

02 АЗЭ Лекционный материал / лекция 9
.pdfОбратим внимание, что пределы (9.16) должен существовать в каждом узле «р» сети. Численная реализация определение сходимости требует оцен-
ки и сравнения значений узловых напряжений токов и мощностей на теку-
щих итерациях. При этом возможно улучшение или ухудшение качества ре-
шений, что определяет сходящийся или расходящийся процесс. Кроме того, и
для того и для другого случая характерно апериодический или колебатель-
ный характер процесса.
В практике применение итерационных методов принято считать оценку качества решений по изменению узловых напряжений косвенной а по узло-
вым небалансам токов и мощностей прямой они соответственно определяют необходимые и достаточные условия сходимости. В необходимых условиях на каждом шаге, в каждом узле производиться оценка величины приращения узлового напряжения.
По абсолютной величине:
(U1ip U1(pi 1) )2 (U 2ip U 2(pi 1) |
εΔU |
(9.17) |
||
(U ip U ip 1) εΔU |
|
|
(9.18) |
|
( ip |
i 1) |
ε |
|
(9.19) |
|
p |
Δδ |
|
|
р = 1,2,3,…n U= 1,2,3,….
Здесь величина ε с соответствующими индексами, заданными до начала расчета погрешности по приращению напряжений в узлах по модулю и фазе.
Оценка в форме (9.17) не удобна из-за большого количества операций, по-
этому в место неё часто используется:
U1ip |
|
|
|
U1ip 1 |
|
εΔU |
(9.20) |
|
|
|
|||||
|
|
|
|
|
|
|
|

 U2ip U2ip 1
U2ip U2ip 1 
 εΔU
εΔU
р = 1,2,3,…n

U= 1,2,3,….
Недостаток оценок (9.17)-(9.19) состоит в том, что они проводятся после вычисленных новых значений узлового напряжения в каждом узле при этом рассматриваемое условие сходимости считается выполненным если оценки
(9.17)-(9.20) дали положительные ответы во всех узлах. Если хотя бы в одном узле ответ отрицательный то, следовательно, отрицательна и вся оценка, по-
этому более эффективная как показала практика расчетов является не анали-
тическая оценка.
n |
|
|
|
|
|
( |
U1 ip |
|
U2 ip |
) ε U Σ |
(9.21) |
p 1 |
|
|
|
|
|
где
U1i |
|
U1i |
|
|
|
U1i 1 |
|
|
|||||
p |
|
p |
|
|
|
p |
|
|
|
|
|
|
|
U2 i |
|
U2 i |
|
|
|
U2 i 1 |
|
|
|||||
p |
|
p |
|
|
|
p |
|
|
|
|
|
|
|
Для этой наиболее эффективной оценки производится последовательный набор суммы модулей приращений вещественных и мнимых составляющих узловых напряжений и сравнение этой суммы с общей погрешностью εΔUΣ
имеющая формальный смысл.
Выполнение необходимых условий сходимости в виде (9.17)-(9.20) гаран-
тирует только малую величину приращения. Для окончательного ответа о ка-
честве решения необходима проверка достаточных условий.
Для этого квадратичные неотрицательные суммы составляющих узловых небалансов по току и мощности определяется в виде численных значений функционалов:
|
(и) |
n |
|
|
I ( U ) |
( I1p2 |
I2 p2 ) ε φI |
(9.22) |
|
|
p 1 |
|
|
|
(и) |
n |
|
|
|
φ S (U |
) ( Pp2 |
Qp2 ) ε φΔЅ |
(9.23) |
|
p 1

Оценки качества условия (9.22) и (9.23) является абсолютными и оконча-
тельными. По существу они оценивают длину векторов узловых небалансов по току и мощности в 2n мерном пространстве координатами которого явля-
ется составляющие вектора узловых и в виде U1,U2 или U и δ.
Более удобнее эти координаты и вектора узловых небалансов записыва-
ются в 2n мерной форме в виде
U1 |
I1 |
|
|
X |
|
WI |
(9.24) |
U2 |
I2 |
|
|
|
|
|
W S |
|
P |
|
X |
|
|
|
|
(9.25) |
|
U |
|
|
|
Q |
|
|
|
|
2n |
|
|
|
|
в этом случае φI = φ (Ui ) w I2 |
|
|
|
|||
|
|
k 1 |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
i 2n |
|
|
|
|
|
φΔS = |
(U ) ws2 |
|
(9.26) |
|
|
|
|
k 1 |
k |
|
|
|
|
|
|
|
|
|
Выбор оптимального шага при решении уравнений установившегося ре-
жима электрической сети.
При анализе установившихся режимов электрических сетей с помощью метода наискорейшего спуска рассматривается функционал токов небаланса
n |
n |
I1i2 |
I 2i2 , где I1 и I2 – соответственно действительные и мнимые |
i 1 |
i 1 |
составляющие значений узловых токов небаланса; n – число независимых уз-
лов схемы.
Решение системы нелинейных уравнений X U2U1 – вектор размерностью
2n, где U1 и U2 – соответственно векторы действительных и мнимых частей значений узловых напряжений, отыскивается как координаты точки экстре-
мума функционала φ в пространстве размерностью 2n: X 0 .
Для этого на каждом шаге итерационного процесса, зная некоторые зна-
чения вектора X, находят новые значения составляющих этого вектора, отве-
чающие меньшему, чем исходные значению функционала φ, по следующему выражению:
|
|
Xi 1 |
Xi t gradX , |
(9.27) |
где grad |
X |
|
– вектор-градиент токов небаланса, получаемый диффе- |
|
|
X |
|
|
|
|
|
|
|
|
ренцированием функционала φ по всем составляющим вектора X; t – шаг в направлении вектора-антиградиента, который соответствует направлению обобщенной касательной к поверхности функционала φ в точке Xi простран-
ства размерностью 2n; i 1 – номер итерации.
При реализации алгоритма расчета установившегося режима методом наискорейшего спуска возникают две задачи:
1)определение вектора-градиента X ,
2)определение оптимальной величины шага t. Остановимся подробнее на вопросе выбора шага t. Обозначим пробный шаг tп .
Имея некоторые начальные значения неизвестных X0 , по выражению (1)
при можно получить новые значения неизвестных X1 . Будем считать наилучшим значением шага t , соответствующее минимуму φ по направле-
нию антиградиента:
|
|
0 . |
|
||
t |
|
|
|
t t |
|
|
|
|
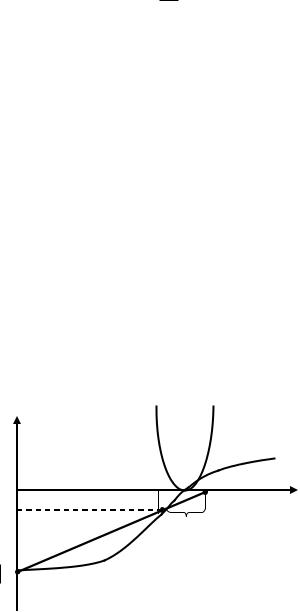
Значение уточняющего шага tу , удовлетворяющее этому условию, можно вычислить приближенно, приняв допущение о линейной зависимости произ-
водной функционала φ по направлению антиградиента от величины шага t
(рис. 9.2.). |
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(t) |
|
||
|
|
|
t |
|
|
|
|
|
|
tп |
t* |
|
t |
||
|
|||||||
|
|
t t |
|
||||
|
|
|
|
|
|||
t |
|
0n |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
||
tу
t t 0
(рис.9.2.).Зависимость производной функционала φ по направлению антиградиента
от величины шага t

Из подобия двух треугольников найдем уточняющий шаг
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
tу tп |
|
|
|
|
|
|
|
, |
(9.28) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
t |
|
|
|
t |
|
|
|
|
t |
|
|
|
|
|
|||
|
|
|
|
|
|
|
t tп |
|
|
t 0 |
|
|
|
|
t tп |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где |
|
|
и |
|
– производные функционала φ по направлению антигра- |
||||||||||||||||||
t |
|
t 0 |
t |
|
t tп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
диента соответственно в начальной точке t 0 |
и при t tп . |
|
|||||||||||||||||||||
Представим производную в виде |
|
|
|
|
Х |
. Дифференцируя основное |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
t |
|
Х |
|
|
t |
|
|
|
|
|
||||
итерационное выражение по t, получим: |
Х |
|
|
|
|
|
. |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
Х |
|
t 0 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Тогда выражения для производных в формуле (9.28) можно записать сле-
дующим образом:
|
|
|
|
|
|
|
|
|
Х |
|
|
|
|
|
|
|
2 |
; |
|
|
(9.29) |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
t |
|
|
Х |
|
|
|
|
|
t |
|
|
Х |
|
|
|
|
|
|
|
|
|
|
|
t 0 |
|
t 0 |
|
|
|
|
|
|
t 0 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
Х |
|
|
|
т |
|
|
|
|
(9.30) |
|||||
|
|
|
|
|
|
|||||||||||||||||
t |
|
|
t tп |
Х |
|
t tп |
t |
|
|
Х |
|
t tп |
|
Х |
|
t 0 |
|
|||||
|
|
|
|
|
|
|
|
|
||||||||||||||
Каждое из полученных выражений представляет собой скалярное произ-
ведение двух векторов-градиентов с обратным знаком. Индекс “т” означает транспонирование первого из векторов-градиентов.
С учетом (9.29) и (9.30) выражение для нахождения уточняющего шага
(9.29) запишется следующим образом:
|
|
После |
||
ных X2 , |
||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
X |
|
|
|
|
|
t tп |
|
|
|
|||
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
т |
|
|
|
|
t t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
y |
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Х |
|
t tп |
|
Х |
|
t 0 |
|
Х |
|
t 0 |
|
|
|
Х |
|
t tп |
|
Х |
|
t 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
вычисления шага ty можно определить новые значения неизвестпринимая в качестве направляющего вектор-антиградиент
, по следующему выражению:
Х2 Х1 t у |
|
|
|
. |
|
||||
X |
|
|
||
|
|
t tп |
|
|
|
|
|
Таким образом, каждая итерация метода наискорейшего спуска состоит из двух частей – итерация с пробным шагом и итерация с уточняющим шагом