

2.4 Построение в MatLab релейной схемы управления

Рисунок 2.3 – релейная схема управления электроприводом
Промоделировав полученную схему, мы получили:

Рисунок 2.4 – угловая скорость вращения ротора
Двигатель разгоняется до скорости 32 рад/сек за четыре этапа, время регулирования t=32 с.

Рисунок 2.5 – ток якоря
Пусковой ток за 32 секунды устанавливается в 24.7 А .

Рисунок 2.6 – график переходного процесса электропривода

Рисунок 2.7 – механическая характеристика ДПТ
Двигатель имеет четырехступенчатую механическую характеристику.

Рисунок 2.8 – механическая характеристика электропривода
2.5 Построение в MatLab схемы управления с регулированием по скорости

Рисунок 2.9 – схема управления электроприводом по скорости
Промоделировав полученную схему, мы получили:
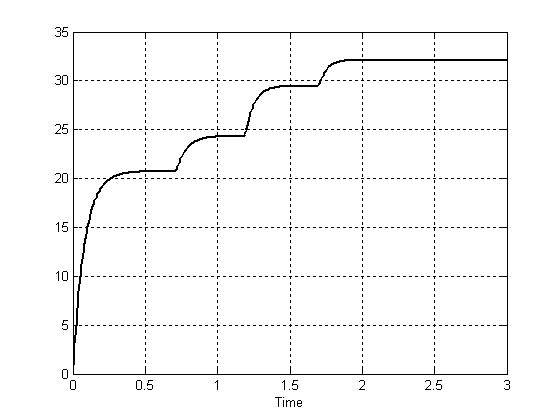
Рисунок 2.10 – угловая скорость вращения ротора
Как и в прошлом методе регулирования, двигатель разгоняется до скорости 32 рад/сек. Время регулирования t=2с.

Рисунок 2.11 – ток якоря
Ток якоря достигает установившегося значения 24.7 А за 2 секунды.

Рисунок 2.12 – график переходного процесса электропривода

Рисунок 2.13 – механическая характеристика ДПТ

Рисунок 2.14 – механическая характеристика электропривода
2.6 Построение в MatLab схемы управления с пид-регулятором

Рисунок 2.15 – схема управления электроприводом при помощи ПИД-регулятора
Промоделировав полученную схему, мы получили:

Рисунок 2.16 – угловая скорость вращения ротора
Двигатель с ПИД-регулятором разгоняется до скорости 1800 рад/сек за 20 секунд.

Рисунок 2.17 – ток якоря
Значение тока якоря составляет 1280 А.

Рисунок 2.18 – график переходного процесса электропривода.
Переходный процесс достигает установившегося режима за 15 секунд.

Рисунок 2.19 – механическая характеристика ДПТ

Рисунок 2.20 – механическая характеристика электропривода
2.7 Сравнительный анализ разработанных систем управления
|
Критерий |
Релейная система |
Регулирование по скорости |
ПИД-регулятор |
|
Скорость вращения ротора, С-1 |
32.1 |
32.1 |
1777 |
|
Ток якоря, А |
23.1 |
23.2 |
1282 |
|
Момент вращения ротора, об/мин |
37.6 |
37.6 |
2080 |
|
Время регулирования, с |
32 |
2 |
20 |
Выводы
В данном курсовом проекте я разработал систему автоматического управления электроприводом грузового лифта с двигателем постоянного тока. Были разработано три системы управления: релейная система, система регулирования по скорости и система регулирования с ПИД-регулятором. Также были построены в среде Simulink имитационные модели для каждой из систем. После моделирования я получил графики выходных характеристик электропривода и по этим данным сделал анализ систем и выбрал лучшую.
Для регулирования электропривода лифта наиболее выгодно использовать ПИД-регулятор, потому что в данном случае мы получаем более высокие выходные характеристики за меньшее время, по сравнению с другими системами управления. А также только с помощью этого метода регулирования система устойчива и можно добиться желаемого результата. Однако, ПИД-регулятор имеет недостаток – высокий пусковой ток, который приводит к большим энергетическим затратам для реализации этого способа регулирования.
Список использованных источников и литературы
-
Дементьев Ю.Н., Чернышев А.Ю., Чернышев И.А. «Автоматизированный электропривод: Учебное пособие» – Томск: Изд-во ТПУ, 2009. – 224 с.
-
http://freepapers.ru
-
http://energo20.ru
-
А. А. Осьмачко «Лабораторный практикум по дисциплине «Автоматизированный электропривод» - Харьков: ХНАДУ, 2008.-40 с.
-
Конспект лекций по дисциплине «Автоматизированный электропривод».
