

2_kurs / Рудакова (Сигналы и Моделирование) / YP_MEP / УЧЕБНОЕ_ПОСОБИЕ / Раздел7_2
.doc7.2. Программа комплексного анализа структурных схем
7.2.1. Общие сведения о программе KASPER
Программа KASPER предназначена для комплексного анализа структурных схем в передаточных функциях. Вопросы преобразования структурных схем решаются в области изображений, а переход от изображения к оригиналу (обратное преобразование Лапласа) выполняется автоматически с построением графиков во временной и частотной областях. Основным достоинством программы является получение аналитического описания динамических процессов, происходящих в системе /18, 19/.
Ниже приведены основные возможности программы КАSPER:
1. Ввод структурной схемы объекта САУ в удобной для оператора форме.
2. Автоматическое преобразование схемы в таблицу соединений передаточных функций и ее просмотр.
3. Хранение отдельных передаточных функций на диске с целью доступа, сохранения, редактирования и их повторного использования.
4. Исследование поведения системы при подаче нескольких входных воздействий на различные входы системы.
5. Анализ прохождения и преобразования сигнала в системе путем установки нескольких промежуточных выходов.
6. Анализ поведения системы при ненулевых условиях путем установки дополнительных входов.
7. Автоматическое анализирование сложных структурных схем путем нахождения эквивалентных звеньев при последовательном, параллельном соединении звеньев, охвате обратной связью, переносе узла и сумматора через звено, как по ходу сигнала, так и в обратном направлении, а также переносе узла через сумматор.
8. Получение результатов в виде передаточных функций для каждого выхода при произвольном входном сигнале одновременно на нескольких входах.
9. Получение частотных (амплитудной и фазовой) и временных (переходной) характеристик исследуемых объектов по результирующей передаточной функции.
10. Запись на диск после анализа результирующей передаточной функции для последующего использования (в качестве исходной передаточной функции) или для более глубокого ее анализа с выводом результатов на печать с помощью программы dinprf или аналогичных.
11. Просмотр результирующих графиков на одном экране с целью их сравнения.
12. Изменение структурной схемы или (и) исходных данных (передаточных функций).
13. Возможность использования программы в программных комплексах для анализа динамических свойств ранее введенной структурной схемы системы автоматического управления (САУ), параметры которой заложены в прикладной программе.
7.2.2. Математические методы, применяемые в программе
Преобразование структурных схем.
В основу преобразования структурных схем положены методы преобразования, реализуемые в теории автоматического управления /6/.
Непосредственному расчету промежуточных и эквивалентной передаточных функций САУ предшествует анализ структурной схемы и представление последней в виде графа системы управления, формирующего основную таблицу расчета, в которой указываются элементы структурной схемы и порядок их соединения.
В процессе анализа происходит последовательная обработка таблицы расчета при заданных конкретных передаточных функциях. При этом после поиска одного из следующих соединений: последовательное, согласное, обратная связь, перенос узла и сумматора через передаточную функцию, перенос узла через сумматор происходит вычисление эквивалентного звена и коррекция таблицы расчета. В случае получения промежуточной передаточной функции эквивалентного звена выше девятнадцатого порядка происходит автоматическое определение корней и полюсов методом Лина /5/ с последующим понижением порядка передаточной функции.
Анализ эквивалентной передаточной функции.
Анализ полученных передаточных функций возможно проводить в частотных (амплитудной АЧХ и фазовой ФЧХ характеристик) и временной (переходные характеристики) областях.
Расчет частотных характеристик АЧХ и ФЧХ основан на замене в передаточной функции (1.18) оператора p на jw и расчете амплитудно-фазовой характеристики.
Расчет переходного процесса заключается в обратном преобразовании Лапласа функции W(p)/p.
7.2.3. Построение программы, входные и выходные данные
В результате диалогового режима с оператором программа организует и записывает на диск выходные данные, которые могут быть использованы для возобновления работы. Поэтому входные и выходные данные организованы одинаково и могут храниться в файлах с расширениями:
ctc структурная схема во внутреннем формате;
ott основная таблица типов;
prf передаточная функция.
Кодирование информации выполняется программой автоматически. Следует отметить, что по объему файлов можно судить об объеме схемы ctc, о числе полей таблицы ott, о порядке передаточной функции prf.
7.2.4. Описание логической структуры программы
В связи с большим объемом программы при ее создании возникла необходимость разбиения на несколько модулей с целью достижения наглядности и упрощения отладки.
Модули общего применения могут быть использованы в различного рода программах.
Модули специального применения разработаны непосредственно для программы KASPER и выполняют следующие функции (табл. 7.2).
Таблица 7.2
|
Модуль |
Назначение |
|
EDITCX |
Редактор структурных схем и создание таблицы расчета |
|
RUNCX |
Вычисление эквивалентной передаточной функции по таблице расчета |
|
UTISIN |
Подготовка таблицы расчета для RUNCX и анализ результирующих передаточных функций |
|
SQRPOLIN |
Нахождение корней многочлена n-го порядка, расчет формулы переходного процесса, функции расчета переходного процесса и частотных характеристик |
На рис.7.4 показаны блоки программы в порядке проведения анализа динамических свойств объекта управления.
Выбор необходимого при анализе блока производится оператором через меню. Все связанные с оператором блоки имеют выход в меню.
7.2.5. Выполнение программы
После загрузки и запуска программы вызывается редактор структурных схем, который выводит на экран рабочую структурную схему, если она была ранее набрана и записана на диск, и позволяет ее изменять синхронно в ОЗУ и на мониторе. В противном случае оператор набирает структурную схему и, при необходимости, редактирует ее.
По завершении редактирования в соответствии с рис.7.4 вызывается анализатор структуры схемы. Он, используя графическую информацию структурной схемы в ОЗУ, преобразует ее в основную таблицу расчета с целью выявления смысловой нагрузки.
П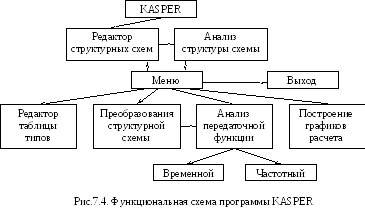 рограмма
контролирует ошибки, возникающие в
процессе анализа структуры схемы. При
обнаружении ошибки оператору выдается
соответствующее сообщение.
рограмма
контролирует ошибки, возникающие в
процессе анализа структуры схемы. При
обнаружении ошибки оператору выдается
соответствующее сообщение.
По завершению анализа структурной схемы программа выходит в меню и оператору предлагается заполнить поля таблицы типа формирования передаточных функций, которая содержит идентификаторы элементов, переписанные из таблицы расчета и методы их получения. Обычно эта загрузка передаточной функции выполняется с диска, поэтому редактор таблицы типов содержит дисковый монитор передаточных функций. При отсутствии на диске таких данных оператор для каждого звена согласно его идентификатору на структурной схеме вводит заданную передаточную функцию, после чего начинается процесс преобразования структурной схемы до получения результирующей передаточной функции с последующим определением корней её числителя и знаменателя.
Передаточная функция для каждого выхода записывается в таблицу результатов анализа.
Для выбранных пользователем выходов может быть произведен расчет переходного процесса и частотный анализ.
При исследовании системы с ненулевыми начальными условиями предлагается использовать входные воздействия. Например, для апериодического звена первого порядка начальные условия представляют в виде

После расчета частотных и переходных характеристик возможно построение графиков, что обеспечивает наглядность процессов, проходящих в системе. Следует отметить, что программа выбирает оптимальный масштаб для графиков, позволяя оператору сосредоточиться на выводимой информации. Кроме того, предусмотрен вывод графиков по два на мониторе, что дает возможность сравнения графиков, выявления связи переходной и частотных характеристик, а также проводить анализ прохождения сигнала в структурной схеме.
Существует возможность использования программы KASPER в программных комплексах, для чего имеется связь через внешние файлы со всеми необходимыми для расчета данными.
Применение программы представлено в примере 7.1.
Пример 7.1. Основные возможности программы проиллюстрируем на системе тиристорный преобразователь двигатель постоянного тока с управлением скоростью привода напряжением питания двигателя при неизменном потоке возбуждения. Механическая часть представлена в виде двухмассовой упругой механической системы. Разомкнутая система описывается системой дифференциальных уравнений (7.1).
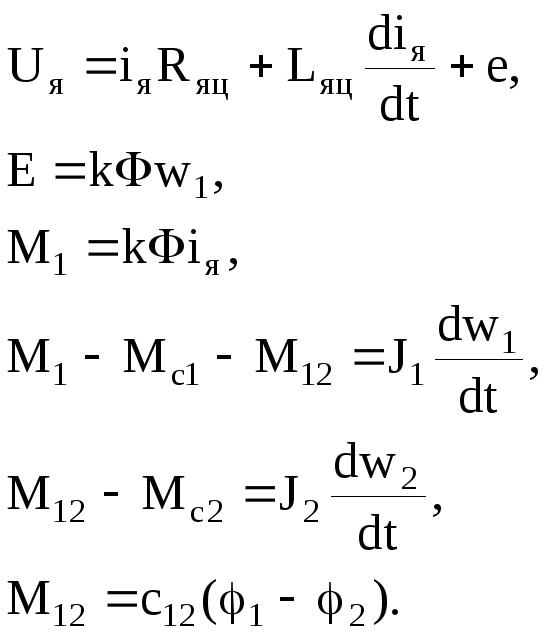 (7.1)
(7.1)
Применив к уравнениям (7.1) преобразование Лапласа, составляется структурная схема, изображенная на рис.7.5.
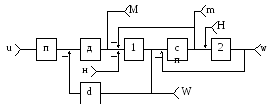
Рис.7.5. Пример ввода в ЭВМ исследуемой структурной схемы
Передаточные функции звеньев, представленных на рис.7.5, следующие:
![]() тиристорный
преобразователь;
тиристорный
преобразователь;
![]() двигатель;
двигатель;
![]() первая
масса;
первая
масса;
![]() упругая
механическая связь;
упругая
механическая связь;
![]() вторая
масса;
вторая
масса;
![]() коэффициент
передачи двигателя.
коэффициент
передачи двигателя.
По приведенной структурной схеме программа автоматически нумерует сумматоры и узлы и заполняет основную таблицу расчета, которая представлена на рис.7.6.
Для проведения анализа структурной схемы необходимо заполнить таблицу типов получения передаточных функций с помощью дискового монитора передаточных функций рис.7.7. Из таблицы расчета поля с передаточными функциями, автоматически переносятся в таблицу типов.
Передаточная функция связывается с файлом на магнитном диске. После редактирования коэффициентов происходит автоматическая запись передаточной функции.
По окончании заполнения всех полей таблицы типов производится анализ структуры системы и определяются результирующие передаточные функции, о чем свидетельствует появление окна расчета (рис.7.8).
Примечание: Основная таблица
В
ФУН ВХОД ВЫХОД u У0 У1 п У1 С1 д С1 У2 М У2 У2 0 С2 1 С2 У3 d У3 -1 W У3 У3 0 С3 c С3 У4 m У4 У4 У4 0 -2 С4 2 С4 У5 У5 -3 w У5 0 н У0 -2 Н У0 -4 Рис.7.6. Таблица
расчета
Передаточная функция п (преобразователь) подключена входом к узлу У1,а выходом к сумматору С1.
Передаточная функция д (двигатель) подключена входом к сумматору С1, а выходом к узлу У2.
Выход М (момент двигателя) соединен с узлом У2.
Узел У2 соединен с сумматором С2.
Передаточная функция 1 (первая масса) подключена входом к сумматору С2, а выходом к узлу У3.
Передаточная функция d (кд) подключена входом к узлу У1, а выходом к сумматору С1 с отрицательным знаком.
Выход w (частота вращения вала двигателя) соединен с узлом У5.
Узел У3 соединен с сумматором С3.
Передаточная функция с (жесткая связь масс) подключена входом к сумматору С3, а выходом к узлу У4.
Выход m (момент упругой деформации) соединен с узлом У4.
Узел У4 соединен с сумматором С2 с отрицательным знаком.
Узел У4 соединен с сумматором С4.
Передаточная функция 2 (вторая масса) подключена входом к сумматору С4, а выходом к узлу У5.
Узел У5 соединен с сумматором С3 с отрицательным знаком.
Выход w (частота вращения рабочего органа) соединен с узлом У5.
Вход н (момент нагрузки первой массы) поступает на сумматор С2 с отрицательным знаком.
Вход Н (момент нагрузки второй массы) поступает на сумматор С4 с отрицательным знаком.
Просмотр результирующих передаточных функций, а также построение частотных и временных характеристик проводится оператором в диалоговом режиме (рис.7.9).
Для выхода двигателя на номинальную частоту вращения подадим сигнал задания u=7 B. Результаты исследования динамики системы по управлению приведены в табл.7.3.
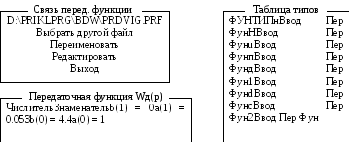
Рис.7.7. Формирование таблицы типов

Рис.7.8. Окно расчета
Рис.7.9. Выбор рассчитываемых характеристик
Просмотр просчитанных графиков производится путем выбора номеров характеристик (рис.7.10).
Выбраны графики 1, 5, 6 (рис.7.10), представляющие переходную h(t), амплитудно-частотную A() и фазочастотную () характеристики момента двигателя (рис.7.11).
Таблица 7.3
|
Передаточная функция |
Переходный процесс |
|
|
числитель |
знаменатель |
|
|
Частота вращения рабочего органа |
||
|
|
a6 = 1 |
|
|
|
a5 = 282 |
164.486 + |
|
|
a4 = 21900 |
1.1 10-14 e-161t + |
|
|
a3 = 4.36 105 |
0.0057 e-100t + |
|
b2 = 7.6 105 |
a2 = 7.44 106 |
11.07777 e-1.65t cos(17t 29.9) + |
|
b1 = 2.45 108 |
a1 = 8.53 107 |
186.421 e-1.62t |
|
b0 = 1.98 1010 |
a0 = 1.2 108 |
12.337 e-15.6t |
|
Частота вращения двигателя |
||
|
|
a5 = 1 |
164.486 + |
|
|
a4 = 120.5 |
1.4773 + e-100t + |
|
|
a3 = 2431 |
21.493 + e-1.65t cos(17t 143) + |
|
b2 = 1.22 106 |
a2 = 42830 |
191.33 + e-1.62t + |
|
b1 = 7.59 105 |
a1 = 5.23 105 |
45.4 + e-15.6t |
|
b0 = 1.23 108 |
a0 = 7.46 105 |
|
|
Момент упругой деформации |
||
|
|
a5 = 1 |
|
|
|
a4 = 120.5 |
1.41277 + e-100t + |
|
|
a3 = 2431 |
475.218 + e-1.65t cos(17t 234) + |
|
b2 = 1.9 106 |
a2 = 42830 |
755.839 + e-1.62t + |
|
b1 = 3.07 108 |
a1 = 5.23 105 |
481.8 + e-15.6t |
|
b0 = 0 |
a0 = 7.46 105 |
|
|
Момент двигателя |
||
|
|
a5 = 1 |
|
|
|
a4 = 120.5 |
220.052 + e-100t + |
|
b3 = 1.8 10 |
a3 = 2431 |
97.067 + e-1.65t cos(17t 7.4) + |
|
b2 = 3.02 106 |
a2 = 42830 |
1215.09 + e-1.62t + |
|
b1 = 4.88 105 |
a1 = 5.23 105 |
1531.4 + e-15.6t |
|
b0 = 0 |
a0 = 7.46 105 |
|
Рис.7.10. Выбор выводимых графиков
a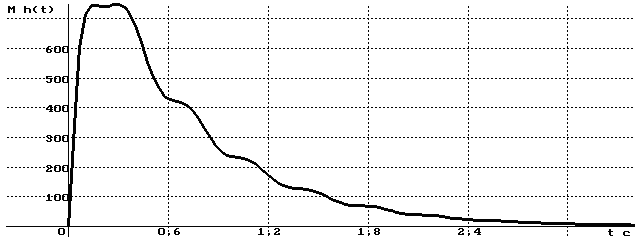 )
)
б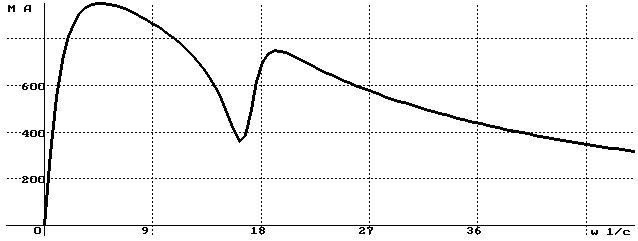 )
)
в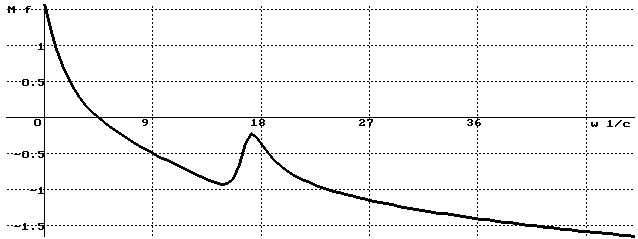 )
)
Рис.7.11. Переходная (а), амплитудно-частотная (б) и фазочастотная (в) характеристики момента двигателя