

3.3. Ограничение промежуточных координат
В процессе управления ЭП часто оказывается необходимым ограничивать пределы изменения одной или нескольких промежуточных координат. В частности, при стабилизации частоты вращения двигателей постоянного тока необходимо ограничивать их ток: Iд <= Iд.max В двухконтурных САР эта задача решается сравнительно просто с помощью блока ограничения (ВО) (рис.7), установленного в цепи обратной связи (ОС) PC. До тех пор пока Up < Uогр., ток ОС протекает через Zос , а диоды Д1 и Д2 закрыты. При увеличении входного сигнала ОУ его выходное напряжение Up может достичь значения Uогр , в результате чего один из диодов ( в зависимости от полярности входного сигнала) откроется и напряжение Uогр окажется включенным параллельно выходу ОУ. При малом внутреннем сопротивлении источника Uoгр и открытом диоде дальнейшее увеличение входного сигнала не будет приводить к увеличению напряжения на выходе PC, и оно останется постоянным. При уменьшении входного сигнала ОУ выйдет из ограничения и регулятор будет работать в нормальном режиме.
В одноконтурных системах используются специальные схемы ограничения тока или при Iд ≥Iд.max PC переключается на режим работы РТ с помощью специального логического устройства, обеспечивал ограничение якорного тока. На рис.9 показан, один из вариантов схемы ограничения тока, состоящей из делителя Rд и диодного моста, в диагональ которого подано напряжение ограничения от стабилизированного источника. Коэффициент делителя Кд и напряжение ограничения Uогр выбираются из условия:
-![]() компенсация
ЭДС двигателя,
компенсация
ЭДС двигателя,
![]()
- компенсация падения напряжения в якорной цепи, откуда требуемые параметры определятся:
![]()
При таком выборе параметров и работе двигателя в нормальном режиме выполняется соотношение:
![]()
В этом случае диоды моста заперты, а управление ТП осуществляется в соответствии с сигналом Up . Если в процессе работы знак неравенства изменится, например, за счет резкого увеличения сигнала задания на PC или уменьшения частоты вращения двигателя, то открываются диоды (для указанной на схеме полярности сигналов Uтг , Uoгр, Up ) и управляющий сигнал на СИФУ ТП ограничивается таким образом, что выходное напряжение ТП остается всегда
![]()
Схема токовой отсечки
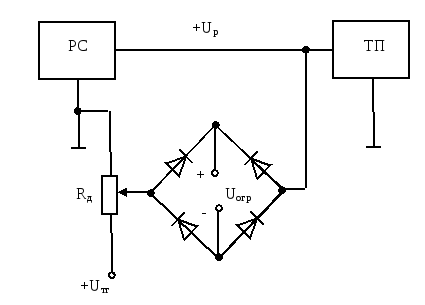
Рис. 9
3.4. Задающее устройство
Задающее устройство (ЗУ) включает в себя схемы задания скорости (ЗС) и задания интенсивности (ЗИ).
ЗС предназначено для формирования сигнала Uс , величина которого соответствует заданной скорости вращения двигателя, а полярность - направлению вращения. Пример схемы ЗС приведен на рис.10.
Схема задания скорости

Рис.10
При нажатии, например, на кнопку "вперед" (KB), установленную на пульте управления рабочего механизма, срабатывает реле РВ, блокируя своим контактом РВ3 кнопку КВ. Через замыкающие контакты PB1 и РВ2 подается напряжение от стабилизированного источника ucИh на потенциометр Rc , обеспечивая положительную полярность сигнала Uc,. величина которого устанавливается движком потенциометра. При нажатии на кнопку "назад" (КН) цепь питания РВ размыкается, а РН - замыкается, что приводит к смене полярности Uc . При нажатии на кнопку "стоп" (КС) обесточивается любое управляющее реле, c целью задания допустимого темпа разгона и торможения привода в системе может быть применен задатчик интенсивности (ЗИ), формирующий на своем выходе линейно-нарастающее напряжение при ступенчатой форме входного сигнала Uc Показанный на рис. 11 ЗИ включает в себя усилитель (У), с большим коэффициентом усиления, интегратор (И) и инвертор (ИН).
Выходное напряжение усилителя ограничено некоторым значением Uoгp с помощью блока ограничения (БО). Если на вход ЗИ поступает ступенчатый сигнал Uс, на выходе усилителя сразу устанавливается напряжение Uoг , а напряжение на выходе интегратора изменяется линейно:
![]()
где
![]() - постоянная времени ЗИ.
- постоянная времени ЗИ.
При этом ускорение разгона или торможения двигателя будет пропорционально скорости изменения входного сигнала Uзс (t)
![]()
Схема задатчика интенсивности

Рис.11
Это ускорение следует подобрать при наладочных работах так, чтобы при известной зависимости Mрм(ω) якорный ток, определенный из выражения
![]() ,
,
не превышая допустимого значения Iд≤ Iд.max.
Подбор нужного ускорения осуществляется за счет подстройки Rзи или Uoгр.
4. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЭЛЕМЕНТОВ САР
Для решения задач анализа и синтеза САР необходимо определить динамические характеристики элементов системы. Эти характеристики могут быть представлены в различных формах: дифференциальные уравнения, временные характеристики, передаточные функции (ПФ) и частотные характеристики (ЧХ). В практике инженерных расчетов широкое распространение получили ПФ и ЧХ.
4.I. Двигатель постоянного тока независимого возбуждения Линейная модель двигателя может быть записана в виде ПФ по управлению якорным напряжением Uд:
![]()
где по возмущению со стороны момента сопротивления Mс
![]() ,
,
где
![]() -
коэффициент передачи (усиления) двигателя
по
управлению;
-
коэффициент передачи (усиления) двигателя
по
управлению;
![]() -
коэффициент передачи по
возмущению;
-
коэффициент передачи по
возмущению;
![]() -
электромагнитная постоянная времени
якорной цепи ЭП;
-
электромагнитная постоянная времени
якорной цепи ЭП;
![]() -
электромеханическая постоянная
времени ЭП;
-
электромеханическая постоянная
времени ЭП;
![]() -
суммарный момент инерции
ЭП, приведенный к валу двигателя;
-
суммарный момент инерции
ЭП, приведенный к валу двигателя;
![]() -
суммарный маховый момент
рабочего механизма
и редуктора;
-
суммарный маховый момент
рабочего механизма
и редуктора;
![]() -
коэффициент соотношения масс (задан в
ТЗ). Иногда
бывает полезным преобразовать ПФ
двигателя к виду:
-
коэффициент соотношения масс (задан в
ТЗ). Иногда
бывает полезным преобразовать ПФ
двигателя к виду:
![]() ;
;
![]()
где
![]() - постоянные времени;
- постоянные времени;
![]() -
корни характеристического
уравнения;
-
корни характеристического
уравнения;
![]() -
коэффициент
демпфирования.
-
коэффициент
демпфирования.
Если ξ<1, то указанное разложение невозможно, т.е. якорная цепь обладает свойствами колебательного звена. Такое положение является нежелательным и следует поискать пути его устранения (уменьшить индуктивность якорной цели, увеличить мощность двигателя и т.д.). Если решить эту задачу простыми средствами не удается, то структура управления такого ЭП должна содержать не меньше двух контуров.
Структурная схема двигателя представлена на рис.12, а. В некоторых случаях более удобными являются структурные схемы, показанные на рис.12, б, в.
Структурные схемы двигателя
![]()

![]()

![]()
![]()
![]()
![]()




![]()
![]()
![]()
![]()
![]()
![]()







![]()
![]()
![]()

![]()
![]()


![]()
Ке
![]()
![]()
![]()
![]()


![]()
![]()





Ке
![]()
![]()
![]()


Рис.12