

3.4 План скоростей механизма
Определим скорость точки А по величине.
VA = lOA* ω1= 0,048 * 200 = 9,6 м/с.
Скорость точки С по величине равна скорости точки А.
Примем длину вектора ра, изображающего на чертеже скорость точки А, равной 24 мм. Это число выбираем кратным величине скорости точки А. Тогда масштабный коэффициент для построения плана скоростей будет следующим:
µv = VA/ра=9,6 / 24 = 0,4 (м/с) / мм.
Изобразим на чертеже вектор ра, направленный перпендикулярно отрезку ОА, учитывая направление вращения звена 1. Точкарявляется полюсом плана скоростей. Поместим в полюс р точкуо, соответствующую неподвижной точке О механизма.
Составим векторное уравнение для скорости точки В.
VB = VA + VBA,
где VB- скорость точки В, направленная параллельно осих;
VA- скорость точки А;
VBA~ скорость точки В при относительном вращении звена 2 вокруг точки А (направлена перпендикулярно АВ).
Данное векторное уравнение решим графически. Для этого на плане скоростей проведём через точку а прямую линию, перпендикулярную АВ, а через полюс р- прямую, параллельную осих. Точка пересечения этих прямых даст точкуb- конец вектора скорости точки В.
Точку S2на плане скоростей найдём, используя свойство подобия планов.
![]() ,
откудаas2
= аb
,
откудаas2
= аb![]() = 12
= 12![]() = 4 мм
= 4 мм
где as2иab- длины отрезков на плане скоростей,
AS2иАВ- длины отрезков на плане положения.
Изобразим на чертеже вектор рс, изображающий скорость точки С и направленный перпендикулярно отрезку ОС, учитывая направление вращения звена 1. Причём длины вектороврсираодинаковы.
Составим векторное уравнение для скорости точки D.
VD= VC + VDC,
где VD- скорость точки D, направленная параллельно осих,
VC- скорость точки С,
VDC~ скорость точки D при относительном вращении звена 4 вокруг точки С (направлена перпендикулярно CD).
Данное векторное уравнение решим графически. Для этого на плане скоростей проведём через точку с прямую линию, перпендикулярную CD, а через полюс р- прямую, параллельную осих. Точка пересечения этих прямых даст точкуd- конец вектора скорости точки D.
Точку s4на плане скоростей найдём, используя свойство подобия планов.
![]() ,
откудаCS4
= cd
,
откудаCS4
= cd ![]() = 20
= 20![]() = 6,6 мм,
= 6,6 мм,
где CS4иcd- длины отрезков на плане скоростей,
CS4иCD- длины отрезков на плане положения.
Определим скорости точек В, D, S2и S4механизма по величине.
VB = рb * µv= 22 * 0,4 = 8,8 м/с,
VD = pd * µv= 15 * 0,4 = 6,0 м/с,
Vs2 =ps2· µv= 22 * 0,4 = 8,8 м/с,
Vs4 = ps4· µv= 18 * 0,4 = 7,2 м/с,
где pb, pd, ps2иps4- длины отрезков на плане скоростей.
Определим величины относительных скоростей.
VBA = ab * µv= 12 * 0,4 = 4,8 м/с,
VDC = cd * µv= 20 * 0,4 = 8,0 м/с,
где abиcd- длины отрезков на плане скоростей.
Определим угловые скорости звеньев 2 и 4.
ω2 = VBA/ lAB= 4,8 / 0,192 = 25 рад/с,
ω4 = VDC / lICD= 8,0 / 0,192 = 41 рад/с.
Направления угловых скоростей ω2 иω4определяются направлениями относительных скоростейVBA иVDC, как это показано на рисунке 3.1.
3.5 План ускорений механизма
Определим ускорение точки А. Так как по условию ω1 = const, то
аА = anA = 1OA * ω21 = 0,048 * 2002= 1920 м/с2.
Примем длину отрезка πa, изображающего на чертеже ускорение точки А, равной 38,4 мм. Это число выбираем кратным величине ускорения точки А. Тогда масштабный коэффициент для построения плана ускорений будет следующим:
µa = аА / πa= 1920 / 38,4 = 50 (м/с2) / мм.
Изобразим на рисунке 3.1 вектор πa, направленный параллельно ОА (при этом учитывая, что вектораАнаправлен от точки А к точке О). В полюсπплана ускорений поместим точкуо, соответствующую неподвижной точке О механизма.
Ускорение точки С по величине равно ускорению точки А. На рисунке 3.1 изобразим вектор πc, изображающий ускорение точки С и направленный параллельно ОС (при этом учитывая, что вектораCнаправлен от точки С к точке О).
Для определения ускорения точки В составим векторное уравнение
аB=аА+аnBА+аtBА,
где аА- вектор ускорения точки А,
аnBАиаtBА- векторы нормального и касательного ускорений точки В при вращении звена 2 вокруг точки А. ВектораnBАнаправлен параллельно АВ (от точки В к точке А). ВектораtBАнаправлен перпендикулярно АВ.
Определим по величине ускорение аnBА
аnBА =V2BA/ lAB= 4,82 / 0,192 = 120 м/с2.
Определим длину вектора an1, изображающего ускорениеаnBАна плане ускорений с учётом масштабного коэффициента.
an1=аnBА/µa= 120 / 50 = 2,4 мм.
Векторное уравнение, связывающее ускорение точек В и А, решим графически. Поместим в точку ана плане ускорений начало вектораan1, изображающего ускорениеаnBА. Через точкуn1проведём прямую линию перпендикулярную АВ, по которой будет проходить вектораtBА.Через точку π проведём прямую линию параллельную осих, по которой проходит вектораB. Точка пересечения этих прямых даст конец вектораπb, изображающего ускорениеаB.
Точку s2на плане ускорений найдём по свойству подобия планов из соотношения
as2
= ab![]() = 33
= 33![]() = 11 мм,
= 11 мм,
где as2иаЬ- длины отрезков на плане ускорений,
AS2и АВ - длины отрезков на плане положения механизма.
Для определения ускорения точки D составим векторное уравнение
аD=аC +аnDC +аtDC,
где аC- вектор ускорения точки С,
аnDC иаtDC- векторы нормального и касательного ускорений точки D при вращении звена 4 вокруг точки С. ВектораnDCнаправлен параллельно CD (от точки D к точке С). ВектораtDCнаправлен перпендикулярно CD.
Определим по величине ускорение аnDC
аnDC = V2DC / lCD= 82 / 0,192 = 333 м/с2.
Определим длину вектора cn2, изображающего ускорениеаnDCна плане ускорений с учётом масштабного коэффициента.
cn2 = аnDC / µa= 333 / 50 = 6,6 мм.
Векторное уравнение, связывающее ускорение точек С и D, решим графически. Поместим в точку сна плане ускорений начало вектораcn2, изображающего ускорениеаnDC. Через точкуn2 проведём прямую линию перпендикулярную CD, по которой будет проходить вектораtDC. Через точку π проведём прямую линию параллельную осих, по которой проходит вектораDТочка пересечения этих прямых даст конец вектораπd, изображающего ускорениеаD.
Точку s4на плане ускорений найдём по свойству подобия планов из соотношения
cs4
= сd![]() = 18
= 18![]() = 6 мм,
= 6 мм,
где cs4иcd - длины отрезков на плане ускорений,
CS4и CD - длины отрезков на плане положения механизма.
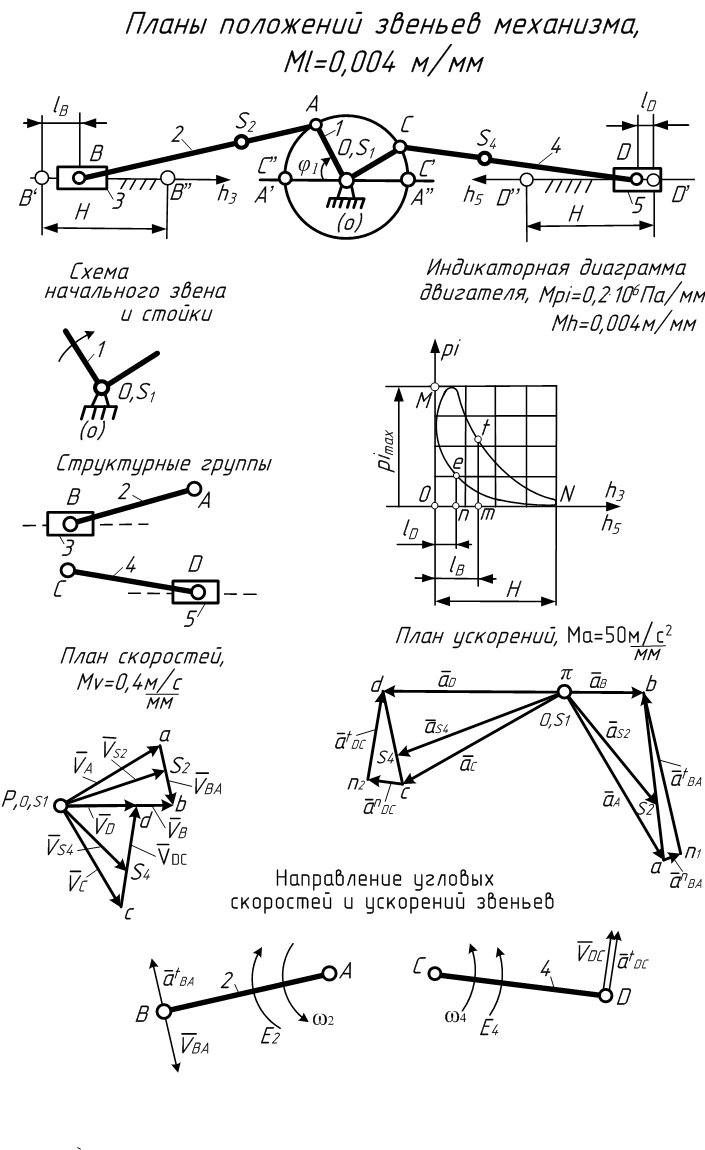

Рисунок 3.1. Механизм двигателя внутреннего сгорания
Определим ускорения точек механизма по величине:
аB = πb * µa = 15 * 50 = 750 м/с2,
ad = πd * µa = 36 * 50 = 1800 м/с2,
aS2 = πs2 * µa= 28 * 50 = 1400 м/с2,
aS4 = πs4* µa= 35 *50 = 1750 м/с ,
где πb , πd, πs2 , πs4- длины отрезков на плане ускорений механизма.
Определим величины тангенциальных ускорений аtBАиаtDC
аtBА =n1b* µa= 32 * 50 = 1600 м/с2,
аtDC =n2d * µa= 17 * 50 = 850 м/с2,
где n1bиn2d- длины отрезков на плане ускорений механизма.
Определим угловые ускорения звеньев 2 и 4 по величине:
ε2=аtBА/ lAB= 1600 / 0,192 = 8333 рад/с2,
ε4=аtDC/lCD= 850 / 0,192 = 4427 рад/с2.
Направления угловых ускорений s2иs4определяются направлениями касательных ускоренийаtBАиаtDC, как это показано на рисунке 1.1.