

3. Выбор структуры системы управления и ее элементов
Структура схемы управления ЭП выбирается исходя из требований к качеству процесса регулирования, простоты реализации и других факторов, к которым можно отнести я собственный опыт проектировщика. Примеры различных вариантов упрощенных функциональных схем САР ЭП, используемых на практике, приведены на рис. 6.
В схемах с последовательной коррекцией элементы: регулятор скорости (PC, рис. 6, а) и регулятор тока (РТ, рис.6, б) установлены в прямой цепи последовательно с силовой частью ЭП. В цепях обратных связей по скорости (ОСС) и току (ОСТ) установлены измерительные преобразователи по соответствующим параметрам.
В САР с параллельной коррекцией (рис.6, в, г) схемы коррекции по скорости (СКС) и току (СКТ) включают в себя измерительно-преобразовательные устройства и корректирующие элементы, а в прямой цепи установлен только суммирующий усилитель (УС), функциями которого является суммирование различных, сигналов: Uзc - задание скорости, Uосс - ОСС, Uост - ОСТ, Uки - коррекция по возмущающему воздействию (моменту сопротивления - Мс), а также обеспечение требуемого значения коэффициента усиления разомкнутой системы, определяющего величину установившейся ошибки.
При выборе структуры управления ЭП следует руководствоваться следующими рекомендациями:
1. САР с последовательной коррекцией отличаются более простыми методами синтеза и более удобны в эксплуатации (особенно при наладочных работах). Для тиристорного ЭП последовательная коррекция стала особенно перспективной после освоения промышленностью выпуска высоконадежных унифицированных блоков системы регулирования (УБСР), в комплект которой входят все необходимые элементы для построения САУ.
Функциональные схемы САР частоты вращения ЭП

2. Одноконтурные системы (рис. 6, а) достаточно просты, что является их достоинством, однако обладают рядом недостатков, из которых можно отметить следующие:
более сложный тип контурного регулятора, что значительно затрудняет наладку САР;
необходимость использования специальных средств для ограничения якорного тока;
большая динамическая ошибка системы при колебаниях напряжения сети, т.к. процесс регулирования ЭДС УП начинается только после отклонения скорости. Это особенно характерно для ТП, в котором колебания напряжения сети вызывают такие же колебания выходного напряжения. Для компенсации влияния колебаний напряжения сети можно рекомендовать структуру с комбинированным регулированием;
нелинейность характеристик УП сказывается непосредственно на работе контура скорости.
Отмеченные выше недостатки в значительной степени устраняются в двухконтурных САР, имеющих внешний контур скорости с PC и подчиненный ему внутренний контур тока с РТ (рис.6, б).
Система управления ЭП с электромашинными преобразователями может оказаться более простой (рис. 6, в), однако при этом возникает трудность с реализацией промежуточного усилителя постоянного тока УС, который должен иметь высокостабильные характеристики. Следует также отметить и более низкий КПД электромашинных преобразователей по сравнению со статическими.
В системах Г-Д для регулирования потока возбуждения машин необходим источник регулируемого напряжения, в качестве которого в настоящее время широко используются ТП и ШИП. В этом случае можно использовать систему подчиненного регулирования. При этом не рекомендуется иметь число контуров более трех, т.к. при росте их числа снижается быстродействие САР.
В схемах САР с параллельной коррекцией число контуров не влияет на быстродействие системы, однако по другим показателям они проигрывают перед САР с подчиненным регулированием параметров.
Схема контура скорости с блоком ограничения
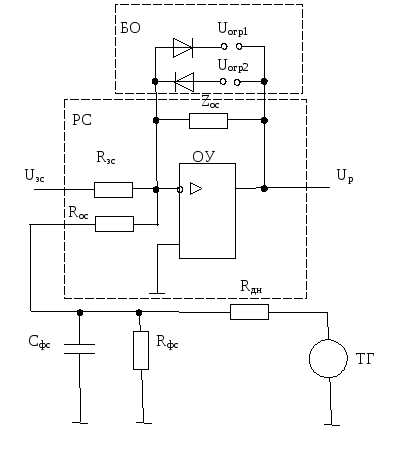
Рис. 7
В проекте рекомендуется использовать структуры САР с последовательной коррекцией, реализованной на стандартных элементах УБСР (Прил.8).