

Лекции СЭС
.pdf- ош команда «Повысить напряжение».
Рис.4.13. Автоматическое регулирование напряжения в ЦП по закону стабилизации
Величина ступени регулирования Е зависит от конструкции трансформатора ( указывается в паспорте на трансформатор), обычно лежит в пределах E (1,2 1,8)% .
Зоной нечувствительности (мѐртвой зоной) ε называют некоторый диапазон изменения контролируемого напряжения, в котором не происходит срабатывание регулирующей аппаратуры. Величина зоны нечувствительности ε определяет точность регулирования, которая обозначается ±δ где δ% - величина, равная половине зоны нечувствительности. Зона нечувствительности регулятора должна быть больше ступени регулирования Е на величину, порядка 0,2-0,5%, т.к. иначе регулятор будет работать неустойчиво, т.е. будет иметь место колебательный режим работы регулятора и переключающего устройства.
Из графика рис.4.13 видно, что несмотря на стабильный уровень напряжения в ЦП, напряжение на зажимах ЭП изменяется в зависимости от изменения тока нагрузки. Диапазон этих отклонений тем выше, чем больше сопротивление линий электропередачи Zл и чем больше разница между токами нагрузки в максимальном и минимальном режимах.
Рис.4.14 Процесс регулирования с помощью переключения отпаек трансформатора.

Выдержка времени в регуляторах служит для предотвращения их работы при кратковременных отклонениях напряжения от заданного значения. При увеличении выдержки времени уменьшается общее количество переключений, однако одновременно снижается и качество регулирования. При уменьшении выдержки времени качество регулирования повышается, однако при этом увеличивается частота переключений и их общее число. Это ухудшает условия работы переключающих устройств. Практически выдержка времени выбирается в пределах 1-3 мин.
Для оценки влияния указанных величин на точность регулирования рассмотрим процесс регулирования, изображѐнный на рис.4.14.
В начальный момент времени 0 регулируемое напряжение находилось внутри зоны нечувствительности регулятора (ε). Далее в момент времени 1,понижающееся напряжение вызвало срабатывание чувствительного органа регулятора и начался отсчѐт времени. По истечении выдержки времени t1 в момент 2 подаѐтся команда на переключение отпайки и через время t2 (время работы переключающего механизма) напряжение скачком возрастает на величину, определяемую ступенью регулирования (E) и вновь оказывается внутри зоны ε. В промежуток времени 4,5,6 происходит аналогичный процесс переключения с той лишь разницей, что переключатель возвращается в прежнее положение. В промежуток времени 7,8 произошло кратковременное понижение напряжения, на которое регулятор не среагировал, т.к. его выдержка времени t1 оказалась больше, чем длительность этого понижения напряжения t3.
Встречное регулирование напряжения.
При встречном регулировании стабильный уровень напряжения обеспечивается не на шинах ЦП, а в некоторой удаленной от ЦП точке электрической сети. Она называется ―контрольной‖ или ―фиктивной‖ точкой .
При этом автоматический регулятор обеспечивает с определенной степенью точности уровень напряжения на шинах ЦП, равный сумме напряжения уставки Uзад и потери напряжения от ЦП до фиктивной точки ΔU:
Uцп = Uзад + ΔU = Uзад + IZл.
Иначе говоря, напряжение в ЦП зависит от тока нагрузки, оно растет с увеличением тока нагрузки.
Рис.4.15. Зависимость напряжения в ЦП от тока нагрузки при встречном регулировании (I', Uцп', I'', Uцп'' – ток нагрузки и напряжение в ЦП в min и max режимах).
Для реализации такого закона в регуляторе должен быть смоделирован участок электрической сети от ЦП до фиктивной точки. Это моделирование осуществляется с помощью специального сопротивления токовой компенсации, через которое пропускается ток нагрузки. Величина этого сопротивления служит вторым (после Uзад) параметром встречного закона и приближенно определяется по формуле

|
|
|
U'' |
U' |
|
R |
|
tg |
ЦП |
ЦП |
. |
К |
|
|
|||
|
|
I'' I' |
|||
|
|
|
|||
Для реализации встречного закона измеряются и подаются на вход регулятора напряжение U ( с трансформатора ТН) и ток нагрузки I (с трансформатора ТТ). В результате напряжение на шинах ЦП в максимальном режиме (днем) будет выше, чем в минимальном (ночью) (см. рис. 2 и 3).
Рис.4.16. Автоматическое регулирование напряжения в ЦП по встречному закону.
Примерный график отклонений напряжения в эл. сети при встречном регулировании напряжения в ЦП приведѐн на рис.3. Фиктивная точка в данном примере выбрана на шинах РП 6-10 кВ.
4.9. Допустимая (располагаемая) потеря напряжения
Допустимое отклонение напряжение на зажимах ЭП V 5% нельзя путать с допустимой потерей напряжения в электропередаче.
Допустимая (располагаемая ) потеря напряжения определяется из условий максимального режима:
U |
доп |
V |
VH |
; |
|
|
|
ш0,4 |
доп.уд.ЭП |
|
|
где V |
- действительное отклонение напряжения на шинах в максимальном ре- |
||||
|
ш0,4 |
|
|
|
|
жиме.
VдопH .уд.ЭП - нижняя граница допустимого отклонения напряжения на зажимах уда-
ленных ЭП по ГОСТ.

4.10. Продольно-емкостная компенсация.
Кроме компенсации реактивной мощности, которую иногда называют «поперечной компенсацией», в электрических сетях применяют также компенсацию реактивного сопротивления ЛЭП с помощью последовательного включения конденсаторов, которую чаще называют «продольной компенсацией».
Продольно-емкостная компенсация (ПЕК) применяется в дальних электропередачах для увеличения пропускной способности ЛЭП и в распределительных сетях среднего и низкого напряжения для снижения потерь напряжения.
а). Использование ПЕК для увеличения пропускной способности ЛЭП. Известно, что в ЛЭП 110 кВ и выше преобладающим является реактивное со-
противление. Векторная диаграмма напряжений такой ЛЭП изображена на рис.1.
Рис.1. Векторная диаграмма ЛЭП с Х >> R.
На векторной диаграмме отрезок: ab = U1SinӨ = √3 I X Cos φ. Умножим последнее равенство слева и справа на U2 и получим
U2 U1 SinӨ = √3 X I U2 Cos φ или U2 U1 SinӨ = P X, откуда
P U1 U2 Sin
X
Максимальная пропускная способность: P U1 U2 имеет место при мини-
X
мальном Х.
б). Использование ПЕК для снижения потери напряжения в ЛЭП.
Напряжение у потребителя зависит от величины потерь напряжения в сети, которая, в свою очередь, зависит от сопротивления сети. Например, фазная потеря напряжения (продольная составляющая падения напряжения) в линии (рис.2):
U12 = I (R Cos 2 X Sin 2 ), |
(2) |
где: I – ток линии; r, х – ее активное и реактивное сопротивления.
В низковольтных распределительных сетях часто активное сопротивление больше реактивного: r > х. Поэтому там в U12 основную роль играет первое сла-
гаемое: I*r*Cos φ2.
Рис.2. Схема электропередачи.

В питающих сетях, наоборот, х > г, поэтому U12 в значительной степени определяется реактивной мощностью (РМ) и реактивным сопротивлением линий, которое мало зависит от сечения. Снижение потерь напряжения достигается:
а) изменением передаваемой по сети РМ (поперечная компенсация), б) изменением реактивного сопротивления сети - продольно-емкостная ком-
пенсация [2 - 4].
Потеря напряжения в линии определяется выражением (2). Предположим,
что она велика и напряжение в конце линии ниже допустимого: |
U2 = U1 – |
|
ΔU12 < U2доп |
(3) |
|
Чтобы снизить реактивное сопротивление линии и повысить напряжение U2 до допустимого U2доп, необходимо включить в нее последовательно конденсаторную батарею (УПК - установку продольной компенсации, рис.3).
Тогда выражение (3) перепишется: |
|
U2доп = U1 I (R Cos (X XК ) Sin ), |
(4) |
где Xк — сопротивление УПК.
Векторная диаграмма фазных напряжений до и после компенсации представлена на рис. 4.
Рис. 3. Электропередача с УПК.
Рис. 4. Векторные диаграммы.
Из векторной диаграммы (для одной фазы ЛЭП) следует:
U2 = U1 – I∙(R + jX ) – без УПК,
U21= U1 – I∙(R + jX) - I∙(- jXк) – после включения УПК, где I – ток в линии.
Величину -I∙Xк можно рассматривать как отрицательное падение напряжения или как дополнительную ЭДС, вводимую в цепь.
Методы расчета ХК.
Метод 1. При известных U1 и U2доп можно определить допустимую потерю напряжения Uдоп и необходимое для этого сопротивление УПК XК:
Uдоп = U1 - U2доп, |
|
||
ΔUдоп= I ∙ (R ∙ cosφ2 + ( X - Xк ) ∙ sinφ2), |
(5) |
||
I·Xк ·Sinφ2 = I·X ·Sinφ2 + I ∙ R ∙ cosφ2 – ΔUдоп, |
|
||
Xк ·Sinφ2 = X ·Sinφ2 –( ΔUдоп / I – R ∙ cosφ2), |
|
||
откуда: Xк X |
Uдоп / I R cos 2 |
; |
(6) |
|
|||
|
sin 2 |
|
|
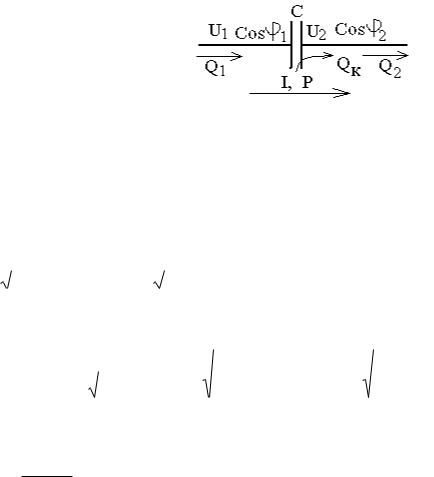
Метод 2. Также расчет мощности QК и сопротивления УПК Хк можно сделать, зная напряжения по обе стороны УПК: на входе - U1 и на выходе - U2 , Cosφ2, Sinφ2 и активную мощность Р, проходящую через УПК (рис.5).
Рис. 5. Параметры на входе и выходе УПК.
Параметры на входе УПК: P, I, U1, Q1, Cosφ1.
Параметры на выходе УПК: P, I, U2, Q2, Cosφ2 (активная мощность и ток, проходя через УПК, остаются неизменными).
Реактивная мощность на выходе: Q2 = Q1 + QК=P * tg φ1 + QК,
откуда мощность УПК: QК = Q2 - P * tg φ1 = P * (tg φ2 - tg φ1). (7)
Неизменная активная мощность:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
P = 3 U1 * I * Cosφ1 = |
|
3 U2 * I * Cosφ2, откуда: |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Cos |
|
|
U 2 |
|
Cos |
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
1 |
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 ( |
U2 |
Cos |
2 |
)2 |
|
|
|
( |
U1 |
)2 Cos2 |
2 |
|
|
|||||
|
|
Sin |
|
|
1 Cos2 |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
U |
|
|
|
|
|
U |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||||||||||
tg |
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
; |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1 |
|
Cos |
|
|
|
|
Cos |
|
|
|
|
|
|
|
U2 |
|
|
|
|
|
|
|
|
|
Cos |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Cos 2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
tg 2 Sin 2 . Выражения для tg φ1 и tg φ2 подставим в (7):
Cos 2

|
|
|
|
|
|
|
|
QК |
Р |
(Sin 2 |
( |
U1 |
)2 Cos2 2 , где |
(8) |
|
Соs 2 |
|
||||||
|
|
|
U2 |
|
|||
U1 – напряжение на входе УПК,
U2 – желаемое напряжение на выходе УПК.
Мощность конденсатора в одной фазе: QК = I2 * ХК , вар, Сопротивление конденсатора: ХК = QК / I2, Ом, Емкость конденсатора: С = 1 / ωХС , Фарад. Напряжение на зажимах батареи: U = I XК, В.
Максимальное повышение напряжения на зажимах конденсаторов УПК, которое может привести к пробою их изоляции, происходит при КЗ на ЛЭП.
На практике применяют лишь частичную компенсацию реактивного сопротивления линии. Полная или избыточная компенсацияв распределительных сетях, непосредственно питающих нагрузку, обычно не применяется, так как это связано с возможностью появления в сети перенапряжений.
Применение УПК позволяет улучшить режимы напряжения в сетях. Однако следует учитывать, что эффект повышения напряжения, зависит не только от величины, но и от фазы тока, проходящего через УПК.
Например, при чисто активной нагрузке (Cosφ2=1, Sinφ2=0) формула (2) пе-
репишется: U12 |
= I (r 1 x 0), то есть снижение потери напряжения с по- |
мощью компенсации индуктивного сопротивления становится невозможным. Наиболее эффективно применение УПК для снижения потерь напряжения в
перегруженных радиальных линиях с большим Х (воздушные ЛЭП) и низким Cosφ. Пример схемы включения батареи ПЕК 6 – 10 кВ приведен на рис.6:
QS1 – QS3 – разъединители или выключатели нагрузки; С – конденсаторы ПЕК;
F – разрядник для защиты изоляции конденсаторов от опасного повышения напряжения при протекании тока КЗ;
R – ограничительное сопротивление;
Рис.6. Схема УПК.
ТН – трансформатор напряжения для измерения напряжения на конденсаторах и для их разряда после отключения.
По сравнению с поперечной, устройства продольной компенсации, используемые для регулирования напряжения, имеют как преимущества, так и недос-
татки:
Преимущества:
-Для достижения одинакового эффекта снижения потери напряжения требуется в несколько раз меньшая мощность КБ;
-При изменении нагрузки вырабатываемая в КБ мощность меняется мгновенно, что позволяет использовать ПЕК для снижения колебаний напряжения при питании резкопеременной нагрузки.
Недостатки:
-Увеличение тока КЗ в ЛЭП, обусловленное снижением ее сопротивления; -Опасность пробоя изоляции конденсаторов при КЗ в линии;
-Низкая эффективность ПЕК при высоком Cos φ потребителя.
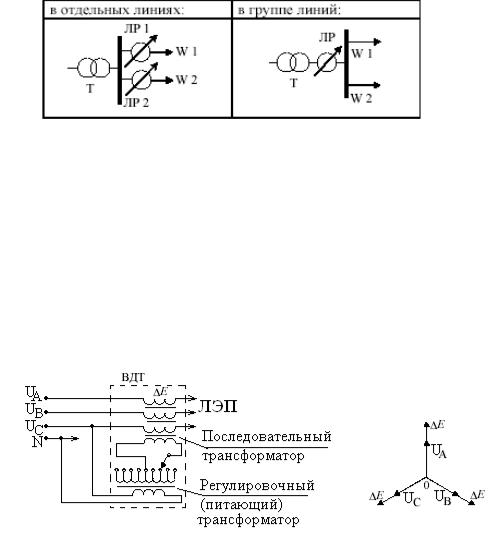
4.11. Линейные регуляторы ЛР (вольтодобавочные трансформаторы, последовательные регулировочные трансформаторы).
Предназначены для регулирования напряжения на отдельных ЛЭП или на шинах ЦП. Принцип действия ЛР основан на получении дополнительной ЭДС, складываемой с вектором напряжения сети.
Конструктивно вольтодобавочный трансформатор (ВДТ) состоит из двух трансформаторов:
-последовательный трансформатор;
-регулировочный (питающий) трансформатор.
В зависимости от способа подключения питающего трансформатора различают:
-Продольное регулирование – включение обмоток питающего трансформатора на одноимѐнные фазные напряжения; коэффициент трансформации– действительная величина.
-Поперечное регулирование – включение обмоток питающего трансформатора на линейное напряжение двух других фаз; коэффициент трансформации – комплексная величина.
-Продольно – поперечное регулирование – включение обмоток питающего трансформатора на линейное напряжение своей и соседней фазы.
Рис.7. Продольный ВДТ.
У продольного ВДТ первичная обмотка питающего трансформатора включена на фазное напряжение (например, С), в рассечку той же фазы включена и вторичная обмотка последовательного трансформатора (рис.7). Угол сдвига ЭДС
Е, наводимой во вторичной обмотке последовательного трансформатора может

принимать значения 0 или 180 градусов, в зависимости от положения (слева или справа от средней точки) переключателя отпаек питающего трансформатора. Напряжение на выходе ВДТ может быть выше (угол = 0, Е > 0) или ниже (угол = 180°, Е < 0) входного напряжения.
У поперечного ВДТ первичная обмотка питающего трансформатора включена на линейное напряжение (например, АВ, рис.8). Вторичная обмотка последовательного трансформатора включена в рассечку третьей фазы (в данном случае это фаза С).
Рис.8. Поперечный ВДТ.
Величина ЭДС Е и ее угол сдвига (90° или 270°) зависят от положения переключателя отпаек питающего трансформатора.
ВДТ характеризуются двумя номинальными мощностями:
-Проходная номинальная мощность – мощность проходящая через вторичные обмотки последовательного трансформатора: SНП = 3·UФН·IН.
-Габаритная номинальная мощность – мощность, передаваемая через питающий трансформатор к последовательному трансформатору:
SНГ = 3·ΔЕМАКС·IН. Обычно ЕМАКС = 0,15·UФН (диапазон регулирования напряжения ±15%), поэтому SНГ =0,15·SНП.
5. Компенсация реактивной мощности
5.1. Природа реактивной мощности (РМ).
РМ цепи переменного тока обусловлена обменными энергетическими процессами, происходящими в индуктивностях и емкостях цепи. Рассмотрим, например, как изменяется запас энергии магнитного поля катушки индуктивности, включенной в цепь переменного тока. Этот запас определяется мгновенным значением тока i,
протекающего через катушку, и ее индуктивностью L: W = L i2 .
2
В начальный момент времени, когда ток i=0, запас энергии W=0. Через четверть периода, когда ток достигает своего максимального значения, запас энергии также становится максимальным: W=max. Это означает, что в течение этой четверти периода поток энергии (т.е. мощность) был направлен из источника питания в катушку. В конце следующей четверти периода ток i и запас энергии W вновь обращаются в нуль. Значит поток энергии (мощность) во вторую четверть периода возвращается из катушки к источнику. Аналогичный процесс обмена определенной порцией энергии между катушкой и источником происходит в третью и в четвертую четверти периода. Таким образом за один период направление потока энергии меняется четырежды, а среднее значение реактивной мощности, которая обеспечивает этот колебательный перенос энергии, равно нулю.
Процессы обмена энергией между магнитным и электрическим полями и источником питания происходят по разному. Будучи подключенными к общей электри-
ческой цепи, катушка индуктивности и конденсатор обмениваются энергией между собой, такой обмен называется компенсацией реактивной мощности.
Строго говоря, в описанном выше процессе обмена нет источника и потребителя, но по аналогии с активной мощностью все же принято катушки индуктивности считать потребителями РМ, а конденсаторы и перевозбужденные синхронные машины - ее источниками.
Если "источник" и "потребитель" РМ расположены далеко друг от друга, то РМ, проходя по проводникам и трансформаторам электрической сети, нагревает их, т.е. вызывает потери активной мощности и энергии, приводит к отклонениям напряжения, может потребовать увеличения сечения проводников. Все это экономически невыгодно, поэтому компенсирующие устройства стараются расположить поблизости от "потребителей" РМ.
5.2. Реактивная мощность и потери активной мощности.
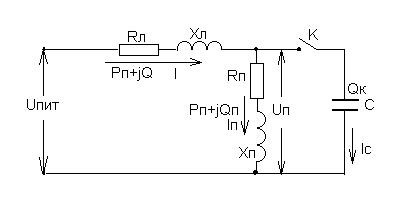
Рассмотрим зависимость потерь активной мощности в линии электропередачи (ЛЭП), имеющей параметры Rл, Xл (рис.5.1) от мощности, передаваемой по ЛЭП Рп + jQ, которая в свою очередь зависит от мощности конденсатора Qк. Потребитель, имеющий комплексное сопротивление Z =Rп + jXп и конденсатор C, являющейся компенсирующим устройством, подключены в конце ЛЭП.
Рис.5.1. Схема электропередачи.
Потери активной мощности в ЛЭП: |
|
|
|
|
|
|
|
|
|||||||||
ΔP = I2 Rл = |
S2 Rл |
= |
Rл |
P2 |
+ Q2 = |
Rл |
P |
|
+ Q |
|
Q |
|
2 |
, (5.1) |
|||
|
|
|
2 |
П |
К |
||||||||||||
2 |
|
|
2 П |
|
|
2 |
|
П |
|
|
|
|
|||||
|
U |
|
U |
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где Рп, Qп - активная и реактивная мощности потребителя; U - среднее напряжение цепи;
Qк - мощность конденсаторной батареи (КБ).
Анализ выражения (5.1) показывает, что минимальные потери активной мощ-
|
R |
P2 |
|
|
ности в ЛЭП, равные |
|
Л П |
, будут иметь место при Qк = Qп, т.е. если подключе- |
|
U2 |
||||
|
|
|||
на КБ, мощность которой равна реактивной мощности нагрузки. Если батарею отключить, то потери возрастут до значения
ΔP = |
Rл |
P2 |
+ Q |
|
|
. . |
|
|
|
2 |
|||||
|
U |
2 П |
|
П |
|
||
|
|
|
|
|
|
|
|
Интересно отметить, что такого же значения потери достигнут, если подключить батарею с мощностью в два раза большей мощности потребителя (режим перекомпенсации):