания,
ku – коэффициент пропорциональности.
f(s) - закон регулирования.
2 Приведенные к выходу объекта возмущения − стационарный динамический ряд с заданной автокорреляционной функции(АКФ):
 (1).
(1).
Подписи к формуле (у вас есть примеры постановок задачи, там все формулы и рисунки аналогичные и прекрасно все расписано, скопировать вы можете оттуда)
3 Закон регулирования: ПИ-регулятор с передаточной функцией:
 (2);
(2);
 (3);
(3);
 (4),
(4),
где kи - коэффициент пропорциональности,
Tu - постоянная времени.
с
оптимальными в смысле минимума
среднеквадратичного отклонения (СКО)
настройками, начальные значения
параметров регулятора
 и
и
 определены по методике В.Я.
Ротача [2].
определены по методике В.Я.
Ротача [2].
4 Начальные условия:
 ; (5);
; (5);
 ; (6);
; (6);
 ; (7);
; (7);
 (8).
(8).
5 Среднеквадратичный критерий точности регулирования:
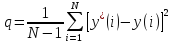 (9),
(9),
где N – интервал моделирования.
Требуется:
1 Исследовать влияние оптимальных настроек регулятора на критерий точности регулирования системы.
Условия моделирования:
1
Интервал моделирования
 ,
шаг дискретизации
,
шаг дискретизации .
.
2
Диапазон изменения параметров модели
объекта:
 ;
;
 ;
;
 значения
параметра меняем с шагом
значения
параметра меняем с шагом
 .
Соотношение
.
Соотношение
 .
.
3
Диапазон изменения параметра приведенных
к выходу возмущений:
 ;
;
 .
.
Результаты решения задачи.
Исследовать
влияние оптимальных настройки регулятора
на качество системы регулирования для
соотношений T к τ – 5, 10 и 20 для возмущений
с различными значениями параметра
 провели около двухсот
экспериментов. Результаты представлены
в таблице 1.
провели около двухсот
экспериментов. Результаты представлены
в таблице 1.
Таблица 1 - Результаты моделирования ПИ-регулятора.
|
№ |
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
5 |
1 5 |
0,05 |
1 |
4,980 |
5,000 |
0,312 |
0,312 |
0,0 |
|
2 |
25 |
4,054 |
0,790 |
0,805 |
1,9 |
|||||
|
3 |
45 |
3,525 |
1,012 |
1,061 |
4,6 |
|||||
|
4 |
65 |
3,101 |
1,128 |
1,219 |
7,4 |
|||||
|
5 |
85 |
2,768 |
1,186 |
1,316 |
9,9 |
|||||
|
6 |
105 |
2,494 |
1,211 |
1,375 |
11,9 |
|||||
|
7 |
125 |
2,355 |
1,220 |
1,407 |
13,3 |
|||||
|
8 |
145 |
2,318 |
1,221 |
1,427 |
14,4 |
|||||
|
9 |
165 |
2,213 |
1,219 |
1,436 |
15,1 |
|||||
|
10 |
185 |
1,994 |
1,210 |
1,433 |
15,5 |
|||||
|
11 |
205 |
1,810 |
1,197 |
1,420 |
15,7 |
|||||
|
12 |
225 |
1,714 |
1,183 |
1,403 |
15,7 |
|||||
|
13 |
245 |
1,622 |
1,170 |
1,390 |
15,8 |
|||||
|
14 |
15 |
0,07 |
4,311 |
0,706 |
0,712 |
0,9 |
||||
|
15 |
35 |
3,479 |
1,030 |
1,081 |
4,7 |
|||||
|
16 |
55 |
2,906 |
1,161 |
1,268 |
8,5 |
|||||
|
17 |
75 |
2,537 |
1,207 |
1,365 |
11,6 |
|||||
|
18 |
95 |
2,252 |
1,216 |
1,405 |
13,4 |
|||||
|
19 |
115 |
2,028 |
1,208 |
1,424 |
15,2 |
|||||
|
20 |
135 |
1,912 |
1,194 |
1,424 |
16,2 |
|||||
|
21 |
155 |
1,873 |
1,181 |
1,418 |
16,7 |
|||||
|
22 |
175 |
1,860 |
1,169 |
1,406 |
16,9 |
|||||
|
23 |
195 |
1,861 |
1,158 |
1,388 |
16,6 |
|||||
|
24 |
215 |
1,852 |
1,148 |
1,366 |
15,9 |
|||||
|
25 |
235 |
1,814 |
1,139 |
1,344 |
15,3 |
|||||
|
26 |
245 |
1,796 |
1,134 |
1,334 |
14,9 |
|||||
|
27 |
5 |
0,10 |
4,881 |
0,437 |
0,437 |
0,0 |
||||
|
28 |
25 |
3,812 |
0,936 |
0,961 |
2,6 |
|||||
|
29 |
45 |
2,889 |
1,159 |
1,263 |
8,2 |
|||||
|
30 |
65 |
2,403 |
1,209 |
1,379 |
12,3 |
|||||
|
31 |
85 |
2,089 |
1,208 |
1,414 |
14,5 |
|||||
|
32 |
105 |
1,917 |
1,191 |
1,410 |
15,5 |
|||||
|
33 |
125 |
1,847 |
1,173 |
1,400 |
16,2 |
|||||
|
34 |
145 |
1,806 |
1,156 |
1,383 |
16,4 |
|||||
|
35 |
165 |
1,781 |
1,142 |
1,356 |
15,8 |
|||||
|
36 |
185 |
1,777 |
1,130 |
1,327 |
14,8 |
|||||
|
37 |
205 |
1,777 |
1,119 |
1,304 |
14,1 |
|||||
|
38 |
225 |
1,774 |
1,111 |
1,285 |
13,6 |
|||||
|
39 |
245 |
1,766 |
1,103 |
1,267 |
12,9 |









 ,%
,%
|
77 |
1 |
15 |
5 |
0,20 |
1 |
3,493 |
5 |
1,042 |
1,080 |
3,5 |
|
79 |
1 |
35 |
5 |
0,20 |
1 |
2,236 |
5 |
1,200 |
1,371 |
12,4 |
|
81 |
1 |
55 |
5 |
0,20 |
1 |
1,930 |
5 |
1,180 |
1,389 |
15,1 |
|
83 |
1 |
75 |
5 |
0,20 |
1 |
1,751 |
5 |
1,150 |
1,355 |
15,2 |
|
85 |
1 |
95 |
5 |
0,20 |
1 |
1,719 |
5 |
1,125 |
1,313 |
14,4 |
|
87 |
1 |
115 |
5 |
0,20 |
1 |
1,753 |
5 |
1,107 |
1,276 |
13,2 |
|
89 |
1 |
135 |
5 |
0,20 |
1 |
1,792 |
5 |
1,094 |
1,252 |
12,6 |
|
91 |
1 |
155 |
5 |
0,20 |
1 |
1,790 |
5 |
1,084 |
1,228 |
11,7 |
|
93 |
1 |
175 |
5 |
0,20 |
1 |
1,740 |
5 |
1,075 |
1,200 |
10,4 |
|
95 |
1 |
195 |
5 |
0,20 |
1 |
1,647 |
5 |
1,068 |
1,178 |
9,4 |
|
97 |
1 |
215 |
5 |
0,20 |
1 |
1,588 |
5 |
1,061 |
1,164 |
8,9 |
|
99 |
1 |
235 |
5 |
0,20 |
1 |
1,571 |
5 |
1,055 |
1,154 |
8,5 |
|
101 |
1 |
10 |
10 |
0,05 |
1 |
9,931 |
10 |
0,312 |
0,312 |
0,0 |
|
103 |
1 |
50 |
10 |
0,05 |
1 |
7,602 |
10 |
0,781 |
0,805 |
3,1 |
|
105 |
1 |
90 |
10 |
0,05 |
1 |
6,307 |
10 |
0,989 |
1,061 |
6,8 |
|
107 |
1 |
130 |
10 |
0,05 |
1 |
5,281 |
10 |
1,090 |
1,219 |
10,5 |
|
109 |
1 |
170 |
10 |
0,05 |
1 |
4,524 |
10 |
1,137 |
1,316 |
13,6 |
|
111 |
1 |
210 |
10 |
0,05 |
1 |
4,073 |
10 |
1,156 |
1,375 |
15,9 |
|
113 |
1 |
250 |
10 |
0,05 |
1 |
3,760 |
10 |
1,162 |
1,407 |
17,4 |
|
115 |
1 |
290 |
10 |
0,05 |
1 |
3,303 |
10 |
1,160 |
1,427 |
18,7 |
|
117 |
1 |
330 |
10 |
0,05 |
1 |
2,923 |
10 |
1,151 |
1,436 |
19,9 |
|
119 |
1 |
370 |
10 |
0,05 |
1 |
2,678 |
10 |
1,140 |
1,433 |
20,4 |
|
121 |
1 |
410 |
10 |
0,05 |
1 |
2,473 |
10 |
1,129 |
1,420 |
20,5 |
|
123 |
1 |
450 |
10 |
0,05 |
1 |
2,389 |
10 |
1,120 |
1,403 |
20,2 |
|
125 |
1 |
490 |
10 |
0,05 |
1 |
2,414 |
10 |
1,112 |
1,390 |
20,0 |
|
127 |
1 |
30 |
10 |
0,07 |
1 |
8,199 |
10 |
0,701 |
0,712 |
1,5 |
|
129 |
1 |
70 |
10 |
0,07 |
1 |
6,188 |
10 |
1,006 |
1,081 |
6,9 |
|
131 |
1 |
110 |
10 |
0,07 |
1 |
4,839 |
10 |
1,117 |
1,268 |
11,9 |
|
133 |
1 |
150 |
10 |
0,07 |
1 |
3,970 |
10 |
1,151 |
1,365 |
15,7 |
|
135 |
1 |
190 |
10 |
0,07 |
1 |
3,385 |
10 |
1,154 |
1,405 |
17,9 |
|
137 |
1 |
230 |
10 |
0,07 |
1 |
3,117 |
10 |
1,146 |
1,424 |
19,5 |
|
139 |
1 |
270 |
10 |
0,07 |
1 |
3,004 |
10 |
1,137 |
1,424 |
20,2 |
|
141 |
1 |
310 |
10 |
0,07 |
1 |
2,932 |
10 |
1,128 |
1,418 |
20,4 |
|
143 |
1 |
350 |
10 |
0,07 |
1 |
2,850 |
10 |
1,119 |
1,406 |
20,4 |
|
145 |
1 |
390 |
10 |
0,07 |
1 |
2,783 |
10 |
1,111 |
1,388 |
19,9 |
|
147 |
1 |
430 |
10 |
0,07 |
1 |
2,758 |
10 |
1,103 |
1,366 |
19,2 |
|
149 |
1 |
470 |
10 |
0,07 |
1 |
2,770 |
10 |
1,097 |
1,344 |
18,4 |
|
151 |
1 |
10 |
10 |
0,10 |
1 |
9,697 |
10 |
0,437 |
0,437 |
0,0 |
|
153 |
1 |
50 |
10 |
0,10 |
1 |
6,305 |
10 |
0,999 |
1,064 |
6,1 |
|
155 |
1 |
90 |
10 |
0,10 |
1 |
4,449 |
10 |
1,133 |
1,303 |
13,1 |
|
157 |
1 |
130 |
10 |
0,10 |
1 |
3,533 |
10 |
1,153 |
1,393 |
17,2 |
|
159 |
1 |
170 |
10 |
0,10 |
1 |
3,097 |
10 |
1,144 |
1,414 |
19,09 |
|
161 |
1 |
210 |
10 |
0,10 |
1 |
2,907 |
10 |
1,131 |
1,408 |
19,68 |
|
163 |
1 |
250 |
10 |
0,10 |
1 |
2,797 |
10 |
1,118 |
1,397 |
19,99 |
|
165 |
1 |
290 |
10 |
0,10 |
1 |
2,756 |
10 |
1,106 |
1,377 |
19,64 |
|
167 |
1 |
330 |
10 |
0,10 |
1 |
2,728 |
10 |
1,097 |
1,348 |
18,65 |
|
169 |
1 |
370 |
10 |
0,10 |
1 |
2,706 |
10 |
1,088 |
1,32 |
17,56 |
|
171 |
1 |
410 |
10 |
0,10 |
1 |
2,702 |
10 |
1,081 |
1,299 |
16,74 |
|
173 |
1 |
450 |
10 |
0,10 |
1 |
2,704 |
10 |
1,075 |
1,281 |
16,02 |
|
175 |
1 |
490 |
10 |
0,10 |
1 |
2,701 |
10 |
1,07 |
1,263 |
15,25 |
|
177 |
1 |
30 |
10 |
0,20 |
1 |
6,17 |
10 |
1,022 |
1,08 |
5,403 |
|
179 |
1 |
70 |
10 |
0,20 |
1 |
3,479 |
10 |
1,146 |
1,371 |
16,4 |
|
181 |
1 |
110 |
10 |
0,20 |
1 |
2,86 |
10 |
1,127 |
1,385 |
18,64 |
|
183 |
1 |
150 |
10 |
0,20 |
1 |
2,704 |
10 |
1,104 |
1,359 |
18,74 |
|
185 |
1 |
190 |
10 |
0,20 |
1 |
2,717 |
10 |
1,088 |
1,324 |
17,86 |
|
187 |
1 |
230 |
10 |
0,20 |
1 |
2,696 |
10 |
1,075 |
1,294 |
16,95 |
|
189 |
1 |
270 |
10 |
0,20 |
1 |
2,573 |
10 |
1,065 |
1,277 |
16,62 |
|
191 |
1 |
310 |
10 |
0,20 |
1 |
2,461 |
10 |
1,056 |
1,256 |
15,94 |
|
193 |
1 |
350 |
10 |
0,20 |
1 |
2,422 |
10 |
1,05 |
1,233 |
14,88 |
|
195 |
1 |
390 |
10 |
0,20 |
1 |
2,438 |
10 |
1,044 |
1,215 |
14,04 |
|
197 |
1 |
430 |
10 |
0,20 |
1 |
2,48 |
10 |
1,04 |
1,204 |
13,58 |
|
199 |
1 |
470 |
10 |
0,20 |
1 |
2,515 |
10 |
1,037 |
1,197 |
13,32 |
|
201 |
1 |
20 |
20 |
0,05 |
1 |
19,78 |
20 |
0,312 |
0,312 |
0,006 |
|
203 |
1 |
100 |
20 |
0,05 |
1 |
14,44 |
20 |
0,774 |
0,805 |
3,924 |
|
205 |
1 |
180 |
20 |
0,05 |
1 |
11,38 |
20 |
0,97 |
1,061 |
8,579 |
|
207 |
1 |
260 |
20 |
0,05 |
1 |
8,958 |
20 |
1,061 |
1,219 |
12,99 |
|
209 |
1 |
340 |
20 |
0,05 |
1 |
7,358 |
20 |
1,099 |
1,316 |
16,45 |
|
211 |
1 |
420 |
20 |
0,05 |
1 |
6,253 |
20 |
1,114 |
1,375 |
19,03 |
|
213 |
1 |
500 |
20 |
0,05 |
1 |
5,142 |
20 |
1,114 |
1,407 |
20,84 |
|
215 |
1 |
580 |
20 |
0,05 |
1 |
4,465 |
20 |
1,108 |
1,427 |
22,32 |
|
217 |
1 |
660 |
20 |
0,05 |
1 |
4,086 |
20 |
1,101 |
1,436 |
23,29 |
|
219 |
1 |
740 |
20 |
0,05 |
1 |
3,998 |
20 |
1,095 |
1,433 |
23,59 |
|
221 |
1 |
820 |
20 |
0,05 |
1 |
4,027 |
20 |
1,089 |
1,42 |
23,29 |
|
223 |
1 |
900 |
20 |
0,05 |
1 |
4,084 |
20 |
1,085 |
1,403 |
22,7 |
|
225 |
1 |
980 |
20 |
0,05 |
1 |
4,146 |
20 |
1,081 |
1,39 |
22,26 |
|
227 |
1 |
60 |
20 |
0,07 |
1 |
15,77 |
20 |
0,697 |
0,712 |
2,114 |
|
229 |
1 |
140 |
20 |
0,07 |
1 |
11,06 |
20 |
0,987 |
1,081 |
8,718 |
|
231 |
1 |
220 |
20 |
0,07 |
1 |
7,905 |
20 |
1,083 |
1,268 |
14,59 |
|
233 |
1 |
300 |
20 |
0,07 |
1 |
6,036 |
20 |
1,108 |
1,365 |
18,87 |
|
234 |
1 |
340 |
20 |
0,07 |
1 |
5,52 |
20 |
1,11 |
1,389 |
20,14 |
|
235 |
1 |
380 |
20 |
0,07 |
1 |
5,208 |
20 |
1,109 |
1,405 |
21,06 |
|
237 |
1 |
460 |
20 |
0,07 |
1 |
4,83 |
20 |
1,104 |
1,424 |
22,47 |
|
239 |
1 |
540 |
20 |
0,07 |
1 |
4,557 |
20 |
1,097 |
1,424 |
22,96 |
|
241 |
1 |
620 |
20 |
0,07 |
1 |
4,395 |
20 |
1,091 |
1,418 |
23,07 |
|
243 |
1 |
700 |
20 |
0,07 |
1 |
4,341 |
20 |
1,084 |
1,406 |
22,89 |
|
245 |
1 |
780 |
20 |
0,07 |
1 |
4,334 |
20 |
1,079 |
1,388 |
22,25 |
|
247 |
1 |
860 |
20 |
0,07 |
1 |
4,332 |
20 |
1,074 |
1,366 |
21,4 |
|
249 |
1 |
940 |
20 |
0,07 |
1 |
4,321 |
20 |
1,069 |
1,344 |
20,45 |
|
251 |
1 |
20 |
20 |
0,10 |
1 |
19,24 |
20 |
0,437 |
0,437 |
0,065 |
|
253 |
1 |
100 |
20 |
0,10 |
1 |
11,3 |
20 |
0,982 |
1,064 |
7,741 |
|
255 |
1 |
180 |
20 |
0,10 |
1 |
7,077 |
20 |
1,096 |
1,303 |
15,91 |
|
257 |
1 |
260 |
20 |
0,10 |
1 |
5,352 |
20 |
1,109 |
1,393 |
20,39 |
|
259 |
1 |
340 |
20 |
0,10 |
1 |
4,697 |
20 |
1,102 |
1,414 |
22,09 |
|
261 |
1 |
420 |
20 |
0,10 |
1 |
4,402 |
20 |
1,092 |
1,408 |
22,43 |
|
263 |
1 |
500 |
20 |
0,10 |
1 |
4,249 |
20 |
1,083 |
1,397 |
22,49 |
|
265 |
1 |
580 |
20 |
0,10 |
1 |
4,166 |
20 |
1,075 |
1,377 |
21,94 |
|
267 |
1 |
660 |
20 |
0,10 |
1 |
4,123 |
20 |
1,068 |
1,348 |
20,79 |
|
269 |
1 |
740 |
20 |
0,10 |
1 |
4,079 |
20 |
1,062 |
1,32 |
19,56 |
|
271 |
1 |
820 |
20 |
0,10 |
1 |
4,009 |
20 |
1,057 |
1,299 |
18,63 |
|
273 |
1 |
900 |
20 |
0,10 |
1 |
3,937 |
20 |
1,052 |
1,281 |
17,83 |
|
275 |
1 |
980 |
20 |
0,10 |
1 |
3,888 |
20 |
1,048 |
1,263 |
16,99 |
|
277 |
1 |
60 |
20 |
0,20 |
1 |
10,91 |
20 |
1,005 |
1,08 |
6,968 |
|
279 |
1 |
140 |
20 |
0,20 |
1 |
5,298 |
20 |
1,105 |
1,371 |
19,39 |
|
281 |
1 |
220 |
20 |
0,20 |
1 |
4,337 |
20 |
1,09 |
1,385 |
21,35 |
|
283 |
1 |
300 |
20 |
0,20 |
1 |
4,174 |
20 |
1,074 |
1,359 |
20,97 |
|
285 |
1 |
380 |
20 |
0,20 |
1 |
3,936 |
20 |
1,061 |
1,324 |
19,86 |
|
287 |
1 |
460 |
20 |
0,20 |
1 |
3,719 |
20 |
1,051 |
1,294 |
18,82 |
|
289 |
1 |
540 |
20 |
0,20 |
1 |
3,677 |
20 |
1,043 |
1,277 |
18,28 |
|
291 |
1 |
620 |
20 |
0,20 |
1 |
3,729 |
20 |
1,038 |
1,256 |
17,38 |
|
293 |
1 |
700 |
20 |
0,20 |
1 |
3,762 |
20 |
1,034 |
1,233 |
16,15 |
|
295 |
1 |
780 |
20 |
0,20 |
1 |
3,731 |
20 |
1,031 |
1,215 |
15,19 |
|
297 |
1 |
860 |
20 |
0,20 |
1 |
3,666 |
20 |
1,028 |
1,204 |
14,66 |
|
299 |
1 |
940 |
20 |
0,20 |
1 |
3,59 |
20 |
1,025 |
1,197 |
14,34 |
,где
 -значения
параметра, рассчитанное по формуле В.Я.
Ротача [2],
-значения
параметра, рассчитанное по формуле В.Я.
Ротача [2],
 -
оптимальное значение,
-
оптимальное значение,
 -
значение критерия точности для
ПИ-регулятора с параметрами по методу
В.Я. Ротача [2],
-
значение критерия точности для
ПИ-регулятора с параметрами по методу
В.Я. Ротача [2],
 -
значение критерия для регулятора с
оптимальными настройками,
-
значение критерия для регулятора с
оптимальными настройками,