

11.6.2 Центральна система
На рис. 11.2 представлена мережа, яка отримала назву центральна система.

Рис. 11.2 – Центральна система
Виміряні 15 кутів. Шуканих пунктів 4. Кількість умовних рівнянь

Як це випливає з креслення (рис. 11.2), маємо 5 умовних рівнянь фігур





На пункті В виміряні пункти замикають горизонт, тобто їх сума теоретично дорівнює 360°. Звідси виникає ще одна геометрична умова – умова горизонту.

Якій відповідає умовне рівняння

де
 .
.
На підставі теореми синусів може бути записана умова полюса вигляду (11.45)
 (11.48)
(11.48)

де

Подальша послідовність зрівнювальних обчислень принципово не відрізняється від розглянутої в п. 11.6.1.
11.6.3 Вставлення в жорсткий кут
Як видно з рис. 11.3, в цій системі виміряні 9 кутів. Шуканих пунктів 2.
Кількість умовних рівнянь

Маємо три умови фігур



В цій мережі кутів АОВ – жорсткий кут, бо він дорівнює різниці вихідних дирекційних кутів

де
 – дирекційні кути лінійOA
і OB.
– дирекційні кути лінійOA
і OB.

Рис. 11.3 – Вставлення в жорсткий кут
Звідси виникає умова дирекцій них кутів

якій відповідає умовне рівняння

де

В цій мережі сторони ОА і ОВ – жорсткі. Як це видно з рис. 11.3, на підставі теореми синусів можна записати рівняння сторін

Продиференціювавши
це рівняння
за
змінними
 запишемо умовне рівняння
запишемо умовне рівняння

де

Послідовність подальшої обробки викладена в п. 11.6.1.
11.6.4 Ланцюг трикутників між двома сторонами, довжини і дирекційні кути яких відомі
В мережі виміряні 15 кутів (рис. 11.4). Так як мережа вільна, кількість шуканих пунктів р = 6, приймаючи до уваги, що координати одного з пунктів або відомі, або приймаються умовно. Відповідно кількість незалежних умов буде дорівнювати

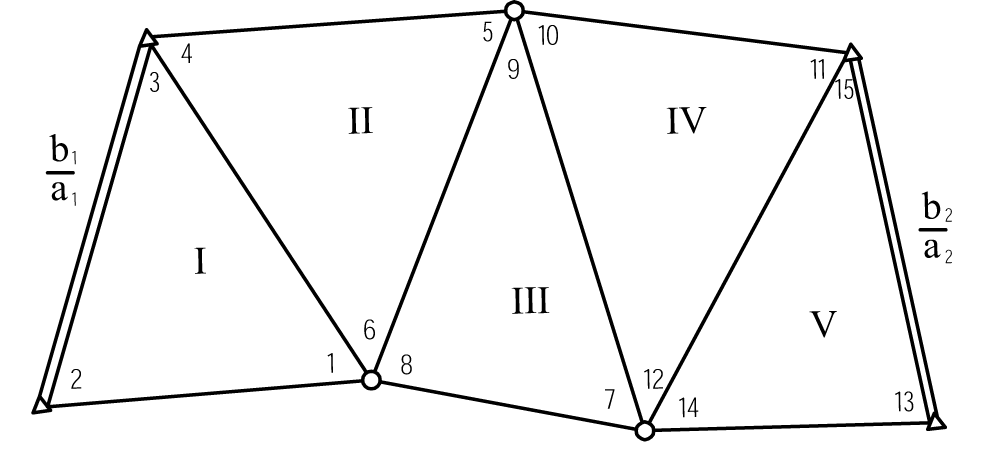
Рис. 11.4 – Мережа трикутників
В цій мережі маємо:
П’ять умовних рівнянь фігур





Умова дирекційних кутів

якій відповідає умовне рівняння

де

На підставі теореми синусів можемо записати умову сторін

Продиференцюємо
цей вираз за змінними
 ,
і отримаємо умовне рівняння
,
і отримаємо умовне рівняння


де

Послідовність подальшої обробки викладена в п. 11.6.1.
12. Зрівнювання системи виміряних величин, пов’язаних умовами, з додатковими невідомими
Розглянемо цей спосіб стосовно до зрівнювання мереж полігонометрії. Мережа полігонометрії включає вихідні і шукані пункти. Серед шуканих пунктів слід особливо виділити вузлові точки.
Ходи полігонометрії можуть бути трьох видів:
хід між двома вихідними пунктами (рис. 12.1 а);
хід між вихідним пунктом і вузловою точкою (рис. 12.1 б);
хід між двома вузловими точками (рис. 12.1 в);



Рис. 12.1 – Полігонометричні ходи
У
кожному ході вимірюється n
сторін і
 кутів. Загальне число вимірів становить
кутів. Загальне число вимірів становить .
З
іншого боку хід з n
сторін включає
.
З
іншого боку хід з n
сторін включає
 шуканих точок, тобто необхідно визначити
шуканих точок, тобто необхідно визначити координат.
координат.
Таким чином, число надлишкових вимірів дорівнюватиме

Отже, в будь-якому ході незалежно від числа шуканих точок виникає тільки три умовні рівняння.
Будемо
вважати, кути
 виміряними
незалежно і рівноточно. Сторони
виміряними
незалежно і рівноточно. Сторони
 також
виміряними незалежно і рівноточно, що
практично має місце, якщо лінії виміряні
світлодальноміром, а сторони мають
приблизно однакову довжину.
також
виміряними незалежно і рівноточно, що
практично має місце, якщо лінії виміряні
світлодальноміром, а сторони мають
приблизно однакову довжину.
Так як кути і довжини сторін – об'єкти різного роду, виміри у полігонометрії у загальному випадку – нерівноточні. Звідси виникає необхідність встановлення відносних ваг кутових і лінійних вимірів.
Прийнявши
ваги вимірюваних кутів рівними одиниці,
тобто
 ,
відповідно
з формулами (6.1) і (6.2) з ваги вимірюваних
сторін будуть дорівнювати:
,
відповідно
з формулами (6.1) і (6.2) з ваги вимірюваних
сторін будуть дорівнювати:

де
 і
і –
стандарти, що характеризують точність
вимірювання кутів і довжин сторін
відповідно. Ці величини для відповідного
класу (розряду) полігонометрії
встановлюються нормативними документами.
Стосовно до нормативів розробляється
методика виконання кутових і лінійних
вимірів.
–
стандарти, що характеризують точність
вимірювання кутів і довжин сторін
відповідно. Ці величини для відповідного
класу (розряду) полігонометрії
встановлюються нормативними документами.
Стосовно до нормативів розробляється
методика виконання кутових і лінійних
вимірів.
Ваги
 мають
розмірність
мають
розмірність
 .
.
Зрівнювання полігонометричного ходу розглянемо на найбільш загальному прикладі ходу між двома вузловими точками, маючи на увазі, що інші два види – окремі випадки від загального.
Отже, в ході виникає три умовних рівняння:
Рівняння кутів

де
 –
поправки в виміряні кути,
–
поправки в виміряні кути,
 ,
, –
поправки в наближені дирекційні кути
початкових і кінцевих сторін ходу
відповідно,
–
поправки в наближені дирекційні кути
початкових і кінцевих сторін ходу
відповідно,

–
кутова
нев’язка ходу,
 – наближені значення дирекційних кутів
початкових і кінцевих сторін ходу
відповідно.
– наближені значення дирекційних кутів
початкових і кінцевих сторін ходу
відповідно.
Умова абсцис

Умова ординат

У цих висловлюваннях прийняті наступні позначення:
 ,
,

 ,
,
 ,
, ,
, – поправки до наближених координат
початкової та кінцевої точки ходу,
– поправки до наближених координат
початкової та кінцевої точки ходу,
 ;
;
 –
нев’язки в приростах координат,
–
нев’язки в приростах координат, ,
, –
приріст координат,
–
приріст координат,
 ,
, ,
, ,
, –
наближені координати початкової і
кінцевої точок ходу.
–
наближені координати початкової і
кінцевої точок ходу.
Приріст
координат
 ,
, –
функції виміряних сторін і кутів
–
функції виміряних сторін і кутів ,
,
 ,а
тому величини залежні.
,а
тому величини залежні.
Ось чому друге і третє умовне рівняння необхідно перетворити, представивши поправки до приростів координат через поправки виміряних кутів та сторін.Опускаючи перетворення, запишемо ці рівняння:

 (12.2)
(12.2)

 .
(12.3)
.
(12.3)
Умовні
рівняння (12.1), (12.2), (12. 3) окрім поправок
до безпосередньо виміряних кутів і
довжин сторін містять також поправки
до наближених дирекційних кутів
 і поправки до наближених координат
і поправки до наближених координат
 ,
,
 ,
, тобто
до функцій виміряних величин, як це має
місце в параметричному способі. Таким
чином, ми маємо справу з поєднанням
способу вимірів, пов'язаних умовами, і
параметричного способу.
тобто
до функцій виміряних величин, як це має
місце в параметричному способі. Таким
чином, ми маємо справу з поєднанням
способу вимірів, пов'язаних умовами, і
параметричного способу.
Врівноваження такого роду систем отримало назву спосіб умов з додатковими невідомими.
Розглянемо його більш детально в загальному вигляді. Нехай є система r рівнянь, що включає n поправок і t додаткових невідомих:
 (12.4)
(12.4)
або в матричному вигляді:
 .
.
Так
як
 ,
деr
– число умовних рівнянь, n
– число вимірів, t
– число додаткових невідомих, система
не має єдиного розв’язання.
,
деr
– число умовних рівнянь, n
– число вимірів, t
– число додаткових невідомих, система
не має єдиного розв’язання.
Для розв’язання під умовою [v2] = min запишемо функцію Лагранжа:





Взявши
часткові похідні за змінними

 ,…,
,…, одержимо систему рівнянь наступного
вигляду
одержимо систему рівнянь наступного
вигляду


 або
або


Диференціюючи ту ж систему по змінним δx, δy,…, δt і прирівнявши часткові похідні до нуля, отримаємо систему рівнянь
 або
або
 (12.6)
(12.6)
Підставимо v з (12.5) в (12.4), приєднаємо до неї систему (11.6), отримаємо матричне рівня (12.7)

яке складається з наступних блоків

Розв’язавши систему (12.7)

знаходимо кореляти k та поправки до додаткових невідомих δ.
Так як матриця включає нульовий блок, діагональні елементи матриці G-1, які відповідають цьому блоку стають негативними.
Підставивши кореляти в (12.5), отримаємо поправки до виміряних величин – кутів і довжин сторін. Контроль обчислень здійснюється шляхом підстановки зрівняних значень виміряних величин і додаткових невідомих у вирази для обчислення вільних членів (нев'язок) умовних рівнянь. У результаті повинні виходити нулі.
Середня квадратична похибка одиниці ваги в цьому способі зрівнювання обчислюється за формулою:

а її надійність – за формулою:

де R – кількість ходів, T – кількість вузлових точок.
Таким чином, на прикладі зрівнювання мережі полігонометрії розглянуто корелатний спосіб зрівнювання систем вимірюваних величин, пов’язаних умовами з додатковими невідомими.
Додаток |застосування| А