


УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
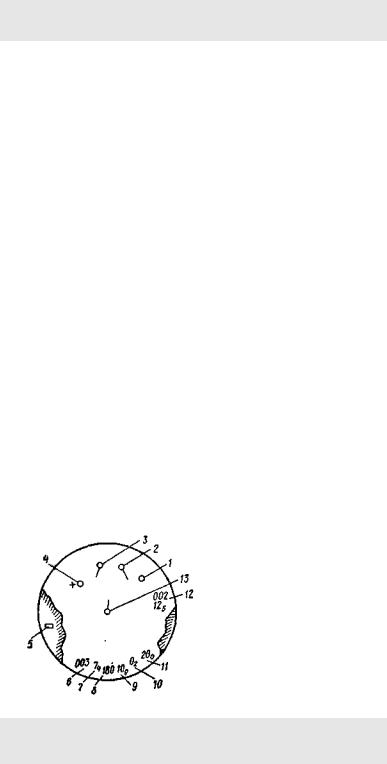
Таблица 16 Число проводок Судов БПЧАМ за период 1966—1980 гг.
|
|
|
|
|
- |
|
|
|
|
|
для, |
эффек |
|
|
|
|
Проведено судов |
Количество |
|
считана |
Эффективность |
||
|
|
- рас |
|||||
Период |
флота |
|
|
которых тивность |
|
|
|
|
Минмор- |
за |
судов |
|
судо-сутки |
тыс. р |
|
|
Минрыбхо- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Восьмая пяти- |
670 |
12 |
|
179 |
41 |
182 |
|
летка (1966— |
|
||||||
1970 гг. ) |
|
|
|
|
|
|
|
Девятая пяти- |
2132 |
371 |
|
869 |
380 |
1648 |
|
летка(1971— |
|
||||||
|
|
|
|
|
|
|
|
1975 гг. ) |
|
|
|
|
|
|
|
Десятаяпяти- |
3547 |
507 |
|
1761 |
935 |
581 |
|
летка(1976— |
|
||||||
|
|
|
|
|
|
|
|
1980 гг.) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мосфере, частой повторяемостью штормов, интенсивным волнением и опасностью обледенения. В этот период методу выбора пути на основе средних статистических данных о распределении гидрометеорологических элементов следует предпочитать проводку судна гидрометеослужбой, что позволит обойти районы с наиболее неблагоприятными, а в некоторых случаях и опасными условиями плавания.
§14 ОСОБЕННОСТИ УПРАВЛЕНИЯ СУДНОМ ПРИ РАСХОЖДЕНИИ С ДРУГИМИ СУДАМИ
Анализ аварийности в мировом морском флоте показывает, что около 5% общей численности судов в течение последних 30 лет ежегодно терпят аварии от столкновений. ВНовороссийскомморскомпароходствезапериод 1970—1980 гг. на столкновения приходилось 19% общего числааварийнасудахпароходства.
Наибольшее число столкновений в мировом флоте (90—95%) происходитвприбрежныхрайонахоживленного судоходства северо-западной Европы, северной Америки, юго-восточной Азии и Японии, нарайоныоткрытогоморя приходится лишь 5—10%. Однако столкновения в открытом мореимеютболеетяжелыепоследствия, так как суда в таких районах обычно, следуют
– 138 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
полным ходом, что приводит при столкновениях к серьезнымповреждениям, аиногдакгибелисудовилюдей.
При расхождении крупнотоннажных судов в открытом море с другими судами необходимо уделять особое внимание конструктивным, тактико-техническим и маневренным качествам судна. Большие размерения крупнотоннажных судов увеличивают площадь маневра и требуют учета свободного прохождения при маневре оконечности судна на достаточном расстоянии от другого судна. При наличии технических средств, влияющих на маневренность судна (ВРШ, активные рули, подруливающие устройства, насадки и т. п.), необходимо хорошо знать их действие при маневрировании и использовать с целью повышения эффекта маневра. В определенной ситуации даже применение якорей может существенно сократить тормозной путь при расхождении иизбежатьстолкновения.
На каждом крупнотоннажном судне в соответствии с требованиями НШС—82 особое внимание должно уделяться изучению маневренных элементов судна и особенно инерционных характеристик. Все крупнотоннажные суда имеют большой тормозной путь, поэтому особое значениеприобретаюттребованияправила8 МППСС—72 о своевременности и уверенности действий. Правило 6 МППСС—72 устанавливает, что каждое судно должно всегдаследоватьсбезопаснойскоростью.
Многие крупнотоннажные суда (лайнеры, танкеры, контейнеровозы и т. п.) имеют техническую скорость 15—20 уз и более и в открытом море следуют полным ходом даже в условиях пониженной видимости. При обнаружении другого судна визуально или с помощью РЛС такая скорость значительно сокращает время и осложняет процесс расхождения. Поэтому к выбору безопасной скорости на крупнотоннажном судне надо подходить с особым вниманием и строгим выполнением требований Правила 6 МППСС—72. Напомним, что при столкновении теплохода «Стокгольм» с турбоходом «Андре Дориа» скорость их соответственно равнялась 18 и21,8 узибылапризнаначрезмерной.
Особое внимание на крупнотоннажных судах должно уделяться выполнению Правила 2 МППСС—72 и вытекающих из него требований. Следует помнить, что требования Правила2 распространяются навсеПравила
– 139 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
МППСС—72 при различных условиях плавания, в том числе при различной видимости. Вместе с тем пункт (в) этого Правила обязывает судоводителей учитывать всякого рода особые обстоятельства, грозящие столкновением, и разрешает в этих условиях отступать от правил, руководствуясь мерами хорошей морской практики для избежания опасности столкновения. Всякого рода упущения в организации вахтенной службы, использовании технических средств судовождения и маневрирования, учете особых обстоятельств плавания могут рассматриваться как нарушения Правила 2.
Так, дистанция для расхождения малотоннажных судов в 1 милю неприемлема в ряде случаев для крупнотоннажных судов. Поэтому рекомендации хорошей морской практики надо рассматривать с учетом тактикотехнических особенностей крупнотоннажных судов. Практика мореплавания показывает, что при плавании в открытом море даже на крупнотоннажных судах понижается уровень организации вахтенной службы и бдительность в наблюдениях за окружающей обстановкой.
Требования к организации вахтенной службы и контроль за ней нельзя понижать и в открытом море. В этих условиях, наоборот, целесообразно проводить тренировки судоводительского состава по расхождению судов применительно к окружающей обстановке и району плавания, изучению МППСС—72 и комментариев к ним с анализом примеров столкновений. Расхождение судов, находящихся на виду друг у друга, при встречных курсах регламентируется Правилом 14 МППСС—72; Правило 14 объединяет в себе два случая: расхождение на противоположных курсах и расхождение на почти противоположных курсах. Случай расхождения судов на противоположных курсах не вызывает никаких сомнений в толковании. В этой ситуации на судне видят ночью в створе топовые огни и бортовые огни другого судна, днем видят в створе мачты и соответствующий ракурс судна. Дальность видимости бортовых огней согласно МППСС—72 не менее 3 миль.
Своевременным, уверенным и соответствующим хорошей морской практике на крупнотоннажном судне в открытом море будет в этом случае маневр изменения курса вправо не менее чем на 20° на расстоянии от
– 140 –
УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
рис. 62 Примерырасхождениясудоввсоответствиисправилом14:
а — оба судна отворачивают вправо (суда А и В изменяют курс на А о— = 18,5º) |
|||
судно В бездействует (судно А изменяет курс |
на q=350), б -оба судна |
||
отворачивают вправо (суда А и В изменяют курс на |
q=9.5°), судно В бездействует |
||
(судно А изменяет курс на |
q=185°), в—оба судна «отворачивают вправо (суда А к |
||
Визменяюткурсна |
q=27°) |
судноВбездействует (судно А изменяет курс на q=45°) |
|
встречного судна в 3 мили с тем, чтобы разойтись ле выми бортами на дистанции не менее 1 мили (рис. 62, а). Так как в этом случае нет привилегированного судна, поворотвправосовершаютсудаАиВ.
Случаи расхождения судов на почти противоположных курсах имеют некоторую неопределенность, так как количественное значение почти противоположных курсов в МППСС—72 не приводится. Морские специалисты и судебно-арбитражная практика считают, что при острых курсовых углах у встречных судов до 8—10° может применяться термин «почти противоположные курсы». Эта величина получается как сумма угла перекрытия бортовых огней (3°), угла рыскания (2—3°), ошибок наблюдателя (1—2°) и влияния видимости, волнения и прочих субъективных и объективных причин. Таким образом, в сомнительном случае выражение «почти противоположные курсы» подразумевает сектор опасности до 10° по каждому борту, что соответствует пункту (с) правила 14 и требует расхождения судов левыми бортами (рис. 62,б).
– 141 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
Наиболее опасным будет случай, когда на почти противоположных курсах суда усматривают друг друга на курсовых углах менее 10° правого борта. Здесь поворот вправо должен быть более решительным и заблаговременным(рис. 62, в).
В рассмотренных случаях а и б на рис. 62 применение Правила 14 не вызывает сомнений ни на судне Л ни на судне В. Совершая поворот вправо, они расходятся левыми бортами. В сомнительном случае (см. рис. 62, в) оценка ситуации должна производиться согласна пункту (с) Правила 14, и изменение курса вправо на обоих судах должно быть более значительным, чем в случаях а и б (см. рис. 62). Если же курсовые углы больше 10°, расходиться следует в соответствии с Правилом 15. Во всех случаях расхождения согласно Правилу 14 следует своевременно свой маневр сопровождать звуковыми и световымисигналами, предписаннымиПравилом34.
Качественная сторона действий на судах, сближающихся противоположными или почти противоположными курсами, вытекает из Правила 14. Рассмотрим некоторые количественные соотношения для случаев, приведенныхнарис. 62.
Условия сближения: суда А и В движутся противоположными (см. рис. 62, а) или почти противоположными курсами (см рис. 62 б и в) с одинаковой скоростью Начало поворота вправо — на расстоянии 3 мили Минимальнаядистанцияприрасхождении— 1миля.
Приведенныепримерынеохватываютвсехвозможных вариантов действия Правила 14, однако они могут быть полезны в количественном выборе угла поворота при расхождениисогласноэтомуПравилу.
Принятая в примерах дистанция между судами в 3 мили, на которой суда начинают совершать маневр по расхождению, соответствует минимальной дальности видимости бортовых огней. Начало маневра на встречных курсах увязывает с дальностью видимости бортовых огней ивидныйанглийскийморскойспециалистА. Н. Кок-крофт.
С учетом инерционных свойств крупнотоннажных судов уменьшение дистанции начала расхождения будет противоречитьтребованиямПравила8 МППСС—72.
– 142 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
Для оценки ситуации сближения в зависимости от относительной скорости судов на противоположных или почти противоположных курсах можно, пользуясь табл. 31 МТ-75, выбрать величину изменения расстояния (ВИР) за 1 мин. Более просто можно выбрать время сближения судов для различной относительной скорости с дистанции между ними в 3 мили из приведенных ниже данных, которые могут быть полезны и для оценки своевременностиначаламаневра.
vуз.отн. |
50 |
40 |
32 |
30 |
28 |
26 |
24 |
22 |
20 |
18 |
16 |
14 |
1, мин |
3,6 |
4,5 |
5,6 |
6,0 |
6,4 |
6,9 |
7,5 |
8,2 |
9,0 |
10,0 |
11,2, |
12.8 |
Представляет интерес дистанция начала расхождения судов, сближающихся на противоположных или почти противоположных курсах, рекомендованная зарубежной практикой. Эта дистанция равна пятикратному расстоянию, проходимому судном по линии первоначального курса с момента начала перекладки руля на борт до момента, когда корма судна пересечет линию первоначального курса, плюс установленная дистанция расхождения между судами. Маневр, предпринимаемый согласно этой рекомендации, выполняется с рулем в крайнемположении.
В качестве примера рассмотрим следующий случай Два крупнотоннажных судна А и В сближаются на противоположных курсах с относительной скоростью 36 уз. Судно А согласно Правилу 14 производит поворот вправо, чтобы разойтись левыми бортами на расстоянии не менее 1 мили. За время перекладки руля и пересечения кормой линии первоначального курса это судно проходит по курсу 3 кб. Тогда маневр поворота судна А вправо следует начать на расстоянии до судна В не менее чем 2,5 мили (0,3X5+1=2,5).
В соответствии с Правилом 8 МППСС—72 о своевременности и уверенности действий да крупнотоннажном судне поворот вправо в данном случае следует начать на расстоянии 3—3,5 мили, чтобы убедиться в должном эффекте после его выполнения
Расхождение судов, следующих пересекающимися курсами, определяется Правилами 15, 16 и 17 МППСО— 72. В Правиле 15 указаны действия судна, которое обязано уступить дорогу другому судну. Когда два судна с механическими двигателями идут пересекающимися курсами так, что возникает опасность столкновения, то судно, которое имеет другое на своей правой стороне, должно уступить дорогу другому судну и при этом оно должно, если позволяют обстоятельства, избегать пересечениякурсадругогосуднаунегопоносу.
– 143 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
рис. 63 Схема расхождения судов |
Количественно |
|
ситуация |
|||
судов, |
следующих |
пересека- |
||||
на пересекающихся курсах(Do — |
ющимися |
курсами, |
прямым |
|||
начальное расстояние междусудами, |
образом в МППСС—72 не оп- |
|||||
м, φ° — курсовой уголс судна В на |
ределяется. |
Однако, |
как сле- |
|||
судноА; Θ° — относительный курс) |
дует из Правил 14 |
и 13, к |
||||
|
пересекающимся |
курсам |
от- |
|||
|
носятся случаи, исключающие |
|||||
|
ситуацию |
расхождения |
на |
|||
|
противоположных |
или почти |
||||
|
противоположных |
курсах |
и |
|||
|
ситуацию |
обгона. |
Отсюда |
|||
|
сектор |
применения |
Правила |
|||
|
15 для судна, уступающего |
|||||
|
дорогу, |
|
заключается |
в |
||
|
пределах от 8 до 10° правого |
|||||
|
борта |
до |
22,5° |
позади |
||
|
траверза. |
|
|
|
|
|
Правило 16 требует от судна, уступающего дорогу по Правилу 15 и по другим Правилам МППСС—72, заблаговременных и решительных действий, т. е. в известной мере повторяет требования (а) Правила 8. Правило 17 определяет действия привилегированного судна, т. етого, которому уступают дорогу. Причем оно обязано сохранять свой курс и скорость лишь в случае, если уступающее дорогу судно действует в соответствии с МППСС—72. Если же последнее не выполняет маневра, предписанного Правилами, то привилегированное судно должно предпринять действие, предотвращающее столкновение.
Рассмотрим математическую зависимость процесса расхождения судов, следующих пересекающимися курсами (рис. 63).
Суда А и В выполняют маневры: в соответствии с
Правилом 15 — судно В |
и |
в |
соответствии с |
Правилом 17—судноА |
|
t |
приращения ко- |
За малый промежуток времени |
|||
ординаты X у судов A и В будут равны |
XA=0; — ХΒ= = |
||
RBcos Θ—RBcos (Θ+ωB t), гдеRB — радиусповоротасудна В. |
|||
Послепреобразованийполучим |
|
|
|
— Хв= RB (cosΘ— cosΘ ωB |
t + sinΘ sinωB t). (130) |
||
|
|
|
|
– 144 – |
|
|
|
|
|
|
|

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
ПринимаяωB t<10°, получимcosωB t=1; sinωB t= = ωB t. Тогда
(131)
Приращение относительной координаты Y при движении судна А будет равно — YA = vA t; от перемещений судна Вравно
(132)
Послеупрощенийполучим
(133)
Общее приращение координаты X равно Х=ΔΧΑ+ + ХΒ:
(134)
Общее приращение координаты Υравно
(135) (137)
Интегрируя первое уравнение системы |
(137), по- |
лучим |
|
приt = 0 С0=Х0, тогда |
|
X = Х0 — v B t·sin Θ. |
(138) |
Аналогичноможнополучить |
|
Y = Y 0 + v B t·co s Θ - vA t , |
(139) |
Θ= Θ0 + ωB t |
(140) |
|
|
– 145 – |
|
|
|

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
Тогда относительные координаты X и Y после истечения первого промежутка времени t могут быть определеныпоформулам
(141)
Расстояние междусудами D1 поистечении первого |
|
промежуткавремени |
t будетравно |
(142)
Рассматривая п промежутков времени будем иметь
(143)
ИсходныекоординатыХ0 иYОмогутбытьопределены по измеренным величинам D0 и Θ0 из выражений
 Здесь
Здесь
(144)
Приведенные соотношения позволяют по заданным начальным условиям D0; Θ0; vA ; VB и ωв определить дистанцию кратчайшего сближения Dmin между судами А и В и время tKp, а также установить необходимый угол поворота судна В φ° = nωt, при котором обеспечивается наибольшая дистанция между маневрирующими судами. МожнотакжеполучитьвеличинуDo, прикоторой DA=0, т. е. когда поворотом судна В вправо предотвратить столкновениеневозможно Этудистанциюособенноважно знать на судне А, чтобы согласно пункту (в) Правила 17 предпринять действия для предотвращения столкновения. С учетом указанных формул составлена табл. 17 предельных значений расстояния Do между крупнотоннажными танкерами НАШ, при которых максимальный поворот вправо судна Β уже не обеспечивает расхождения судов при условии сохранения судномАсвоегокурсаискорости.
– 146 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
Таблица 17 Дистанции D0 (кб), с которых нельзя предотвратить столкновения маневрами уступающего дорогу судна, имеющего скорость vB =14 уз.
vA , уз
4
6
8
10
12
14
16
φ°,
D0 кб
φ
D0
φ
D0
φ
D0
φ
D0
φ
D0
φ
D0
φ
D0
20
Обгон
56,4
7,0
80,0
8,5
100,7
11,8
40
Обгон
33,2
7,7
45,4
8,2
58,0
9,0
70,0
10,3
80,4
119
Относительный курс Θ, °
60 |
80 |
100 |
120 |
140 |
160 |
16,5 |
16,4 |
15,0 |
12,2 |
8,5 |
4,4 |
8,6 |
9,1 |
9,6 |
10,1 |
10,4 |
10,6 |
25,3 |
24,5 |
2,1,1 |
17,0 |
11,7 |
6,0 |
8,5 |
9,5 |
10,3 |
11,0 |
11,4 |
11,6 |
34,7 |
32,0 |
27,1 |
21,0 |
14,3 |
7,2 |
9,1 |
10,3 |
11,3 |
12,0 |
12,5 |
12,7 |
43,9 |
38,8 |
32,0 |
24,5 |
16,5 |
8,3 |
9,8 |
11,1 |
12,2 |
13,1 |
13,5 |
13,7 |
52,4 |
44,8 |
36,3 |
27,5 |
18,4 |
9,2 |
10,5 |
12,0 |
13,0 |
13,7 |
14,4 |
14,6 |
60,0 |
50,0 |
40,0 |
30,0 |
20,0 |
10,0 |
11,8 |
13,0 |
14,0 |
14,7 |
15,2 |
15,5 |
66,6 |
54,4 |
43,2 |
32,2 |
21,4 |
10,7 |
12,9 |
14,0 |
15,0 |
15,8 |
16,3 |
16,5 |
|
|
|
|
|
|
Втаблицепринятыобозначения
VB — скоростькрупнотоннажного суднаВ, совершающего поворот вправо, равная 14 уз;
VA — скоростьпривилегированного суднаА, уз; Θ — относительный курс до начала маневра, °; φ — курсовойуголна привилегированноесудно, °; DO — расстояниемеждусудамиЛиВ, прикотороммаксимальный поворот судна В не обеспечивает расхождения, кб
Примерпользованиятаблицей:
Крупнотоннажный танкер В в открытом море идет со скоростью 14 уз С его правой стороны на курсовом угле, равном 36°,5 идет пересекающимся курсом судно А со скоростью 12 уз, пеленг не меняется Из таблицы видно, что дистанция расхождения DO должна быть больше 13 кб. Судно В обязано отвернуть вправо на расстоянии 3 мили, чтобы пересечь курс судна А по корме Если оно бездействует, то в соответствии с Правилом 17 судно А в расстоянии от В больше чем D0=13 кб должно резко повернуть вправо, т.е. выполнить маневр последнегомомента.
Анализируя данные таблицы, можно заключить, что при расхождении крупнотоннажных судов в открытом море пересекающимися курсами дистанцию B 3 мили между судами следует считать минимальной для выполнения начала маневра в соответствии с Правилом 15.
– 147 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
Привилегированное судно в этом случае будет следовать прежним курсом с прежней скоростью, не прибегая к маневрированию согласно Правилу17 (в). Это, однако, не освобождает его от обязанности вести наблюдение за уступающим дорогу судном до конца маневра по расхождению.
Из того же рис. 63, рассматривая маневрирование судов А и В, согласно Правилам 15, 17 (в) и (с) можно получить систему дифференциальных уравнений для случая, когда вследствие запоздалого маневра судна В выполняетманеврповоротавправоисудноА:
(145)
Решая эти уравнения, получим в итоге выражения для координат X и Y:
(146)
где Α=ωB—ωA.
Длялюбогомоментавременирасстояниемеждусудамиравно
(147)
Пользуясь полученными соотношениями, можно рассчитать дистанции Do, при которых маневр путем поворота вправо с перекладкой руля на борт на судах А
– 148 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
и 6 в соответствии с Правилами 15 и 17 (в), не приводит красхождению.
Эти предельные дистанции приведены в табл. 18 для различных условий сближения судов на пересекающихся курсах.
Таблица 18 Дистанции D0 (кб), с которых нельзя предотвратить столкновения маневрами двух судов на пересекающихсякурсах, приvB=14 уз.
vA , |
φ°, |
||
уз. |
D0 кб |
|
|
|
|||
|
|
|
|
4 |
φ |
|
|
D0 |
|
|
|
|
|
|
|
6 |
φ |
|
|
D0 |
|
|
|
|
|
|
|
8 |
φ |
|
|
D0 |
|
|
|
|
|
|
|
10 |
φ |
|
|
D0 |
|
|
|
|
|
|
|
12 |
φ |
|
|
D0 |
|
|
|
|
|
|
|
14 |
φ |
|
|
D0 |
|
|
|
|
|
|
|
16 |
φ |
|
|
D0 |
|
|
|
|
|
|
|
|
|
|
|
20
Обгон
56,4
5,9
80,0
5,8
100,7
5,7
40
Обгон
33,2
7,4
45,4
7,4
58,0
7,3
70,0
7,3
80,4
7,3
Относительный курс Θ, °
60 |
80 |
100 |
120 |
140 |
160 |
|
16,1 |
16,4 |
15,0 |
12,2 |
8,5 |
4,4 |
|
8,5 |
9,0 |
9,5 |
10,0 |
10,3 |
10,4 |
|
25,3 |
24,5 |
21,4 |
17,0 |
11,7 |
6,0 |
|
8,4 |
9,1 |
9,9 |
10,4 |
10,8 |
11,0 |
|
34,7 |
32,0 |
27,1 |
21,0 |
14,3 |
7,2 |
|
8,5 |
9,4 |
10,3 |
11,0 |
11,4 |
11,6 |
|
43,9 |
38,3 |
32,0 |
24,5 |
16,5 |
8,3 |
|
8,6 |
9,8 |
10,7 |
11,6 |
12,2 |
12,4 |
|
52,4 |
44,8 |
36,3 |
27,5 |
18,4 |
9,2 |
|
8,7 |
9,9 |
10,8 |
11,7 |
12,3 |
12,8 |
|
60,0 |
50,0 |
40,0 |
30,0 |
20,0 |
10,0 |
|
8,8 |
10,1 |
11,1 |
12,0 |
12,8 |
13,3 |
|
66,6 |
54,4 |
43,2 |
32,2 |
21,4 |
10,7 |
|
8,8 |
10,2 |
11,4 |
12,3 |
13,0 |
13,4 |
|
|
|
|
|
|
|
Сопоставляя данные табл. 17 и табл. 18 можно заключить, что маневр привилегированного судна уменьшает опасную дистанцию незначительно. При оптимальных значениях относительного курса опасная дистанция при повороте вправо привилегированного судна сокращается всего на 4—5 кб. Отсюда вытекает рекомендация при бездействии судна, обязанного уступить дорогу по Правилу 15: привилегированное судно должно начать поворот вправо на дистанции не менее 2 миль.
Примером грубого нарушения Правил 15 и 17 при пересекающихся курсах является столкновение судов А и ВвЭгейскомморе.
Судно А при хорошей видимости и безветрии следовало в Эгейском море на пути к проливу Дарданеллы (рис. 64). В 6.15 на судне А справа на курсовом угле
– 149 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
рис. 64 Схема столкно- |
30—40° и дистанции 10 миль об- |
||
наружили |
ненавигационные огни |
||
вения судов на пересека- |
судна В и приняли его за обгоня- |
||
ющихся курсах в Эгейс- |
емое. Через 15 мин открылись то- |
||
комморе |
повые огни, а спустя 5 мин — |
||
|
красный бортовой огонь судна В. |
||
|
Несмотря |
на ясную |
ситуацию |
|
сближения |
пересекающимися |
|
|
курсами и |
обязанность |
уступить |
дорогу судну В, наблюдавшемуся с правого борта, на судне А продолжали следовать прежним курсом и скоростью. В 6.39, когда дистанция между судами сократилась до 5—7 кб, судно А изменило курс влево на 20°, однако столкновенияизбежатьнеудалось.
Основныеошибкисудоводителей судна А:
1. Неудовлетворительная организация наблюдений.
2.Нарушение Правила 15. Обнаружив топовые, а затем
икрасный бортовой огонь судна В со своего правого борта, судно А обязано было произвести своевременно и решительноповоротвправо.
3.Запоздалое и неверное осуществление поворота судна А влево привело к столкновению судов почти под прямым углом. Даже в этот момент поворот вправо и полный ход назад привел бы к скользящему удару и меньшимповреждениям.
ОсновныеошибкисудоводителейсуднаВ:
1.Неудовлетворительная организация наблюдений.
2. Нарушение Правила 17, выразившееся в бездействии приугрозестолкновения.
Расхождение судов при обгоне регулируется Правилом 13 МППСС—72. Судно считается обгоняющим другое судно, когда оно подходит к нему с направления более 22,°5 позади траверза последнего, т. е. когда обгоняющее судно находится в таком положении по отношению к обгоняемому, что ночью обгоняющее судно может видеть только кормовой огонь обгоняемого судна и не может видеть ни один из его бортовых огней. Иначе говоря, обгоняющее судно находится в секторе видимости кормовогоогняобгоняемогосудна.
– 150 –
УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
При обгоне активные действия возлагаются на обгоняющее судно, которое должно держаться в стороне от обгоняемого судна. Правило 13 (с) регламентирует действия обгоняющего судна в сомнительных случаях, т. е. когда оно видит обгоняемое судно на границе освещения его кормового огня и бортовых огней. Если имеется сомнение в отношении того, является ли судно обгоняющим, то следует считать, что это именно так и действовать соответственно. Правило 13 (d) обязует обгоняющее судно держаться в стороне от обгоняемого судна пока оно не будет окончательно пройдено и оставлено позади.
В открытом море обгоняющее судно не обязано сопровождать обгон какими-либо звуковыми или световыми сигналами и выполнять его может, пересекая при необходимости курс обгоняемого судна по корме или же обогнать его на параллельном курсе с последующим пересечениемкурсаобгоняемогосуднапоносу.
Обгон может осуществляться как с правого, так и с , левого борта обгоняемого судна. Выбор того или иного способа обгона зависит отвзаимногорасположения судови соотношения их скоростей. Наименее опасным будет обгон с пересечением курса обгоняемого судна по корме (рис. 65, а и б) . Если же обгон совершается на параллельных или почти параллельных курсах с последующим пересечением курса обгоняемого судна по носу, то дистанция кратчайшего сближения должна быть в этом случае увеличена (рис. 66). Во всех ситуациях обгона рекомендуется иметь дистанцию кратчайшего сближения более 300 м, чтобы избежать явления присасывания. Для крупнотоннажного судна, если позволяют обстоятельства, дистанция кратчайшего сближения должна быть не менее 1 мили.
Обгоняемое судно должно в соответствии с пунктом (а) Правила 17 следовать своим курсом и скоростью, однако если обгоняющее судно создает опасность столкновения, то обгоняемое судно согласно Правилу 17 (а) и (в) должно предпринять такое действие, которое наилучшим образом поможет предотвратить столкновение. При неизбежности столкновения оба судна должны стремиться сделать удар скользящим, чтобы уменьшить повреждения.
– 151 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ рис. 65 Схема обгона судна по корме
рис. 66 Схемаобгонасуднапоносу
Особенностью Правила 13 МППСС—72 является его распространение на привилегированные суда по Правилу 18 (парусные суда, суда, занятые ловом рыбы и т. д.), которые, попадая в ситуацию обгоняющего судна, должны выполнять Правило 13 и держаться в сторонеот обгоняемогосуднасмеханическимдвигателем.
Основным документом, регламентирующим маневрирование судов при расхождении в условиях ограниченной видимости, являются МППСС—72, в которых опасность столкновения не имеет количественной оценки, однако, как следует из содержания Правила 19 и судебно-арбитражной практики, онапоявляется тогда,
– 152 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
рис. 67 Зоны оценки ситуации |
рис. 68 Секторы изменения |
прирасхождениисудов |
курса при расхождении судов |
когда возникает и развивается чрезмерное сближение. В зависимости от взаимных действий судов чрезмерное сближение судов ведет к опасности столкновения или угрозастолкновенияисчезает.
В Правиле 19 (d) повторяется требование Правила 8 о своевременности действий для расхождения. В условиях ограниченной видимости, и особенно на крупнотоннажном судне, такие действия должны предприниматься раньше, чем при хорошей видимости. Неопределенность поведения встречного судна и, в частности, маневр, способствующий чрезмерному сближению, должна быть своевременно обнаруженанапервомсудне.
В рекомендациях по использованию РЛС предлагается при наблюдении на 12 (15)-мильной шкале делить весь период расхождения на 3 зоны, как показано на рис. 67. При прохождении эхо-сигнала в I зоне определяются элементы движения встречного судна, расстояние и время до кратчайшего сближения. Чтобы уменьшить влияние ошибок, наблюдения надо производить в пределах всей зоны, т. е. при перемещении эхо-сигнала с 12 до 8 миль. После пересечения целью границы между I и II зонами, если возникает ситуация чрезмерного сближения, наблюдатель «проигрывает», а затем исполняет маневр на расхождение. На границе между зо-нами II и III оценивают эффект маневра и, если ситуация чрезмерного сближения продолжает развиваться, принимают дополнительные меры, чтобы избежать опасности столкновения и быть готовым к действиям согласно пункту (е) тогожеПравила19.
– 153 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
В Правиле 19 (d) указывается также, что при выборе маневра изменением курса следует избегать изменения курса влево, если встречное судно находится впереди траверза и не является обгоняемым. Следует также избегать изменения курса в направлении судна, приближающегося по траверзуили позади траверза.
Эти требования графически представлены на рис 68, где показаны секторы изменения курса «вправо» и «влево» в зависимостиоткурсовогоугла цели.
Правило 19 (е) определяет порядок действий судна, когда оно в условиях ограниченной видимости услышало туманный сигнал другого судна, по-видимому, впереди своего траверза. В этих случаях, если судно не установит, что опасность столкновения отсутствует (например, на параллельных курсах), оно обязано уменьшить свою скорость до величины, при которой хорошо еще сохраняется управляемость, и при необходимости остановить движение и затем следовать с крайней осторожностью, поканеминуетопасностьстолкновения.
Не рекомендуется изменять курс, если не определено положение и элементы движения встречного судна, направление на звуковой сигнал нельзя принимать за достоверное и по нему устанавливать положение встречного судна. Допустимо поддерживать управляемость судна, «работая машиной толчками», если не установлена опасность столкновения. Если же приближающееся судно создает угрозу столкновения и никакими действиями его избежать невозможно, то целесообразно развернуть судно носом на опасность и полностью погасить инерцию, подавая сигналы в строгом соответствии с Правилами 35 и 36.
При возникновении визуального контакта следует осуществлять подачу сигналов согласно Правилу 34. Наблюдая за эхо-сигналами встречного судна, следует сопоставлять характер его движения с подаваемыми туманными сигналами. Так, если вместо одного продолжительного звука встречное судно стало подавать два, свидетельствующих о его остановке, необходимо убедиться в этом по РЛС. В подобной ситуации следует иметь в виду, что судно может возобновить движение и быть готовым к необходимым в этом случае действиям вплоть до остановки своегодвижения.
– 154 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
Особенно важным этапом при расхождении судов является определение характера ситуации сближения. Анализ ситуации сближения производят в следующем порядке:
на основе своевременной радиолокационной информации осуществляют глазомерную оценку ситуации и выбор наиболее опасных объектов по следам послесве- ченияэхо-сигналовнаэкранеРЛС;
обрабатывают радиолокационные наблюдения путем прокладкинаманевренномилиоптическомпланшетеили с помощью средств автоматической радиолокационной прокладки(САРП);
в результате обработки радиолокационной информации определяют: курсовой угол (пеленг) объекта и дистанцчю до него, курс и скорость объекта, расположение ЛОД, дистанцию кратчайшего сближения DКР, время сближения ТКР, дистанцию и время начала маневра; кроме того, предварительно «проигрывают» маневр при ситуации, ведущей к чрезмерному сближению, и оцениваютегорезультаты;
своевременно осуществляют выбранный маневр и контролируютдальнейшеерасхождениесудов.
На судах, не имеющих средств автоматической радиолокационной прокладки, параметры сближения определяют с помощью графической прокладки относительного или истинного движения судов. Геометрическая интерпретация ситуации сближения дана на рис. 69 в относительном движении и на рис. 70 в истинном движении.
Относительная прокладка дает возможность быстро получить элементы движения встречного судна, направление ЛОД и значение DKP, однако не отражает реальной
– 155 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
рис. 70 Ситуация сближения судов в истинном движении (vB=SB/ T — скорость встречного судна; курс встречного судна В с прокладки; tD=B2D/vB — время пересечения курса; С2СП=vBtD
— положение судна С в момент пересечения курса судном В)
навигационной обстановки. Истинная прокладка при выполнении на крупномасштабной путевой карте дает полное представление о сближении судов в реальной навигационной обстановке. Вместе с тем она не дает непосредственно таких важных параметров, как DKP и tKP. Для ускорения определения параметров ситуации расхожденияразличнымиавторамипредлагалисьграфики и таблицы, составленные на основе анализа математической модели расхождения судов. Для определения направления ЛОД проф. М. М. Лесков предложил формулу
ЛОД= П+ β+ 180°, |
(148) |
где величина первого пеленга П1 снимается с индикатора РЛС, а угол β рассчитывается из выражения tg β=sin γ/F—cos γ, F = = D1/D2.
По аргументам F и γ им составлены таблицы значений
углаβизначенийDKP наоснованиисоотношения DKP=
= D1sinβ.
Проф. А. И. Родионовым получены выражения для
дистанции и времени кратчайшего сближения судов при перемещенииэхо-сигналана1милю:
DKP = КУ(D1 -1); |
(149) |
tKP= (D1 -1) t. |
(150) |
Здесь КУ — изменение курсового угла на эхо-сигнал за промежутоквремени t междудвумянаблюдениями.
Проф. А. И. Родионов рассчитал графики (рис. 71), непотерявшиесвоейпрактическойценностиивнастоящее время.
– 156 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
Исследованию времени кратчайшего сближения посвящена работа японского исследователя К. Хасегава, который по аргументам m=D2/D1 и Δα=П1—П2 составил таблицу значений tКР. На основании анализа 52 столкновений судов он сделал осредненный вывод, что для осуществления маневра на расхождение необходимо иметь запас «допустимого» времени не менее 10 мин. Однако этот вывод не может распространяться на все случаи сближения, так как ситуация расхождения зависит от относительной скорости сближения, дистанции до первого эхо-сигнала, направления ЛОД и маневренных качествсудов.
В некоторых рекомендациях для расхождения судов в открытом море считают целесообразным завершать маневрпорасхождениюнадистанциидовстречногосудна в 5 миль. Для крупнотоннажных и нефтеналивных судов эта рекомендация встречает одобрение морских специалистов и соответствует требованиям Правил 7 и 8 МППСС—72. При оценке ситуации расхождения важным признаком чрезмерного сближения будет неизменность илималоеизменениепеленгацели.
рис. 71 Схемаопределениявеличиныивременикратчайшего сближения
При определении параметров сближения необходимо учитывать влияние на них погрешностей измерения пе-
– 157 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
ленгаирасстояния. Погрешностьвизмерениирасстояния усовременных РЛС не превосходит 1% значения D. Для оценкиситуациирасхождениянаибольшуюважность представляетточностьполучениядистанциикратчайшего сближенияDКР, величиныпогрешностейвопределении которойприведенывтабл. 19.
Таблица 19 ПогрешностьmDкр вдистанциикратчайшегосближения
), |
мили |
(D |
|
2 |
|
D- |
|
1 |
|
1
2
3
Дистанция D1, мили
15 |
13 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
|
3,5 |
2,6 |
1,7 |
1,6 |
1,1 |
0,9 |
0,7 |
0,5 |
0,3 |
0,2 |
|
1,6 |
1,2 |
0,8 |
0,7 |
0,5 |
0,4 |
0,3 |
0,2 |
0,1 |
0,06 |
|
1,1 |
0,8 |
0,6 |
0,4 |
0,3 |
0,2 |
0,2 |
0,1 |
0,06 |
0,02 |
|
|
|
|
|
|
|
|
|
|
|
При наблюдении эхо-сигналов на больших дистанциях (12—15 миль) необходимо увеличивать расстояние D между эхо-сигналами до 2—3 миль и более. Точность получения Dкр надо учитывать при использовании графика нарис. 71.
Равноценными графической прокладке и взамен ее в 70-е годы для анализа ситуации расхождения судов были разработаны более совершенные методы и приборы «Альфа», «Бриз», «Енисей» и др., позволяющие определять параметры сближения судов. Общие принципы маневрирования для расхождения судов при развитии ситуации чрезмерного сближения определены в Правиле
19 (d).
Разработке рекомендаций по расхождению судов в условияхограниченнойвидимостисиспользованиемРЛС посвящен ряд работ как в СССР, так и за рубежом. Наиболее удобными для быстрых расчетов в штурманской практике можно считать табл. 20 и табл. 21, опубликованные в «Руководстве по использованию навигационных радиолокационных станций в кораблевождении». Из табл. 20 по скорости судна наблюдателя vc и времени изменения расстояния до эхо-сигнала на 1 милю выбирают скорость встречного судна vB и величину F= VB/VC. Далее по значению F и курсовомууглуцели из табл. 21 определяют вид маневра. При увеличения пеленга
– 158 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
Таблица 20 Величина F для опасно сближающихся судов
- |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
изме |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
на |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
рас |
милю |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
нения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Время |
стояния |
|
|
Скорость судна наблюдателя vc , уз |
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мин |
|
|
с |
3 |
4 |
|
5 |
6 |
7 |
8 |
9 |
10 |
12 |
|
14 |
16 |
2 |
|
|
00 |
_ |
– |
|
_ |
5,0 |
4,3 |
3,8 |
3,3 |
3,0 |
2,5 |
|
2,1 |
1,9 |
2 |
|
|
20 |
— |
— |
|
5,2 |
4,3 |
3,7 |
3,2 |
2,9 |
2,6 |
2,2 |
|
1,8 |
1,6 |
2 |
|
|
40 |
— |
5,6 |
|
4,5 |
3,8 |
3,2 |
2,8 |
2,5 |
2,3 |
1,9 |
|
1,6 |
1,4 |
3 |
|
|
00 |
— |
5,0 |
|
4,0 |
3,3 |
2,9 |
2,5 |
2,2 |
2,0 |
1,7 |
|
1,4 |
1,2 |
3 |
|
|
30 |
5,7 |
4,2 |
|
3,4 |
2,8 |
2,4 |
2,1 |
1,9 |
1,7 |
1,4 |
|
1,2 |
0,8 |
4 |
|
|
00 |
5,0 |
3,8 |
|
3,0 |
2,5 |
2,1 |
1,9 |
1,7 |
1,5 |
1,3 |
|
1,1 |
0,8 |
4 |
|
|
30 |
4,4 |
3,3 |
|
2,7 |
2,2 |
1,9 |
1,7 |
1,5 |
1,3 |
1,1 |
|
0,9 |
0,7 |
5 |
|
|
00 |
4,0 |
3,0 |
|
2,4 |
2,0 |
1,7 |
1,5 |
1,3 |
1,2 |
1,0 |
|
0,8 |
0,7 |
6 |
|
|
00 |
3,3 |
2,5 |
|
2,0 |
1,7 |
1,4 |
1,2 |
1,1 |
l,0 |
0,9 |
|
0,7 |
0,6 |
7 |
|
|
00 |
2,8 |
2,1 |
|
1,7 |
1,4 |
1,2 |
1,1 |
0,9 |
0,9 |
0,7 |
|
0,6 |
0,5 |
8 |
|
|
00 |
2,5 |
1,9 |
|
1,5 |
1,2 |
1,1 |
0,9 |
0,8 |
0,7 |
0,6 |
|
0,5 |
0,4 |
9 |
|
|
00 |
2,2 |
1,7 |
|
1,3 |
1,1 |
1,0 |
0,8 |
0,7 |
0,6 |
0,5 |
|
0,4 |
0,4 |
10 |
|
|
00 |
2,0 |
1,5 |
|
1,2 |
1,0 |
0,9 |
0,8 |
0,7 |
0,6 |
0,5 |
|
0,4 |
0,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
встреч |
|
|
, |
|
|
|
B |
|
v |
|
|
ногосудна |
уз |
|
Скорость |
|
|
30
25,7
22,6
20,0
17,1
15,0
13,3
12,0
10,0
8,6
7,5
6,7
6,0
Таблица 21 Маневр судна при опасном сближении. Поворот должен быть выполнен прежде, чем суда сблизятся на 5 миль
|
|
КУ левого борта |
|
|
КУ правого борта |
|
|
|||||||||||
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
90 |
75 |
|
60 |
45 |
30 |
15 |
0 |
15 |
30 |
|
45 |
60 |
70 |
|
80 |
90 |
||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5 |
— |
— |
|
20 |
15 |
15 |
15 |
15 |
15 |
20 |
|
25 |
35 |
45 |
|
50 |
70 |
0,5 |
6,7 |
— |
— |
|
25 |
20 |
20 |
20 |
20 |
20 |
20 |
|
30 |
40 |
50 |
|
65 |
80 |
0,7 |
1,0 |
— |
— |
|
— |
30 |
25 |
25 |
25 |
30 |
30 |
|
40 |
50 |
60 |
|
70 |
85 |
1,0 |
1,2 |
— |
— |
|
— |
40 |
30 |
30 |
30 |
30 |
35 |
|
35 |
55 |
65 |
|
80 |
90 |
1,2 |
1,5 |
— |
— |
|
— |
55 |
40 |
40 |
40 |
40 |
40 |
|
50 |
65 |
75 |
|
85 |
50 |
1,5 |
1,8 |
— |
— |
— |
— |
50 |
45 |
45 |
45 |
50 |
|
60 |
70 |
80 |
|
90 |
55 |
1,8 |
|
2,0 |
— |
— |
— |
— |
65 |
50 |
50 |
50 |
55 |
|
65 |
75 |
90 |
|
70 |
60 |
2,0 |
|
2,2 |
— |
— |
— |
— |
— |
60 |
55 |
60 |
65 |
|
70 |
85 |
85 |
|
75 |
70 |
2,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2,5 |
— |
— |
— |
— |
— |
70 |
65 |
65 |
70 |
|
75 |
90 |
90 |
|
80 |
75 |
2,5 |
|
2,8 |
— |
— |
— |
— |
— |
90 |
75 |
70 |
75 |
|
85 |
95 |
95 |
|
90 |
80 |
2,8 |
|
3,0 |
— |
— |
— |
— |
— |
— |
85 |
60 |
85 |
|
90 |
100 |
100 |
|
95 |
90 |
3,0 |
|
3,2 |
— |
— |
— |
— |
— |
— |
95 |
85 |
90 |
|
100 |
100 |
105 |
100 |
95 |
3,2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поворотвправо |
|
|
|
Поворотвлево |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– 159 –
УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
эхо-сигнала к величине F необходимо прибавить 0,5. Величина изменения курса для каждой ситуации, приведенная в табл. 21, соответствует оптимальному варианту. После окончания маневра во всех случаях необходимо осуществить контроль за дальнейшим расхождением судов. Дополнительная графическая прокладка в этомслучаеисключается.
Новым этапом вразвитиирадиолокационных средств, «обеспечивающих автоматическое определение параметров сближения, является специализированный радиолокационный индикатор «Бриз-Е», выполненный в виде пульта консольного типа, который может работать с РЛС «Океан», «Наяда», «Енисей» в 3- и 10-сантимет- ровом диапазонах. На экране индикатора отражается графическая и цифровая информация, выданная ЦВМ в результате обработки данных от РЛС на шкалах 16 или 4,8 миль. На индикаторе можно сопровождать до 20 целей одновременно. Автоматическая обработка данных от РЛС с помощью ЦВМ обеспечивает получение следующихпараметровсопровождаемыхцелей(рис. 72):
вычисление курсов и скоростей в относительном и
истинномдвижении; вычисление расстояния ивременикратчайшего сближения;
вычислениеэкстраполированных данных ситуации расхождения при «проигрывании» маневра изменением курса«вправо» или«влево»;
рис. 72 Форма индикации |
1 |
— кольцо сопровождения на не- |
||||||
графических |
элементов |
и |
подвижной |
цели, |
2 — |
кольцо сопро- |
||
цифровых |
данных вторичной |
вождения на подвижной цели с вектором |
||||||
истинного движения, 3 — маркер на |
||||||||
информации на индикаторе «Бриз- |
кольце сопровождения подвижной цели, |
|||||||
Е» |
|
|
4 — цель взята на сопровождение, но ее |
|||||
|
|
параметры еще не выработаны, 5 — |
||||||
|
|
|
время прогноза; 6 |
— пеленг на цель, 7 — |
||||
|
|
|
дистанция до цели, 8 — курс цели, 9 — |
|||||
|
|
|
скорость |
цели, |
10 |
— |
дистанция |
|
|
|
|
кратчайшего сближения, |
11 — |
время до |
|||
|
|
|
точки кратчайшего сближения; |
12 — курс |
||||
|
|
|
и скорость собственного судна; 13 — |
|||||
|
|
|
кольцо собственного судна С вектором |
|||||
|
|
|
истинногодвижения |
|
|
|||
– 160 –
УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
выработка данных для индикации вторичной информациина экране посопровождаемым целям.
Над экраном индикатора размещено световое табло, на котором отражаются параметры работы РЛС: ориентация, шкала, режим воспроизведения движения (ЛОД или ЛИД), заданные значения DКР и TКР, время задержки на выполнение маневра. Параметры движения обекта вырабатываются через 1 мин после начала сопровождения. Через 2 мин точность их достигает максимума. Так, за t=2 минDKP≈0,2 мили.
Наиболее совершенной для решения задач расхождения судов является автоматизированная РЛС «Океан-С», которая, как и комплексы «Бриз-1», «Бриз-Е», оборудована системой автоматической радиолокационной прокладки (САРП). Система позволяет одновременно оценивать как относительное, так и истинное перемещение до57 целейна шкалахот1до32 миль.
Символ сопровождаемой цели на экране имеет форму кораблика и электронную линию, представляющую собой вектор экстраполированного относительного (ЛОД) или истинного (ЛИД) перемещения цели. Одновременно производится независимая цифровая обработка информации о параметрах движения цели, результаты которой отражаются на специальном световом табло и на формуляре, расположенном на экране индикатора.
По заданным значениям DКР и TКР автоматически анализируется опасность столкновения с любой из автосопровождаемых целей. Опасность сигнализируется зуммером и световым миганием цели и ее вектора. Система позволяет «проигрывать» маневр изменением курса и (или) снижением скорости. Названные системы полностью соответствуют требованиям дополнения к Конвенции по охране человеческой жизни на море (СОЛАС— 74), облегчают действия судоводителей по оценке ситуации расхождения и способствуют повышению безопасностимореплавания.
Опытэксплуатациисистем, имеющих средства автоматической радиолокационной прокладки, на ряде крупнотоннажных судов НМП показал их высокие эксплуатационные качества, способствующие автоматизациипроцесса расхождения судов.
– 161 –

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
§15 Анализ характерной аварии крупнотоннажного танкерав открытомморе
В качестве характерной аварии крупнотоннажного танкера в открытом море рассмотрим столкновение теплохода «Новороссийский партизан» с американской баржей «Интермак-600» в Северном море. 13 марта 1978 г. танкер «Новороссийский партизан», имея на борту около 35 тыс. т сырой нефти следовал в Северном море из порта Вентспилс в порт Антверпен. В 00.00 14 марта на вахту заступил второй помощник капитана. Курс судна был 213°, поправка гирокомпаса ( + 7°) (рис. 73), скорость 16 уз, сила ветра ЮЮЗ 5 баллов, волнение 3—4 балла, видимость около 7—8 миль. Судно управлялось авторулевым.
В 01.13 вахтенный помощник дал команду перевести машину в |
||||||||||
маневренный режим в связи с периодически выпадающими осад- |
|
|||||||||
ками и ухудшением видимости примерно до 5 миль. Около 01.30 |
||||||||||
вахтенный помощник обнаружил визуально слева по носу скопление |
||||||||||
оранжевыхогней. |
|
|
|
|
|
|
|
|
|
|
В 01.41 был взят пеленг на огни (ГКП=193°). Не делая попыток |
||||||||||
определить по РЛС элементы движения обнаруженного объекта и даже |
||||||||||
расстояния до него, второй помощник поручил вахтенному матросу |
||||||||||
наблюдать за огнями и брать периодически их пеленги. |
|
|
|
|
||||||
В 01.45 ГКП на огни был равен 195°, в 01.48—197°. При взятии |
||||||||||
пеленга в 01.48 матрос над оранжевыми огнями обнаружил |
|
|||||||||
белый и под ним зеленый огни, о чем тут же доложил второму |
||||||||||
помощнику. Отдав команду матросу перейти на ручное управление, |
||||||||||
второйпомощникнепредпринялникакихдействийпорасхождению |
|
|||||||||
самостоятельно и не доложил о наличии встречного судна капитану, |
||||||||||
полагая, чтоизменениепеленгадостаточнодлячистогорасхождения. |
||||||||||
В 01.56 вахтенным в непосредственной близости слева на курсовом |
||||||||||
|
|
углу около 6° был обнаружен |
||||||||
рис. 73 |
Схема |
зеленый |
|
бортовой |
огонь, |
при- |
||||
столкновения надлежавший |
барже |
«Иитермак- |
||||||||
теплохода |
«Новороссийский 600», буксируемой впереди идущим |
|||||||||
партизан» с баржей |
«Интер-мак- судном — буксиром «Captain Andy», |
|||||||||
600» |
|
шедшим ИК-300º. Отданная в этот |
||||||||
|
момент |
команда «лево |
на борт» |
|||||||
|
|
не |
|
позволила |
|
|
избежать |
|||
|
|
столкновения, |
последовавшего |
при |
||||||
|
|
выполнении поворота влево. После |
||||||||
|
|
удара носовой частью в баржу |
||||||||
|
|
танкер в течение 7—8 мин шел |
||||||||
|
|
переменными курсами, не сбавляя |
||||||||
|
|
хода. |
|
вахтенный |
помощник |
|||||
|
|
В |
02.03 |
|||||||
|
|
доложил капитану о случившемся. |
||||||||
|
|
В |
02.11 |
судно |
легло |
на |
об- |
|||
|
|
ратный |
курс |
для |
выяснения по- |
|||||
|
|
следствий столкновения и оказа- |
||||||||
|
|
ния при необходимости соот- |
||||||||
|
|
ветствующей |
помощи |
другому |
||||||
|
|
судну. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– 162 – |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

УПРАВЛЕНИЕ КРУПНОТОННАЖНЫМИ СУДАМИ
В 03.10 к кормовой части танкера подошел буксир «Captain Andy», из переговоров с ним было установлено, что танкер столкнулся с баржей «Интермак-600», которую буксировал буксир «Captain Andy». Танкер и баржа получили значительные повреждения. После выгрузки в порту Антверпен танкер «Новороссийский, партизан» был поставлен в аварийный ремонт, стоимость, которого составила свыше 400 тыс. инв. р. Характерным для данной аварии является совокупность грубых ошибок и нарушений в действиях судоводителей обоих судов в процессе расхождения и низкая организациявахтеннойслужбы.
Наоснованииматериаловрасследованияустановлено:
на теплоходе «Новороссийский партизан» отсутствовало надлежащее визуальное и слуховое наблюдение, так же как и наблюдение с помощью всех имеющихся средств (Правило 5 МППСС—72). С ухудшением видимости не был выставлен впередсмотрящий, не было доложено капитану об ухудшении видимости и обнаружении встречного судна, не велось наблюдение с помощью РЛС;
недооценена опасность столкновения при малом изменении пеленга (Правило7 МППСС);
не использовалась РЛС для определения элементов движения цели и наличия буксируемогообъекта (Правило7 МППСС);
допущено чрезмерное сближение с судном, уступающим дорогу на пересекающихся курсах, и не принято никаких действий для предотвращения столкновения (Правило17); не применены звуковые и световые сигналы (Правило34).
Эти основные нарушения МППСС—72 свидетельствуют о слабой организации штурманской службы на танкере, невыполнении многих требований Устава службы на судах Министерства морского флота СССР
и НШС—77.
На буксире «Captain Andy»:
отсутствовалонадлежащее наблюдение (Правило5); неправильноосвещен буксируемый объект (Правила 22 и 24);
не выполнены действия по привлечению внимания встречного судна (Правило36);
было нарушено Правило 15, по которому буксир «Captain. Andy» должен был уступить дорогутанкеру«Новороссийский партизан»;
не были приняты заблаговременные действия для устранения угрозы столкновения (Правило7).
Нарушения на буксире «Captain Andy» также свидетельствуют о низкой организации штурманской службы, которой при осуществлении буксировки должноуделяться особое внимание.
– 163 –