

2 Практическая часть
2.1 Построение структурной схемы аэп
Для построения структурной схемы, необходимо проанализировать работу данного механизма – лифта.
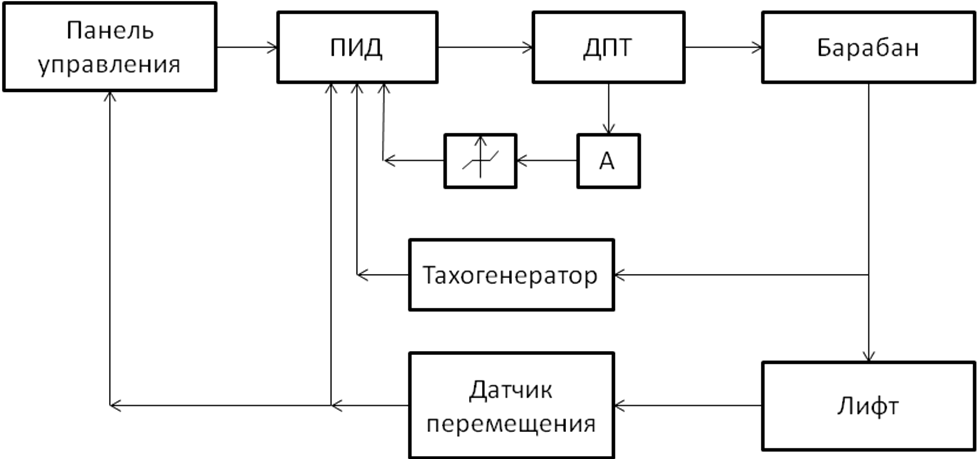
Рисунок 2.1 – структурная схема электропривода.
Схема состоит из следующих элементов:
-
панель управления;
-
ПИД-регулятор;
-
ДПТ;
-
барабан;
-
кабина лифта;
-
обратная связь по току с отсечкой;
-
тахогенератор;
-
датчик перемещения.
Панель управления(ПУ) содержит кнопки вызова лифта и дисплей, на котором отображается информация о положении лифта. С ПУ сигнал поступает на ПИД-регулятор, который является функциональной частью схемы. С его помощью происходит управление входным сигналом электропривода и задание режимов работы. Далее сигнал идет на двигатель постоянного тока, который приводит в движение барабан с тросом, и поднимает(опускает) кабину лифта.
В схеме присутствуют три обратные связи:
-
по току с отсечкой;
-
по перемещению кабины лифта;
-
по скорости вращения ротора двигателя.
Для контроля перемещения кабины лифта можно использовать фотоэлектрический датчик перемещений. Датчики такого типа позволяют контролировать перемещения на любые расстояния.
Для контроля скорости вращения ротора можно использовать тахогенератор. Он измеряет угловую скорость ротора и подает эту величину со знаком «минус» на ПИД-регулятор, что приводит к изменению управляющего сигнала и стабилизации скорости вращения ротора.
Для контроля величины тока якорной обмотки используется обратная связь по току с отсечкой. С ее помощью «обрезаются» большие пусковые токи, что уменьшает вероятность поломки двигателя из-за высокого значения входного тока.
2.2 Синтез математической модели объекта
Рассмотрим «физику» процесса перемещения кабины лифта.
Составим уравнение, используя второй закон Ньютона
∑ F(t)=m(t)·a(t) (2.1)
где ![]() ;
;
![]() ,
,
g – ускорение свободного падения, g=9.81 м/с2.
 ;
;
ml – масса кабины лифта, ml=450 кг;
mnm – масса погонного метра троса, mnm=8 (кг/м);
Fg(t)
– сила, развиваемая двигателем,
 ;
;
![]() - сила трения в подшипниках,
- сила трения в подшипниках,
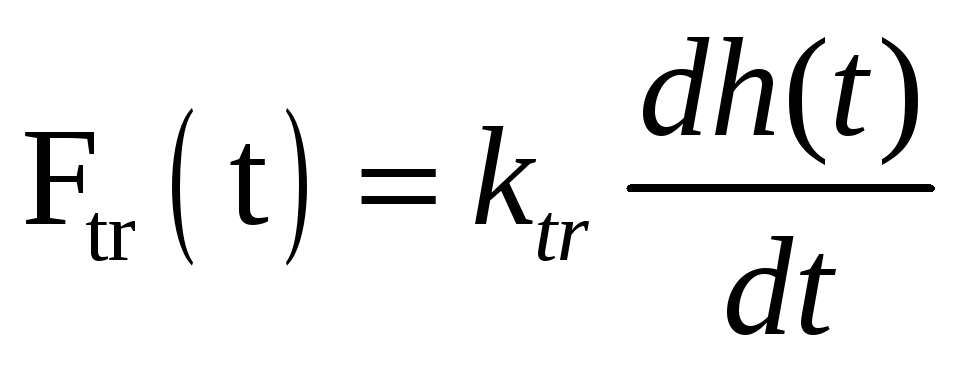 ;
;
![]() - момент двигателя;
- момент двигателя;
![]() - радиус барабана,
- радиус барабана,
![]() м;
м;
![]() - коэффициент трения в подшипниках,
- коэффициент трения в подшипниках,
![]() .
.
Тогда дифференциальное уравнение системы будет иметь вид:
 (2.2)
(2.2)
Преобразуем это уравнение в более удобный вид и построим его визуальную модель в среде Simulink.
 (2.3)
(2.3)
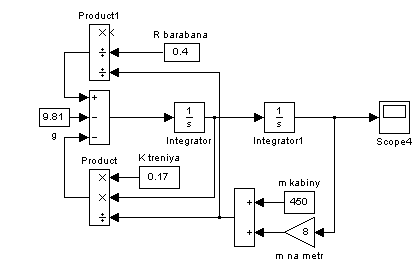
Рисунок 2.2 – визуальная модель дифференциального уравнения системы.
2.3 Расчет параметров дпт
Сопротивление обмотки якоря определяется по закону Ома для участка цепи:
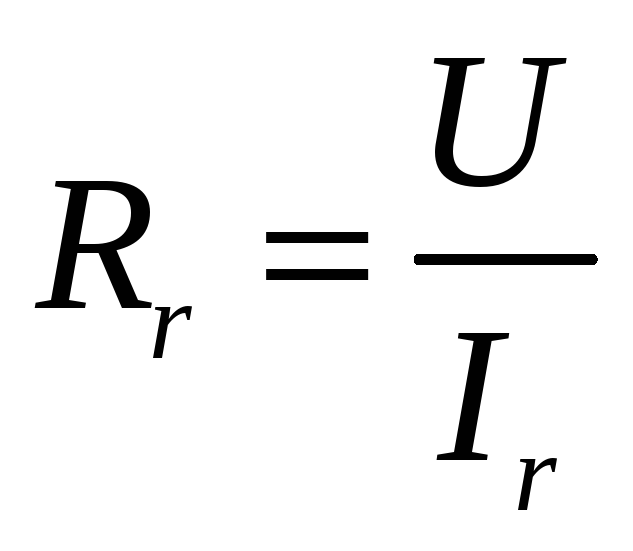 (2.4)
(2.4)
![]() (Ом)
(Ом)
Индуктивность обмотки якоря:
 (2.5)
(2.5)
![]() (Гн)
(Гн)
Индуктивность обмотки возбуждения:
 (2.6)
(2.6)
![]() (Гн)
(Гн)
Взаимная индуктивность между цепью якоря и цепью обмотки возбуждения:
 (2.7)
(2.7)
![]() (Гн)
(Гн)
Потери мощности ДПТ складываются из механических потерь и электромагнитных потерь.
Механические потери определяются от номинальной мощности ДПТ:
![]() (2.8)
(2.8)
![]() (Вт)
(Вт)
Коэффициент вязкого трения:
 (2.9)
(2.9)
![]()
Коэффициент сухого трения:
 (2.10)
(2.10)
![]()