

2_kurs / Рудакова (Сигналы и Моделирование) / YP_MEP / УЧЕБНОЕ_ПОСОБИЕ / Глава5
.doc5. МОДЕЛИРОВАНИЕ ДАТЧИКОВ В ЭЛЕКТРОПРИВОДЕ
Для введения в систему управления электрическим приводом (ЭП) необходимой информации об электрических параметрах цепей и неэлектрических величинах – параметрах движения применяют различные измерительные датчики. Наибольшее распространение в приводе получили датчики скорости, положения и тока.
5.1. Тахогенератор постоянного тока
Самым распространенным датчиком угловой скорости является тахогенератор (ТГ). В контуре скорости ЭП металлорежущих станков достаточно широко применяют ТГ постоянного тока с независимым возбуждением или с возбуждением от постоянных магнитов (рис.5.1).
В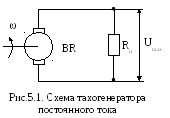 ходной
координатой ТГ (BR) является
угловая скорость ,
выходной – напряжение Uвых,
выделяемое на сопротивлении нагрузки
Rн. ЭДС ТГ Етг определяется
по формуле:
ходной
координатой ТГ (BR) является
угловая скорость ,
выходной – напряжение Uвых,
выделяемое на сопротивлении нагрузки
Rн. ЭДС ТГ Етг определяется
по формуле:
![]()
где К – конструктивная постоянная, Ф – магнитный поток, Rтг – сопротивление якорной обмотки и щеточного контакта.
Напряжение на сопротивлении нагрузки Rн рассчитывается по формуле (5.1)
![]() (5.1)
(5.1)
где
![]() -передаточный
коэффициент ТГ, Вс/рад,
который находится в пределах (0,2…0,3),
Вс/рад. Класс точности
тахогенераторов составляет (0,2…1,0).
-передаточный
коэффициент ТГ, Вс/рад,
который находится в пределах (0,2…0,3),
Вс/рад. Класс точности
тахогенераторов составляет (0,2…1,0).
При работе ТГ возникают низкочастотные оборотные и полюсные пульсации, которые составляют (0,25…1) % выходного напряжения. Это вызывает неравномерность вращения ЭП и ограничивает нижний предел скорости ТГ. Поэтому тахогенераторы высокой точности выполняются с полым беспазовым якорем. В ряде случаев для дополнительного снижения пульсаций к выходу ТГ подключают конденсатор С (рис.5.2).
Динамические характеристики ТГ связаны с инерционностью электромагнитных переходных процессов, происходящих в цепи якоря (рис.5.2).
Согласно рис.5.2 можно составить математическую модель тахогенератора постоянного тока
![]() (5.2)
(5.2)
где Ттг=Lтг/Rтг – электромагнитная постоянная ТГ,с.
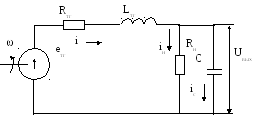
Рис.5.2. Схема замещения ТГ постоянного тока
![]() ,
(5.3)
,
(5.3)
![]() ,
(5.4)
,
(5.4)
![]()
(5.5)
(5.5)
где Тн=СRн – постоянная контура RнС, с.
Подставляя в уравнение (5.2) значения етг, iн, i, получим
![]() Rн+Uвых.
(5.6)
Rн+Uвых.
(5.6)
После преобразований оно примет вид
![]() .
.
Передаточная функция тахогенератора постоянного тока
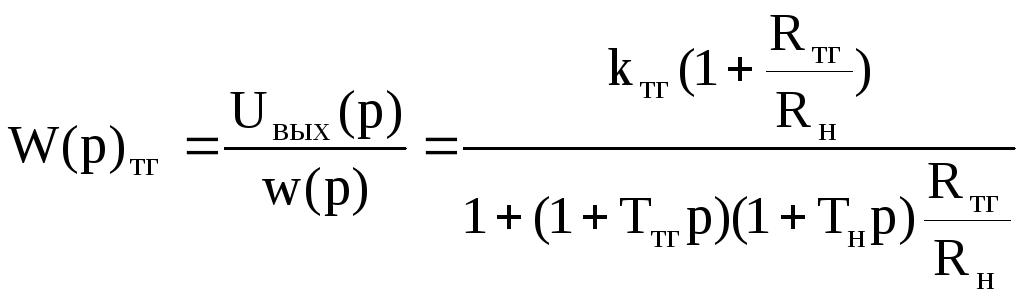 . (5.7)
. (5.7)
Постоянная времени ТГ невелика (Ттг=0.01 с) по сравнению с Тн (как минимум на порядок), поэтому для схемы с конденсатором передаточная функция датчика скорости может быть упрощена
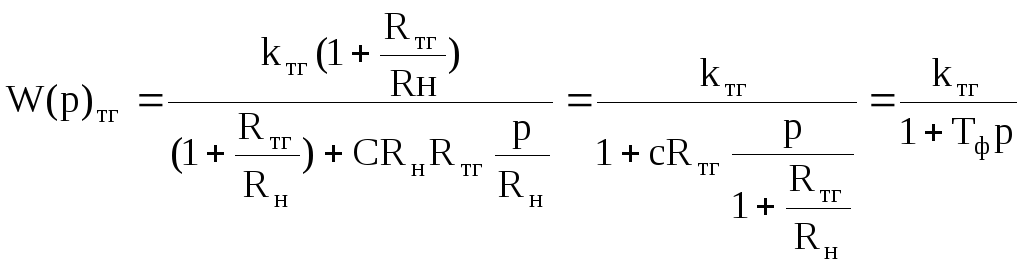 ,
(5.8)
,
(5.8)
где Тф=СRтг(1+RтгRн) – постоянная времени фильтра , с.
При отсутствии фильтра ввиду малости Ттг ТГ принимают безынерционным звеном с передаточной функцией W(p)=Kтг.
5.2. Датчики тока
Для образования токовых обратных связей находят применение датчики тока. Известны две основные системы образования токовой обратной связи по переменному току на первичной обмотке трансформатора и по постоянному току цепи якоря двигателя.
Достоинством первой системы является высокая чувствительность, однако требуются три трансформатора тока, выпрямительный мост с сглаживающим конденсатором. Во втором случае измерительное напряжение снимается с шунта Rш, включенного в цепь якоря (рис.5.3).
Применительно к серии УБСР-АИ схема работает следующим образом. Ячейка ДТ-3АИ подключается к шунту RШ и обеспечивает гальваническую развязку между входными и выходными цепями с разностью потенциалов между ними до 1000 В. Выходное напряжение датчика 10В, коэффициент усиления может изменяться от 53 до 135. Погрешность датчика не более 1 %, полоса пропускания не менее 2 кГц. Напряжение на входе (0…75) мВ, чувствительность 2 мВ, кратность измеряемых токов 1,0 … 2,5.
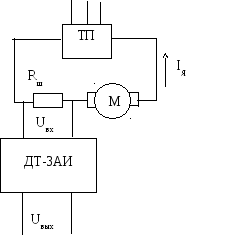
Рис.5.3. Схема включения датчика тока в цепь якоря
Для измеряемой цепи напряжение, снимаемое
с шунта датчика тока, равно
![]() .
На выходе датчика получают напряжение
.
На выходе датчика получают напряжение
![]() ,
,
где Куд – коэффициент усиления ячейки датчика тока.
Что касается передаточной функции датчика тока, то согласно его схеме /16/, он описывается апериодическим звеном, поскольку имеет разделительный трансформатор. Постоянная времени апериодического звена может быть определена из полосы пропускания wп, поскольку такая связь из теории автоматического управления известна (рис.5.4), где К – коэффициент передачи звена при нулевой частоте.
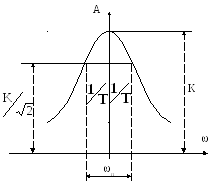
Рис.5.4. Амплитудная частотная характеристика апериодического звена
Постоянная времени вычисляется по формуле Т=2п=2(2fп).
Поскольку для нашего случая Т=0,00016 с., то датчик тока можно принять безынерционным. Тогда передаточная функция датчика тока, включающего в свой состав шунт и ячейку ДТ-ЗАИ, примет вид
![]() (5.9)
(5.9)
где Uнш – номинальное падение напряжения на сопротивлении шунта Rш при протекании тока якоря, равного номинальному току шунта Iнш.
Характеристика управления датчика тока описывается уравнением
![]() .
(5.10)
.
(5.10)
Помимо рассмотренных выше, в качестве датчиков тока могут применяться магнитные усилители (трансформаторы постоянного тока), а также датчики, выполненные на основе элементов Холла.
5.3. Датчики напряжения
Служат для преобразования входной величины – напряжения – в выходной сигнал, пропорциональный входной величине.
Наиболее простыми датчиками напряжения являются резисторные делители напряжения (рис.5.5).
a) б)
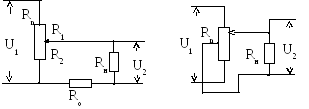
Рис.5.5. Резисторные датчики напряжения:
а) обычный делитель, где Rn, Rн – соответственно сопротивления потенциометра и нагрузки R0 – резистор, служащий для подведения дополнительного сигнала, например сигнала обратной связи для суммирования с сигналом U1;
б) показан делитель со средней точкой, позволяющей на нагрузке менять знак напряжения при переходе через нуль
Датчик напряжения характеризуется коэффициентом передачи Кдн=U2U1. Коэффициент передачи датчика напряжения Кдн зависит от соотношения параметров датчика, которые можно определить из схемы, приведенной на рис.5.6.
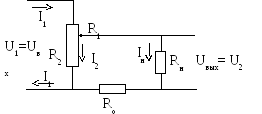
Рис.5.6. К определению коэффициента передачи датчика напряжения Кдн
Из схемы следует математическое описание датчика напряжения системой уравнений
![]()
 (5.11)
(5.11)
После подстановки в уравнение U1 значений токов I1, I2 и сопротивлений R1 и R2 оно примет вид
![]() .
(5.12)
.
(5.12)
Отсюда коэффициент передачи датчика напряжения Кдн равен
 ,
(5.13)
,
(5.13)
который после подстановки в него обозначений п=R2Rп, п=RпRн и о=RoRн и преобразований примет окончательный вид
![]() .
(5.14)
.
(5.14)
Зависимость (5.14) позволяет проанализировать влияние параметров резисторного датчика напряжения на его коэффициент передачи и вид характеристики датчика.
Линейность характеристики, следовательно, и постоянство коэффициента передачи определяется относительным значением п=RпRн, относительным перемещением движка п=R2Rп.
Из приведенных схем видно, что Кднп только в режиме холостого хода делителей при Rн и п=0.
Во всех других случаях коэффициент передачи будет зависеть от параметров схемы.
Для обычного потенциометра (рис.5.5, а)
![]() (5.15)
(5.15)
Для делителя со средней точкой (рис.5.5, б)
![]() .
(5.16)
.
(5.16)
Отклонение пропорциональности оценивается относительным показателем нелинейности Кнл=Кдн–Кдно, где Кдно=п при RнRп.
Для обычного потенциометра, при о=0
 .
(5.17)
.
(5.17)
Для делителя со средней точкой
 .
(5.18)
.
(5.18)
Максимальное напряжение на выходе датчика для обычного потенциометра, при RнRп и R2=Rп U2max=U1.
Для делителя со средней точкой при п=1:
![]() .
.
В ряде случаев, когда требуется обеспечить гальваническую развязку цепей, тогда с сигналом проводят ряд операций по схеме (рис.5.7)
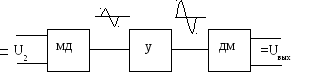
Рис.5.7. Схема датчика напряжения с гальванической развязкой:
МД – модулятор, который преобразует сигнал постоянного тока в сигнал переменного тока
У – усилитель сигнала переменного тока
ДМ – демодулятор, преобразующий сигнал переменного тока в постоянный
Осуществление подобной схемы позволяет уменьшить дрейф нуля выходной характеристики, обеспечить гальваническую развязку цепи измеряемого сигнала с цепью управляющего сигнала.
Передаточная функция датчика напряжения усложняется из-за наличия фильтров для сглаживания пульсаций, возникающих в процессе модуляции-демодуляции (5.19).
![]() (5.19)
(5.19)
где Ку – коэффициент усиления по напряжению,
Тф – постоянная времени фильтра.
Реализация указанного принципа осуществлена, например, в датчике напряжения ДН – 2АИ с техническими данными
напряжение питания 15 В;
напряжение входа 0…10 В;
напряжение выхода 0…10 В;
чувствительность 40 мВ;
полоса пропускания 2 кГц;
сопротивление нагрузки 2 кОм;
коэффициент передачи 0,6…1.
При измерении напряжения переменного тока, особенно при высоких уровнях, используются маломощные трансформаторы напряжения. Для преобразования сигнала переменного тока в постоянный применяют нулевые или мостовые схемы выпрямления, а для сглаживания пульсаций подключают фильтры (рис.5.8).
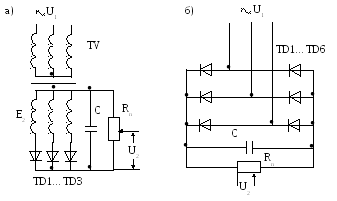
Рис.5.8. Схемы датчиков напряжения переменного тока:
а) нулевая, б) мостовая схема выпрямления
Передаточная функция датчика напряжения:
![]() ,
(5.20)
,
(5.20)
где кдн, кВ, кТ – соответственно коэффициенты делителя, выпрямителя, трансформатора.