

12; Величина (табл. 3)

Площадь кольцевого зазора между регулирующим кольцом и веретеном (табл. 3)

Площадь переменного сечения веретена (табл. 3)
![]()
Диаметр веретена (табл. 3)
![]()
При
.
![]()
Таблица 3

Проверка веретена на устойчивость. Критическая сила

где

Наибольшая сила тормоза наката
![]()
Запас устойчивости
![]()
Б. Расчет тормоза наката
Путь наката в момент выбора вакуума

Предельное значение равнодействующей!
в момент выбора вакуума

в конце наката

Характеристика тормоза отката
![]()
где
![]()
Характеристика тормоза наката

Первый период Б. Путь наката к концу первого периода
![]()
где![]()
6.
Равнодействующая при![]()
![]()
Квадрат скорости наката: ■— при

![]()
к концу первого периода
![]()
Сила тормоза наката:
в
конце периода![]()
где

при

![]()
Площадь канавок штока: '— в конце
периода

при

 »
»
Продолжительность первого периода
![]()
Второй
период П.
Сила тормоза наката при![]()
![]()
!2. Площадь канавок штока:
при![]()
![]()
при


Продолжительность второго периода
![]()
Третий период
Путь наката к концу третьего периода

где
![]()
Равнодействующая при

![]()
Квадратскорости наката:
при![]()

в
конце периода![]() 17. Сила
тормоза наката:
17. Сила
тормоза наката:
при![]()
![]()
где

в конце периода

где

Площадь канавок штока:
при


в конце периода

Продолжительность третьего периода

где
![]()
Четвертый период
Путь наката к концу четвертого периода
![]()
Сила тормоза наката:
При
![]()
При
![]()
В конце периода
![]()
Где

Площадь канавок штока:
при

![]()
при


в конце периода
![]()
Продолжительность четвертого периода
![]()
Пятый период
Равнодействующая при

 *
*Квадрат скорости отката при

![]()
Сила тормоза наката при


где
![]()
Площадь канавок штока

Продолжительность пятого периода
![]()
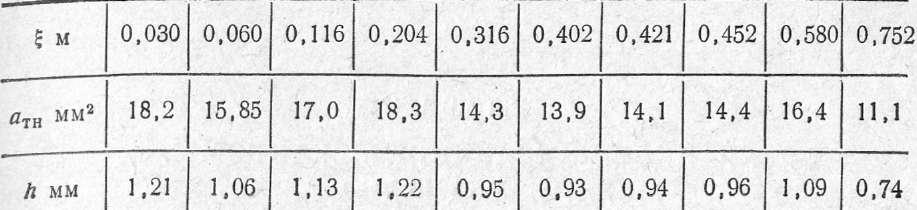
Глубина канавок штока (табл. 4)

30. Время наката
![]()
Таблица 4
Глава 14
УРАВНОВЕШИВАЮЩИЕ МЕХАНИЗМЫ.
МЕХАНИЗМЫ НАВЕДЕНИЯ
§ 14.1. Уравновешивающие механизмы
Одним из путей повышения устойчивости орудий при стрельбе является уменьшение высоты их линии огня. В этих орудиях для обеспечения удобства заряжания ствола при больших углах возвышения и для исключения удара его казенной части об основание

Рис. 14.1. Схема расположения центра тяжести качающейся части орудия относительно оси цапф
(грунт)
при откате качающаяся часть вынесена
вперед относительно оси цапф. При
такой конструкции качающейся части ее
сила тяжести![]() приложенная
в центре тяжести
G
(рис.
14.1). создает
относительно оси цапф — точки О —
момент, который затрудняет или делает
невозможной работу подъемного
механизма при
наведении ствола.
приложенная
в центре тяжести
G
(рис.
14.1). создает
относительно оси цапф — точки О —
момент, который затрудняет или делает
невозможной работу подъемного
механизма при
наведении ствола.
Момент
силы тяжести качающейся части
.![]() относительно
оси цапф равен произведению силы
тяжести
относительно
оси цапф равен произведению силы
тяжести![]() на
плечо
на
плечо![]() где
где![]() —расстояние
между осью цапф (точка О) и центромтяжести
качающейся части (точка
G),
—расстояние
между осью цапф (точка О) и центромтяжести
качающейся части (точка
G),![]() —угол
между отрезком
—угол
между отрезком![]() й
горизонтом.
Тогда
й
горизонтом.
Тогда
![]()
Следовательно,
величина момента![]() изменяется
в зависимости
от угла
изменяется
в зависимости
от угла![]() позакону
косинусоиды, т. е. наибольшее значение
позакону
косинусоиды, т. е. наибольшее значение![]() будет при
будет при![]() ,
а наименьшее —при
,
а наименьшее —при![]()
В
орудиях, у которых центр тяжести
качающейся части не находится на оси
канала ствола, угол![]() отличается
по величине от угла возвышения ствола
отличается
по величине от угла возвышения ствола![]() Между
этими углами существует следующая
зависимость:
Между
этими углами существует следующая
зависимость:
![]()
где![]() —
угол в вертикальной плоскости между
линией, соединяющей центр тяжести
качающейся части с осью цапф, и линией,
проходящей через ось цапф (точка О)
параллельно оси канала ствола; знак
«плюс» относится к случаю, когда
центр тяжести располагается выше оси
цапф, а знак «минус» — когда ниже оси
цапф.
—
угол в вертикальной плоскости между
линией, соединяющей центр тяжести
качающейся части с осью цапф, и линией,
проходящей через ось цапф (точка О)
параллельно оси канала ствола; знак
«плюс» относится к случаю, когда
центр тяжести располагается выше оси
цапф, а знак «минус» — когда ниже оси
цапф.
Угол![]() находится
по формуле
находится
по формуле
![]()
где![]() —координаты
центра тяжести качающейся части
—координаты
центра тяжести качающейся части
(точка
G)
относительно оси цапф при![]() (рис. 14.2).
(рис. 14.2).
В
орудиях для облегчения работы подъемного
механизма действие момента![]() компенсируют
или утяжелением казенной части ствола
(противовесом), приводящим центр тяжести
качающейся части на линию оси цапф, или
применением специального устройства,
называемого уравновешивающим механизмом,
который создает относительно оси
цапф момент
компенсируют
или утяжелением казенной части ствола
(противовесом), приводящим центр тяжести
качающейся части на линию оси цапф, или
применением специального устройства,
называемого уравновешивающим механизмом,
который создает относительно оси
цапф момент![]() .
направления, противоположного
.
направления, противоположного![]() (рис.
14.3), т. е. уравновешивает качающуюся
часть относительно оси цапф. Следовательно,
уравновешивающий механизм предназначен
для уравновешивания качающейся части
относительно оси цапф, чем облегчается
работа подъемного механизма. В
зависимости от величины момента
(рис.
14.3), т. е. уравновешивает качающуюся
часть относительно оси цапф. Следовательно,
уравновешивающий механизм предназначен
для уравновешивания качающейся части
относительно оси цапф, чем облегчается
работа подъемного механизма. В
зависимости от величины момента![]() и
характера его изменения при придании
качающейся части углов возвышения
различают схемы полного, частичного и
неполного уравновешивания качающейся
части.
и
характера его изменения при придании
качающейся части углов возвышения
различают схемы полного, частичного и
неполного уравновешивания качающейся
части.
Схема
полного уравновешивания — это когда
при всех углах возвышения ствола,
допускаемыхконструкцией орудия, момент
силы тяжести качающейся, части![]() равен
по абсолютной величине моменту
уравновешивающего механизма (рис.
14.4,а), т.е.
равен
по абсолютной величине моменту
уравновешивающего механизма (рис.
14.4,а), т.е.
![]()
Схема
частичного уравновешивания — это когда
при всех углах возвышения ствола,
допускаемых конструкцией орудия, момент
силы тяжести![]() больше
или меньше по абсолютной величине
момента уравновешивающего механизма
больше
или меньше по абсолютной величине
момента уравновешивающего механизма![]() :
:
![]()
Для
рассмотренной схемы уравновешивания
алгебраическая сумма![]()
где![]() —
момент неуравновешенности качающейся
части.
—
момент неуравновешенности качающейся
части.
Величина момента AM в основном определяет размер усилия на ведущем звене (маховике) подъемного механизма.
Схема частичного уравновешивания применяется у орудий с электрическим и гидравлическим приводами для частичного облегчения работы подъемного механизма.

Схема
с неполным уравновешиванием качающейся
части — это когда при одном или нескольких
значениях угла возвышения ствола момент
силы тяжести качающейся части![]() равен
по абсолютной величине моменту
уравновешивающего механизма
равен
по абсолютной величине моменту
уравновешивающего механизма![]() при других значениях угла возвышения
ствола эти моменты
по абсолютной
величине не равны (рис. 14.4,6), т.е.
при других значениях угла возвышения
ствола эти моменты
по абсолютной
величине не равны (рис. 14.4,6), т.е.
![]()
где![]() —
угол (углы) возвышения ствола, при котором
достигается равенство
абсолютных величин моментов
—
угол (углы) возвышения ствола, при котором
достигается равенство
абсолютных величин моментов![]() и
и![]()
![]()
При
такой схеме уравновешивания качающейся
части усилие на ведущем звене подъемного
механизма определяется наибольшей
величиной момента неуравновешенности![]()

Как правило, схема неполного уравновешивания применяется орудиях с ручным приводом подъемного механизма. При этом, когда усилие на маховике подъемного механизма выходит за пре-
делы
установленных величин, его значение
изменяют за счет уменьшения момента![]()
Уравновешивающие механизмы классифицируются по следующим основным признакам:
по месту приложения силы уравновешивающего механизма к качающейся части;
по виду рабочего тела.
По месту приложения -силы к качающейся части уравновешивающие механизмы делятся на толкающие, тянущие и моментные.
Под уравновешивающими механизмами толка ю щ е г о типа понимаются такие, сила которых приложена к качающейся части впереди оси цапф (рис. 14.3). Эти механизмы получили наибольшее распространение. Их главным достоинством является уменьшение давления цапф люльки на цапфенные гнезда верхнего станка, а следовательно, и уменьшение сил трения при наводке. Такое воздействие уравновешивающего механизма на качающуюся часть орудия требует делать наметки и их крепления достаточно прочными.
Под уравновешивающими механизмами тянущего типа понимают такие, сила которых приложена к качающейся части сзади оси цапф (рис. 14.5, а). Применение таких механизмов позволяет удобнее размещать их на лафете. Недостатком данного типа уравновешивающего механизма является то, что своим действием он увеличивает трение в цапфах люльки.
Под уравновешивающими механизмами моментного типа понимаются такие, момент которых приложен непосредственно к оси цапф качающейся части (рис. 14.5,6). Моментные уравновешивающие механизмы разгружают наметки и их крепления, но увеличивают силу трения в гнездах цапф. Как правило, такие механизмы применяются в орудиях малого калибра.
В зависимости от вида применяемых рабочих тел уравновешивающие механизмы делятся на пружинные, торсионные и пневматические.
Достоинством пружинных уравновешивающих механизмов являются:
•— возможность лучшего уравновешивания;
—■■ малое колебание величины момента неуравновешенности при изменении углов возвышения;
практически нечувствительность силы уравновешивающего механизма к изменению температуры окружающей среды;
простота конструкции и обслуживания.
К недостаткам пружинных механизмов следует отнести:
трудность изготовления пружин с заданной жесткостью (с вполне определенными характеристиками);
осадка пружин с течением времени, что ведет к расстройству работы механизма;
большие габариты уравновешивающих механизмов для орудий среднего и крупного калибров.
К достоинствам торсионных уравновешивающих механизмов относятся:
простота обслуживания;
нечувствительность работы механизма к изменению температуры окружающей среды;

Рис. 14.5. Уравновешивающие механизмы: а — нагружающие оси цапф; б — моментные
высокая прочность на усталость по сравнению с пружинными механизмами.
К недостаткам их следует отнести сложность конструкции и трудность обеспечения уравновешивания качающейся части при изменении угла возвышения в широком интервале.
К достоинствам пневматических уравновешивающих механизмов относятся компактность, малая масса и простота регулировки.
Недостатками их являются: • большое колебание момента неуравновешенности при изменении угла возвышения ствола;
зависимость работы от температуры окружающей среды;
неоднообразность уравновешивания в зависимости от направления и скорости придания угла возвышения, от изменения величины сил трения в уплотнительных устройствах, т. е. зависимость силы, а следовательно, и момента механизма от направления и скорости движения ствола орудия при наводке.
Несмотря на существенные недостатки пневматических уравновешивающих механизмов, они получили наибольшее распространение в современных орудиях вследствие своей компактности и малой массы.
К уравновешивающим механизмам предъявляются следующие основные требования:
хорошее уравновешивание качающейся части орудия во всем диапазоне углов вертикальной наводки, т. е. усилие на маховике подъемного механизма должно быть постоянным во всем диапазоне вертикальной наводки;
однообразность уравновешивания качающейся части орудия при изменении углов вертикальной наводки как по направлению, так и по скорости;
нечувствительность силы уравновешивающего механизма к колебаниям температуры окружающей среды;
компактность (небольшие габариты) и малая масса;
длительность срока службы;
простота конструкции, обслуживания и ремонта;
усилие на маховике при работе подъемного механизма должно быть по возможности одинаковым как при незаряженном, так и при заряженном орудии.
Пружинные уравновешивающие механизмы
Пружинный
уравновешивающий механизм (рис. 14.3)
состоит из пружины 1 (одной или нескольких),
расположенной в поджатом состоянии
во внутренней полости наружного
2
и внутреннего 3 цилиндров. Наружный
цилиндр через подвижный шарнир
В
связан с качающейся частью, а внутренний
через неподвижный шарнир А — с верхним
станком. Сила пружины![]() создает
момент относительно оси цапф
создает
момент относительно оси цапф![]() обратный
по величине моменту силы тяжести
качающейся части. При этом происходит
полное или частич- ноо ее уравновешивание,
в результате чего облегчается работа
подъемного механизма.
обратный
по величине моменту силы тяжести
качающейся части. При этом происходит
полное или частич- ноо ее уравновешивание,
в результате чего облегчается работа
подъемного механизма.
Момент пружинного уравновешивающего механизма
![]()
где![]() —сила
пружины;
—сила
пружины;
h
— плечо действия силы![]() относительно
оси цапф. Известно, что сила пружины
пропорциональна стреле
сжатия (рис.
14.6), поэтому можно написать
относительно
оси цапф. Известно, что сила пружины
пропорциональна стреле
сжатия (рис.
14.6), поэтому можно написать
![]()
где
с—коэффициент жесткости
пружины,характеризующий скорость
нарастания силы пружины![]() при
увеличении стрелы сжатия;
при
увеличении стрелы сжатия;
s — стрела сжатия пружины.

Подставляя
значение силы![]() из
формулы (14.8) в выражение (14.7), получим
из
формулы (14.8) в выражение (14.7), получим
![]()
Для обеспечения полного уравновешивания качающейся части необходимо, чтобы правая часть выражения (14.9) изменялась по закону косинуса. Однако следует отметить, что возможное теоретически полное уравновешивание во всем секторе вертикальной наводки сложно осуществить в действительности из-за производственных трудностей изготовления пружин с заданными характеристиками, неизбежной с течением времени осадки пружин, наличия трения в шарнирах уравновешивающего механизма, в цапфах люльки и влияния собственной силы тяжести уравновешивающего механизма. Поэтому на практике полное уравновешивание производят только для двух или трех значений угла возвышения, а Для остальных значений в пределах сектора вертикальной наводки осуществляют частичное уравновешивание качающейся части, т. е. рименяют схему неполного уравновешивания качающейся части.
Насчет
пружинного уравновешивающего механизма
толкающего типа с полным уравновешиванием
в двух точках
![]() =0
и
=0
и
![]() )
сводят к установлению равенства момента
уравновешивающего механизма моменту
силы тяжести качающейся части для этих
точек. Эти равенства имеют следующий
вид: при
)
сводят к установлению равенства момента
уравновешивающего механизма моменту
силы тяжести качающейся части для этих
точек. Эти равенства имеют следующий
вид: при![]()
![]()
при![]()
![]()
где![]() —силы
уравновешивающего механизма при углах
—силы
уравновешивающего механизма при углах
возвышения
соответственно![]()
![]() — плечи
действия уравновешивающих сил
соответственно при
— плечи
действия уравновешивающих сил
соответственно при![]()
![]() •—число
колонок;
•—число
колонок;
![]() — угол
возвышения центра тяжести качающейся
части при
— угол
возвышения центра тяжести качающейся
части при![]()
![]() — угол
возвышения центра тяжести качающейся
части при
— угол
возвышения центра тяжести качающейся
части при![]()
Величины![]() определяются
конструкцией орудия. Из
определяются
конструкцией орудия. Из
условий (14.10) и (14.11) получаем
![]()
![]()
Для
дальнейшего расчета необходимо установить
зависимость плеч
h0
и
hm
от конструктивных размеров. Положим,
что уравновешивающий механизм
расположен на орудии так, как показано
на рис. 14.2. Так как площадь треугольника![]()
![]()
то
![]()
по аналогии
![]()
Расстояние
между шарнирами![]() ~ при
~ при![]()
определяют
по теореме косинусов из треугольников![]()

Тогда
после подстановки значений![]() и
и![]() в
зависимости (14.15) и (14.16) получим
в
зависимости (14.15) и (14.16) получим

Затем
по выражениям (14.12) и (14.13) вычисляют![]() и
и![]() и
строят диаграмму работы пружины, из
которой определяют жесткость пружины
по зависимости
и
строят диаграмму работы пружины, из
которой определяют жесткость пружины
по зависимости
![]()
и начальную стрелу сжатия пружины
![]()
После
этого вычисляют![]() для
различных углов
для
различных углов![]() и
строят
и
строят
графики![]() .
По графику определяют момент
.
По графику определяют момент
неуравновешенности![]() Величина
Величина![]() не
должна увеличи
не
должна увеличи
вать
усилие на маховике подъемного механизма
выше допустимого предела. Если это
условие не выполняется, то необходимо
изменить конструктивные размеры
механизма и по измененным значениям![]() повторить
расчет механизма.
повторить
расчет механизма.
Пневматические уравновешивающие механизмы
Пневматические уравновешивающие механизмы (рис. 14.7, а) состоят из одной или двух колонок. Колонка состоит из наружного 1 и внутреннего 2 цилиндров, которые при работе механизма перемещаются относительно друг друга под действием силы давления газа, находящегося во внутренних полостях цилиндра. Внутренний объем цилиндров герметизирован воротниковым уплотнением 3. Над воротниковым уплотнением находится жидкость 6, которая создает гидравлический запор. К наружному цилиндру на сварке крепится вентильное устройство 7, которое предназначено Для наполнения и выпуска из колонки газа и жидкости.
Давление газа р во внутренних полостях цилиндров создает силу пневматического уравновешивающего механизма:
![]()
где s ------ площадь поперечного сечения внутреннего цилиндра.
При вертикальной наводке ствола в результате относительного ремещения цилиндров изменяется объем внутренней полости колонки w, а следовательно, изменяются и параметры газа (объем,
давление, температура), находящегося в ней. Изменение параметров газа происходит по политропическому закону, т. е.

![]()
где![]() —
соответственно давления во внутренней
полости ко
—
соответственно давления во внутренней
полости ко
лонки
при углах возвышения ствола![]()
![]() —соответственно
объемы газа в колонке при углах возвышения
ствола
—соответственно
объемы газа в колонке при углах возвышения
ствола![]()
![]() —показатель
политропы.
—показатель
политропы.
Из уравнения (14.20) определяют значение р и, подставляя его в выражение (14.19), получают
![]()
Приводят
отношение![]() к
виду
к
виду![]() , затем делят числитель и знаменатель
этого отношения наs
и получают
, затем делят числитель и знаменатель
этого отношения наs
и получают
![]()
где![]() —приведенная
длина начального объема газа в ко
—приведенная
длина начального объема газа в ко
лонке
при![]() ;
;
![]() —ход
цилиндра колонки, отвечающий углу
возвышения ствола
—ход
цилиндра колонки, отвечающий углу
возвышения ствола![]()
После подстановки зависимости (14.22) в выражение (14.21) получают
![]()
В
соответствии с видом выражения (14.23)
кривая усилия механизма в зависимости
от относительного перемещения цилиндров
представляет собой политропу (рис.
14.7,6). Следовательно, момент
уравновешивающего механизма![]() при
при![]() также
будет изменяться по политропическому
закону.
также
будет изменяться по политропическому
закону.
На
практике пневматическим уравновешивающим
механизмом трудно обеспечить хорошее
уравновешивание в широком диапазоне
изменения углов возвышения из-за
различных законов изменения моментов![]()
Конструкции
большинства пневматических уравновешивающих
механизмов имеют специальные устройства,
которые позволяют поддерживать величину
момента неуравновешенности![]() в
необходимых пределах при изменении
угла возвышения ствола и регулировать
работу механизма При изменении температуры
окружающей среды. Очень часто в
пневматическом уравновешивающем
механизме роль устройства для поддержания
в
необходимых пределах при изменении
угла возвышения ствола и регулировать
работу механизма При изменении температуры
окружающей среды. Очень часто в
пневматическом уравновешивающем
механизме роль устройства для поддержания![]() в
необходимых пределах выполняет пружина
1 (рис. 14.8), установленная на стержне
2,
который в свою очередь закреплен
неподвижно в наружном цилиндре 3.
Пружина 1 помещена во внутреннем цилиндре
4.
Работа данного механизма происходит
следующим образом.
в
необходимых пределах выполняет пружина
1 (рис. 14.8), установленная на стержне
2,
который в свою очередь закреплен
неподвижно в наружном цилиндре 3.
Пружина 1 помещена во внутреннем цилиндре
4.
Работа данного механизма происходит
следующим образом.
При
перемещении вверх наружного цилиндра
на величину х пружина 1 свободно
поднимается и никакого влияния на силу
Уравновешивающего механизма и,
следовательно, на момент![]() е оказывает. При дальнейшем перемещении
наружного цилиндра стш!КИНа
^ УшШается
в торец внутреннего цилиндра и под дей-
пружМ
давления газа
начинает сжиматься. При этом вектор
силы
е оказывает. При дальнейшем перемещении
наружного цилиндра стш!КИНа
^ УшШается
в торец внутреннего цилиндра и под дей-
пружМ
давления газа
начинает сжиматься. При этом вектор
силы
![]() приложен
к стержню
2,
а следовательно, и к наруж-
приложен
к стержню
2,
а следовательно, и к наруж-
ному
цилиндру и направлен в обратную сторону
от силы давления газа![]() Таким
образом, на наружный цилиндр действуют
две
Таким
образом, на наружный цилиндр действуют
две
силы, равнодействующая которых есть сила уравновешивающего
механизма![]()

Чем
больше будет величина перемещения
цилиндра
х,
тем больше будет увеличиваться сила
пружины![]() при
одновременном уменьшении
силы
при
одновременном уменьшении
силы![]()
Поэтому
величина момента неуравновешенности
будет подпер; живаться
в
необходимых пределах во всем секторе
вертикальной наводки
(рис. 14.9). Без. этого устройства величина![]() была
бы больше допустимого значения, что
наглядно показывает
диаграм- _ ма
изменения величины
была
бы больше допустимого значения, что
наглядно показывает
диаграм- _ ма
изменения величины![]() (рис.
14.9)—пунктирная линия.
(рис.
14.9)—пунктирная линия.
Пневматический уравновешивающий механизм аналогичного действия имеют гаубица Д-30 и другие орудия.
При колебании температуры окружающей среды в пневматических уравновешивающих механизмах изменяется давление газа
в
колонке, а следовательно, и изменяются
усилие![]() и
момент
и
момент![]() Это приводит 'к увеличению момента
неуравновешенности
Это приводит 'к увеличению момента
неуравновешенности![]() в результате чего затрудняется работа
на подъемном механизме.
в результате чего затрудняется работа
на подъемном механизме.
Рис.
14.9. Диаграмма уравновешивания
пневматического уравновешивающего
механизма с пружиной

Для
поддержания момента уравновешивающего
механизма необходимой величины в
интервале суточного колебания температуры
воздуха (примерно в пределах![]() )
в конструкции механизма предусматривается
специальное регулировочное устройство.
)
в конструкции механизма предусматривается
специальное регулировочное устройство.
Регулировка
величины момента уравновешивающего
механизма при колебании температуры
окружающей среды производится либо за
счет изменения плеча действия силы
h,
либо за счет под- Держания постоянного
значения силы![]() иликомбинированным
способом. При этом постоянное значение
силы
иликомбинированным
способом. При этом постоянное значение
силы![]() поддерживается
компенсационным или объемным способом.
поддерживается
компенсационным или объемным способом.
Компенсационный способ заключается в том, что за счет дополнительного подвода (отвода) газа из отдельных емкостей (компенсаторных баллонов) в колонке устанавливают требуемое Давление. Объем газа в цилиндрах при этом способе регулировки е изменяется, а количество его меняется.
Объемный способ установления заданного давления газа задается в том, что путем изменения объема, занимаемого определенным количеством газа, поддерживают давление газа требуемой величины.
Задача расчета пневматического уравновешивающего механизма сводится к определению:
величины силы уравновешивающего механизма, при которой достигается равенство моментов Мк и Му для заранее принятых углов возвышения качающейся части;
наибольшего объема воздуха;
конструктивных размеров механизма;
прочности деталей механизма.
Расчет сил пневматического уравновешивающего механизма ведется аналогично пружинному.
Определяют рабочую площадь поршня 5, предварительно задавшись начальным давлением в колонке уравновешивающего механизма /?о=(4-нЮ) 106 Н/м2.
Устанавливают приведенную длину начального объема газа по зависимости


— полный ход подвижного шарнира;
—
![]() степень
сжатия газа в колонке механизма;
степень
сжатия газа в колонке механизма;
п — показатель политропы. 3. Определяют начальный объем газа
![]()
4. Вычисляют силу трения Т в уплотнительных устройствах механизма по формуле
![]()
![]()
Действительная сила уравновешивающего механизма Рэу, приложенная к качающейся части, определяется по зависимости
![]()
где знак «—» берется при подъеме качающейся части, а « + » при опускании.
Затем
вычисляют моментыи
А1у
дляуглов <рг с интервалом 10—15° и строят
графики
![]() и
и
![]() как
для случая
как
для случая
опускания,
так и для подъема качающейся части,
после чего определяют ДМтах для
указанных выше случаев и величины усилия
на маховике подъемного механизма при
![]()
Цилиндры механизма рассчитывают на прочность, как толстостенные трубы, по зависимости

Конструктивные размеры цилиндров выбираются такими, чтобы в них помещался расчетный объем газа при давлении р0.