

5.2. Особенности расчёта лопастного электропривода.
1.) Определение основных размеров лопастной машины.
Рассмотрим чертёж лопастной машины и введём необходимые обозначения.
![]() -
диаметр баллера (рассчитывается по
формулам Регистра или принимается по
диаметру баллера двух нулевых или
плунжерных приводов.)
-
диаметр баллера (рассчитывается по
формулам Регистра или принимается по
диаметру баллера двух нулевых или
плунжерных приводов.)
![]() =(1,8-2,0)
=(1,8-2,0)
![]() -
диаметр ступицы.
-
диаметр ступицы.
![]() -
диаметр цилиндра, м;
-
диаметр цилиндра, м;
Н - высота лопасти, м;
Z=(2-4)- число лопастей.
При перекладке
руля и установившимся движении можно
считать, что момент сопротивления (![]() )
и вращающий момент
)
и вращающий момент![]() ,
возникающий за счёт разности давлений
в полостях
,
возникающий за счёт разности давлений
в полостях![]() '
и BB' связаны отношением:
'
и BB' связаны отношением:
![]() (1)
(1)
где ηЛ.МЕХ
- механическое КПД лопастного привода:
среднее значение
![]() =
0,95-0,965. Значение вращающего момента
пропорционально площади лопасти,
индикаторному давлению, числу лопастей
и плечу действия равнодействующих сил
на лопасти.
=
0,95-0,965. Значение вращающего момента
пропорционально площади лопасти,
индикаторному давлению, числу лопастей
и плечу действия равнодействующих сил
на лопасти.
МВР = S·(p-pс)·z· r (2)
где S- площадь
лопасти, м![]() :
рассчитывается по уравнению
:
рассчитывается по уравнению![]()
![]() -
индикаторное давление, Па: из за трудности
уплотнения полостей всасывания и
нагнетания рабочее давление p = (4-5)10
-
индикаторное давление, Па: из за трудности
уплотнения полостей всасывания и
нагнетания рабочее давление p = (4-5)10![]() Па;
Па;
![]() -
противодавление с учётом потерь в
трубопроводе и арматуре;
-
противодавление с учётом потерь в
трубопроводе и арматуре;
r- плечо приложения равнодействующей силы, м
![]()
Подставляя значения величин в уравнение (1) получим уравнение:
![]() (3)
(3)
Решая уравнение
(3) относительно диаметра цилиндра при
максимальном значении момента на
баллере, наибольшем значении рабочего
давления в цилиндре, среднем значении
механического КПД лопастного привода
получим уравнение с двумя неизвестными-DЦ
и Н .![]()
Если нет ограничений
габаритных, связанных с размещением
лопастного привода в румпельном
помещении, то задаются несколькими
значениями Н, рассчитывают диаметры
цилиндра и строят зависимость
![]() .
Из графика выбирают значенияDЦ
и Н, при
которых для обеспечения максимального
значения КПД лопастного привода
выполняется отношение:
.
Из графика выбирают значенияDЦ
и Н, при
которых для обеспечения максимального
значения КПД лопастного привода
выполняется отношение:
![]()
Из конструктивных
соображений уточняют значение
![]() и Н, рассчитывают и строят зависимость
давления от угла перекладки руля p =
f(α), по уравнениям.
и Н, рассчитывают и строят зависимость
давления от угла перекладки руля p =
f(α), по уравнениям.

![]()
![]()
Особенность расчёта кривой давления в том, что КПД лопастного привода является функцией давления, поэтому сначала рассчитывают давление без учёта КПД, а затем уточняют значение давления подстановкой КПД соответствующего ожидаемому давлению.
При расчёте
необходимой подачи насоса ротечки
рабочей жидкости в лопастном гидропрессе
учитывают средним значение его объёмного
КПД
![]()

При расчёте и построении нагрузочной диаграммы лопастного привода и нагрузочной диаграммы электродвигателя в уравнении равновесии расхода рабочей жидкости необходимо учитывать объемный КПД лопастного привода.

Где
![]() -
средний объёмный КПД лопастного привода
на рассматриваемом участке.
-
средний объёмный КПД лопастного привода
на рассматриваемом участке.
6. Управление рулевыми приводами
Управляемость является одним из важнейших качеств современного судна. Она может быть обеспечена различными способами и средствами: кормовыми рулями, гребными винтами, водометными движителями, подруливающими устройствами, крыльчатыми движителями. Нередки случаи совместного использования некоторых из названных устройств. На современных транспортных судах основным средством обеспечения активного маневрирования объекта являются кормовые рули, перекладка которых осуществляется посредством электропривода. Электроприводом производится перекладка руля, его остановка, реверсирование, регулирование скорости и т.д. В состав рулевого электропривода входит исполнительный электродвигатель ИД, передаточный механизм (рулевая машина) РМ, система управления рулем, система контроля.
Рассмотрим общую структуру управления судном, где выходными звеньями являются руль Р и судно С.
А) Б)
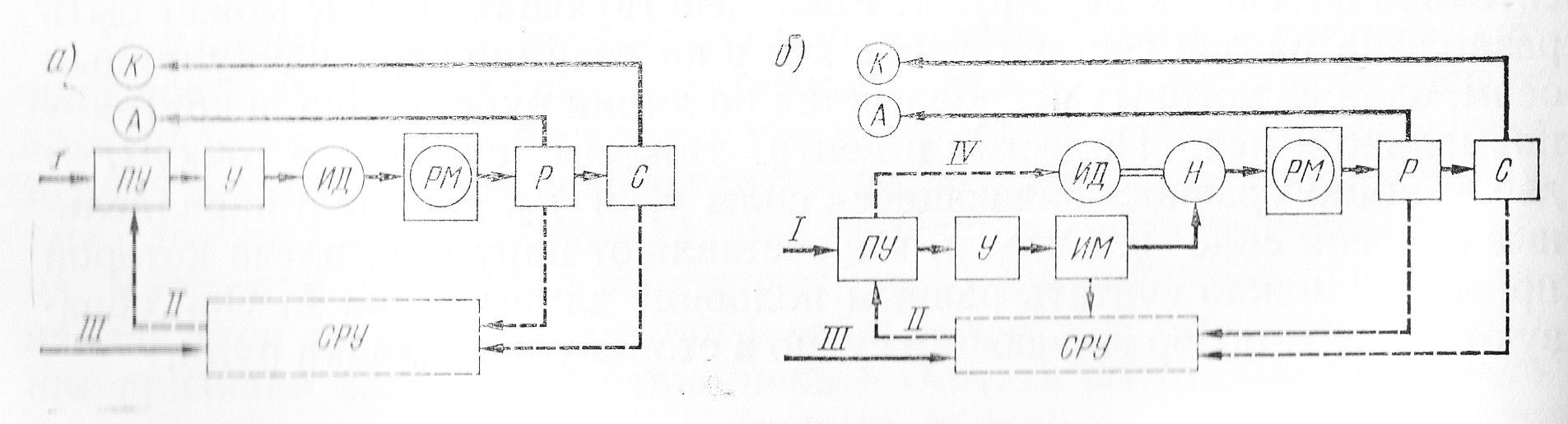
Структурная схема управления судном
а – с использованием РЭМ – привода; б – с использованием РЭГ – привода
1 – ручное управление; 2 – автоматическое управление;
3 – управляющая программа; 4 – изготовка.
Система управления включает в себя следующие элементы: ПУ – пост управления (командное устройство). Основной пост устанавливается в рулевой рубке. Он имеет переключатели для перехода на предусмотренные виды ручного или автоматического управления рулем и элементы контроля исправного состояния наиболее ответственных звеньев привода; У – усилитель, может быть релейный, полупроводниковый, электромашинный, магнитный, гидравлический, комбинированный; СРК – счетно-решающий навигационный комплекс, вырабатывающий алгоритм управления, автоматически контролирующий выполнение маневров в соответствии с заданной навигационной программой. Наиболее часто используются системы стабилизации судна на прямом курсе, где СРК вырождается в систему автоматического регулирования по отклонению курсового угла. Все элементы такой системы комплектуются в колонке основного поста управления.
Структура РЭМ – привода показывает, что перекладка руля производится непосредственно ИД, который работает в повторно – кратковременном или прерывистом режиме с частыми пусками, реверсами и торможениями. Регулирование скорости перекладки руля производится посредством изменения частоты вращения ИД.
Общая структура РЭГ – привода показывает, что ИД вращает насос Н с постоянной частотой вращения. Управление рулем производится посредством сервомеханизма ИМ, изменяющего направление и подачу масла на гидравлическую рулевую машину РМ.
Система контроля служит для проверки исполнения задания (действия) по перекладке руля и результатов его воздействия на судно. В систему контроля входит рулевой указатель – аксиометр А, позволяющий определить положение руля относительно диаметральной плоскости, и репитер гирокомпаса К, показывающий курс судна и его изменение. В современных рулевых приводах приборы контроля встраиваются в пульт управления.