

Приложение а
Обозначения условные графические элементов машин и механизмов
на чертежах и схемах

Приложение б
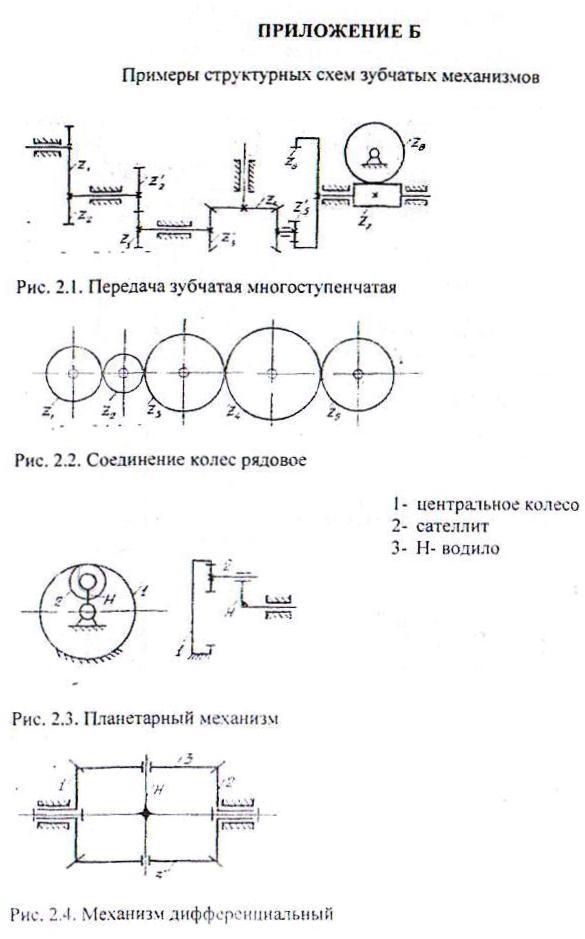
Примеры структурных схем зубчатых маханизмов
Лабораторная работа № 3
«Определение момента инерции шатуна методом физического маятника»
ЦЕЛЬ РАБОТЫ: приобретение практических навыков по экспериментальному определению положения центра масс и момента инерции звеньев удлинённой формы с отверстиями.
ВВЕДЕНИЕ
Моменты инерции звеньев можно определить аналитическими и экспериментальными методами. Для звеньев сложной конфигурации экспериментальные методы дают более точные результаты. Наиболее употребляемыми из методов экспериментального определения момента инерции звена в лабораторной практике являются: метод физического маятника, метод двухниточного подвеса, метод трехниточного подвеса, метод крутильных колебаний на упругом стержне и т.д.
Для звеньев удлиненной формы, имеющих отверстия, в том числе для шатунов стержневых приборов и механизмов, наиболее пригоден метод физического маятника.
1. Метод физического маятника
Физический
маятник представляет собой твердое
тело (например звено механизма - шатун),
совершающее под действием силы тяжести
колебания вокруг неподвижной горизонтальной
оси подвеса (рисунок 1).Движения такого
маятника при углах отклонения
![]() <7°
вполне аналогичны движению математического
маятника,совершающему гармонические
колебания.
<7°
вполне аналогичны движению математического
маятника,совершающему гармонические
колебания.
Математическим маятником (рисунок 2) является материальная точка, подвешенная на нерастяжимой, тонкой, длинной и невесомой нити.Период гармонических колебаний Т определяется по формуле
T
=
![]() ,
,
откуда искомый момент инерции массы шатуна относительно оси О подвеса
![]() ,
,
где G=mg– сила веса шатуна, Н,
а– расстояние от оси О подвеса до центра тяжестиSшатуна, м.
В практике обычно определяют момент инерции звена относительно оси, проходящей через центр тяжести звена перпендикулярно плоскости движения звена, так как у множества механизмов отдельные звенья совершают плоские движения. Момент инерции ISмассы шатуна относительно центральной оси, проходящей через центр тяжестиS, определяется на основании теоремы Штейнера о моментах инерции относительно параллельных осей
![]() ,
,
тогда
![]() ,
(1)
,
(1)
где Т - период колебаний шатуна относительно оси О подвеса, с,
![]() -
расстояние от оси О подвеса до центра
тяжестиSшатуна, м.
-
расстояние от оси О подвеса до центра
тяжестиSшатуна, м.

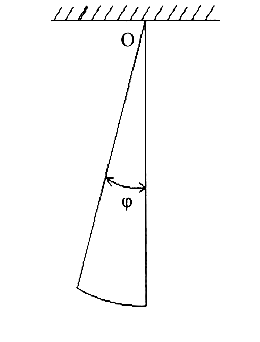
Рисунок1-Физический маятник Рисунок 2 – Математический маятник

Рисунок 3 – Шатун, уравновешенный Рисунок 4 – Стойка с призмой
на призме

Рисунок 5 – Стержень постоянного сечения
При
![]() <7°
ошибка, которую дает формула (2), не
превышают 0,1 %, поэтому метод физического
маятника можно использовать для
большинства случаев инженерной практики.
<7°
ошибка, которую дает формула (2), не
превышают 0,1 %, поэтому метод физического
маятника можно использовать для
большинства случаев инженерной практики.