

ТСА / Конспект лекций
.pdfмеханизм (и связанный с ним регулирующий орган) может занимать лишь два положения и скачкообразно перемещаться из одного крайнего положения в другое, когда регулируемая величина проходит через заданное значение.
Закон регулирования 2-х - позиционного регулятора имеет вид:
X |
X |
вых.max |
или X |
вых.min |
при X |
вх |
X |
з |
|
|
вых |
|
|
|
|
|
|||||
|
Xвых.min или Xвых.max при |
Xвх |
Xз |
|
||||||
|
|
|
Статическая |
|
характеристика |
регулятора |
||||
|
|
показана на рис. 4. |
|
|
|
|
|
|||
|
|
|
В |
реальных |
регуляторах |
изменение |
||||
|
|
выходного сигнала от минимального до |
||||||||
|
|
максимального значения и наоборот происходит |
||||||||
|
|
при различных значениях входной величины (рис. |
||||||||
|
|
5). Разность между значениями входной |
||||||||
|
|
величины в момент изменения выходного сигнала |
||||||||
|
|
называют |
зоной |
неоднозначности |
регулятора, |
|||||
величина которой зависит от зазоров и сил трения в регуляторе, а также обусловлена необходимостью создания определенных усилий для размыкания, например, электрических контактов.
Пример системы двухпозиционного регулирования уровня жидкости с зоной неоднозначности показан на рис. 6. В бак 1 из трубы 2 поступает вода. На трубе установлен клапан 3 (регулирующий орган), а на поверхности жидкости находится поплавок 6, который штоком 5 соединен с подвижным контактом 7. Контакт 7 при перемещении
поплавка может замыкаться на неподвижные контакты 8 и 9.
При повышении уровня воды относительно заданного значения Нз контакт 7 замкнется на контакт 8 и под напряжением окажется обмотка Б электромагнитного исполнительного механизма. Плунжер 4 втянется в обмотку Б и клапан 3 закроется. При понижении уровня контакт 7 замыкается на контакт 9, и под напряжением окажется обмотка А. Плунжер 4 втянется в эту обмотку и клапан откроется.
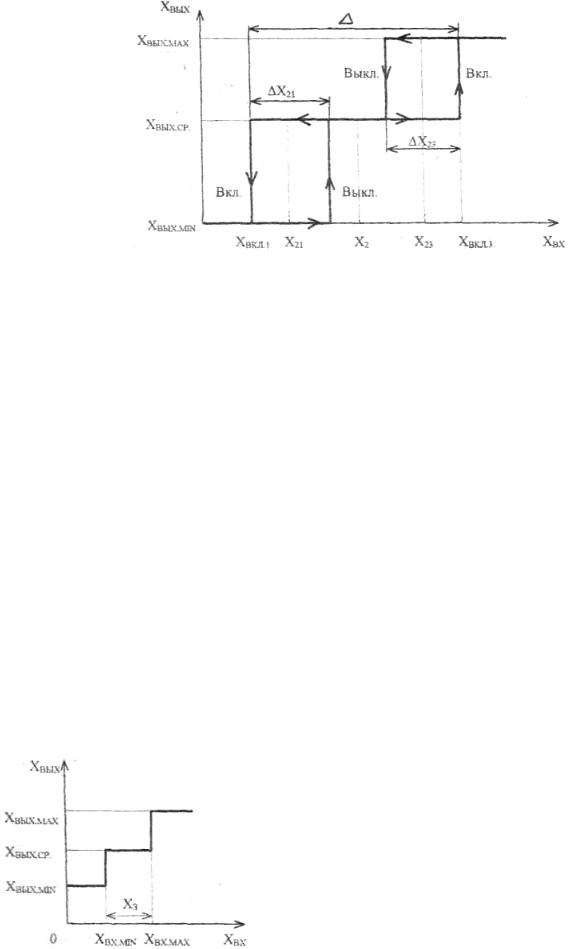
Из рис. 5 видно, что при повышении уровня выходная величина регулятора изменяется по линии 1, 6, 2, 4. Точки 2 и 3 соответствуют мгновенному перемещению клапана из открытого положения в закрытое, т.е. от ХВЫХ.МАХ до ХВЫХ.MIN, когда контакты 7 и 8 замкнуты. При падении уровня Хвых регулятора изменяется по линии, обозначенной точками 4, 5, 6, 1 Точки 5 и б соответствуют мгновенному перемещению клапана из закрытого положения в открытое при замыкании контактов 7 и 9.
11
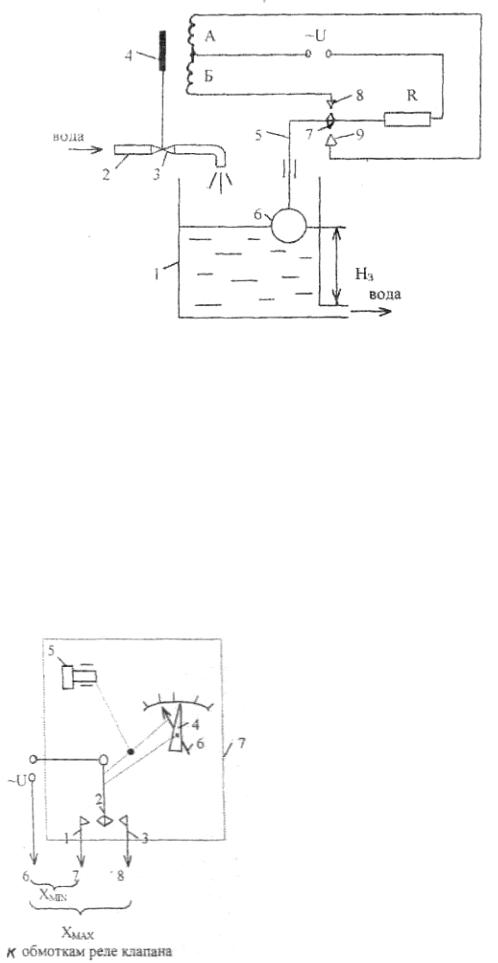
Рисунок 6
Зона неоднозначности определяется расстоянием между контактами 8 и 9. Режим работы регулятора – автоколебательный в окрестностях его
равновесного состояния. Уменьшение величины зоны нечувствительности приводит к увеличению числа переключений регулирующего органа, что снижает надежность работы системы (подгорание контактов, например). Увеличение зоны приводит к росту амплитуды колебаний, т.е. к ухудшению процесса регулирования.
Зону нечувствительности иногда называют зоной возврата и обозначают Д=2а (см рис. 5).
Закон регулирования 2-х- позиционного регулятора с зоной возврата имеет
вид:
|
|
|
|
|
|
|
|
|
|
|
Xâûõ.max |
ïðè |
Xâõ |
Xç |
|
|
|
||||
2 |
|
|||||||||
Xâûõ |
|
|
|
|
|
|
|
|
|
|
X |
|
ïðè |
X |
|
X |
|
|
|
|
|
âûõ.min |
âõ |
ç |
|
|||||||
|
|
|
|
|
|
2 |
|
|||
Ряд измерительных приборов (автоматические мосты, потенциометры и др.) оборудуются позиционными регуляторами вида рис. 7. В них подвижный контакт 2 механически связан с указателем задания 6, указателем 4 измерительного прибора 7 и рукояткой задания 5. Когда Хвх=Хз, контакт 2 находится в среднем положении и не соприкасается с контактами 1 и 3. Отклонение измеряемого параметра от заданного вызывает перемещение контакта 2 либо в сторону "Мало" (Xmin), либо в сторону
12
"Много" (ХМАХ). В случае двухпозиционного регулирования можно использовать только один неподвижный контакт При помощи рукоятки задания 5 контакт 2 устанавливают в среднее (заданное) положение. При этом указатель 6 совмещается (по шкале) с указателем 4 прибора. Зону возврата регулируют передвижением неподвижных контактов 1 и 3.
У трехпозиционных регуляторов регулирующий орган может занимать три положения: "открыто", "закрыто" и "среднее". Закон регулирования (без зоны неоднозначности) имеет вид:
|
|
Xвых.max |
при Xвх |
Xвх.max |
X |
|
|
|
Xвх Xвх.max |
вых Xвых.ср при Xвх.min |
||||
|
|
Xвых.min |
при Xвх |
Xвх.min |
|
|
|||
Статическая характеристика регулятора показана на рис. 8.
В реальных регуляторах имеются зоны нечувствительности. На примере рис. 7 рассмотрим работу реального регулятора, статическая характеристика которого приведена на рис. 9.
При увеличении Хвх указатель 4 прибора, поворачиваясь по часовой стрелке, при Хвх=Хвх.вкл.з (рис. 9) перемещается контакт 2, который замыкается с контактом 3. Ток будет проходить по цепи 8-3-2-6, и эл/магнит, включенный в эту цепь, полностью откроет клапан. При уменьшении Хвх на величину зоны Х23 контакт 3 разомкнётся, регулирующий орган займет среднее положение. При дальнейшем уменьшении Хвх, когда Хвх станет равным Хвкл.1 , контакт 2 замкнется на контакт 1, ток будет проходить по цепи 7-1-2-6 и исполнительный механизм полностью
закроет клапан на водопроводе.
При увеличении Хвх на величину зоныХ21 обе цепи окажутся разомкнутыми и регулирующий орган снова займет среднее положение. При возрастании Хвх до Хвкл.з значение Хвых станет равным Хвых.ср. При Хвх=Хвкл.з выходная величина скачком принимает значение Xвых.max которое остается постоянным до тех пор, пока Хвх>(Хвкл.з- Х23).
13
Как только Хвх=(Хвкл.з- Х23), выходная величина скачком уменьшается до Хвых.ср. При дальнейшем уменьшении Хвх до Хвх=Хвкл.1 выходная величина не изменяется. Только при Хвх=Хвкл.1 она скачком принимает значение Хвых.min, которое остается постоянным при Xвх<Xвкл.1.
При изменении Хвх в сторону увеличения выходная величина скачком
принимает среднее значение Хвых.ср при Xвх=Xвкл.1+ X21.
Из рассмотренного принципа действия следует, что 3х-позиционные регуляторы имеют устойчивое состояние Хвых=Хвых.ср в окрестностях равновесного состояния системы (Хвх=Х2), определяемых значениями зон нечувствительности и неоднозначности статической характеристики. В этом заключается принципиальное отличие 3х-позиционных регуляторов от 2х-позиционных.
Закон регулирования реального 3х-позиционного регулятора имеет вид:
|
|
|
|
|
Xвых.max |
|
|
|
|
|
Xвх |
Xвкл.3 |
|
|
|
|
|||
|
|
|
|
|
при |
|
|
X23 Xвх |
Xвкл.3 |
|
|
||||||||
|
|
|
|
|
|
|
|
Xвкл.3 |
|
|
|||||||||
|
|
|
|
|
|
|
|
Xвкл.1 |
Xвх Xвкл.3 X21 |
|
|
||||||||
X |
|
|
|
X |
|
при |
|
|
X |
|
X |
|
X |
|
X |
|
|
||
вых |
|
вых.ср |
X |
вкл.1 |
21 |
вх |
вкл.3 |
23 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
Xвкл.3 |
X23 Xвх |
Xвкл.3 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
Xвых.min |
|
|
|
|
|
Xвх |
Xвкл.1 |
|
|
|
|
|||
|
|
|
|
|
при |
|
Xвх |
Xвкл.1 |
X21 |
|
|
||||||||
|
|
|
|
|
|
|
|
Xвкл.1 |
|
|
|||||||||
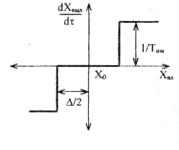
4 Релейные регуляторы с постоянной скоростью перемещения исполнительного механизма.
Работу регулятора поясним по его статической характеристики (рис. 4.1)
Рисунок 4.1
При значении регулируемой величины Хвх < (Х0 – /2) или Хвх > (Х0 + /2) ИМ включен и с максимальной скоростью перемещает регулирующий орган в одном из двух направлений, обеспечивающих соответственно увеличение или уменьшение Хвх. В пределах зоны нечувствительности регулятор не реагирует на величину и направление изменения сигнала ошибки. Из одного крайнего положения в другое ИМ перемещается за время Тим, которое называют временем полного хода ИМ. Величину, обратную Тим, называют максимальным значением скорости 1/Тим. Эта величина и зона нечувствительности являются параметрами настройки регулятора.
14
На практике формирование рассмотренного закона регулирования осуществляется электрическими позиционными устройствами, описанными в предыдущей лекции. Принципиальное отличие релейных регуляторов с постоянной скоростью ИМ от ранее рассмотренных 2-х и 3-х позиционных регуляторов заключается в том, что в первых из них контактное позиционное устройство включает не эл/магнитный релейный ИМ, а работает в комплекте с ИМ, имеющими постоянную скорость при ±Хвх > /2 вне зависимости от величины сигнала ошибки.
Следует отметить, что в более сложных электрических регуляторах непрерывного действия также часто используются ИМ с постоянной скоростью, управление которыми осуществляется через реле. Поэтому для них перемещение ИМ не является строго непрерывным
5. Импульсные регуляторы.
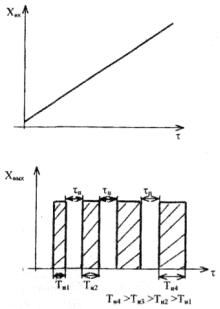
Импульсными называются регуляторы, в структуре которых имеется непрерывная часть и импульсный элемент, преобразующий непрерывно изменяющуюся регулируемую (входную) величину в последовательность модулированных импульсов. Импульсный элемент чаще всего включается на выходе непрерывной части управляющего устройства регулятора.
Различают три вида модуляции импульсов: амплитудно-импульсную, при которой модулируемым параметром является амплитуда (высота) импульсов, изменяющаяся в соответствии со значением входной величины Хвх; широтноимпульсную, при которой модулируемым параметром является ширина (длительность) импульсов Ти изменяющаяся в соответствии со значением входной величины в дискретные равностоящие моменты времени п (рис. 5.1); времяимпульсную, при которой модулируемым параметром, изменяющимся в соответствии со значением входной величины в дискретные равностоящие моменты времени, является частота следования импульсов.
Широко распространены регуляторы с широтно-импульсной модуляцией.
15
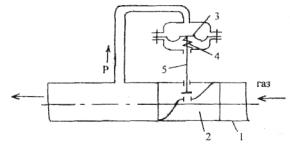
Рисунок 5.1 По сравнению с непрерывными регуляторами импульсные имеют ряд
преимуществ: возможность многоточечного управления, многократное использование линий связи, повышенную помехозащищенность. Импульсные регуляторы можно применять для управления объектов с запаздыванием, когда другие типы регуляторов неэффективны.
6. Регуляторы непрерывного действия
Регуляторами непрерывного действия называются регуляторы, у которых при непрерывном изменении регулируемой величины выходная величина изменяется также непрерывно
6.1 Регуляторы прямого действия
Регуляторами прямого действия называются такие регуляторы, у которых при изменении значения регулируемого параметра регулирующий орган приходит в действие непосредственно от сигналов, возникающих в чувствительном элементе без использования при этом вспомогательной энергии. Эти регуляторы применяются в тех случаях, когда сигнал чувствительного элемента обладает достаточной мощностью или создает достаточное усилие для непосредственного управления регулирующим органом.
На рис. 6.1 приведена схема регулятора давления среды в трубопроводе после регулирующего органа (регулятор "после себя") Объектом управления является трубопровод 1, по которому к потребителю подается газ. Требуется поддерживать заданное давление газа независимо от его расхода и других видов возмущений.
Рисунок 6.1
Регулятор представляет собой клапан с мембранным приводом. Принцип действия регулятора основан на уравновешивании силы упругой деформации пружины настройки 4 и силы, создаваемой давлением Р, действующим на мембрану 3 (чувствительный элемент).
При заданной величине давления условие равновесия сил, действующих на мембрану, имеет вид:
Pfm c |
(6.1) |
где Р - заданная величина давления; fm - эффективная площадь мембраны; с - жесткость пружины, - перемещение клапана 5.
16
При уменьшении, например, расхода газа к потребителю давление газа до клапана увеличивается на величину Р. Равновесие сил нарушается, и мембрана 3 прогибается вниз, перемещая клапан на величину . Вследствии этого меняется проходное сечение регулирующего органа и изменяется расход среды, а регулируемое давление восстанавливается. Новое условие равновесия сил на мембране:
(P P) fm c( )
или с учетом (6.1):
P* fm c*
откуда |
P* fm /c |
Следовательно, регулятор прямого действия формирует П-закон |
|
регулирования: |
|
Kp * P |
|
где Kp fm /c - для рассматриваемого примера.
Настройка регулятора на заданное давление осуществляется путем изменения жесткости пружины 4.
Регуляторы расхода прямого действия отличаются от рассмотренных тем, что на мембрану воздействует перепад давлений на сужающем устройстве.
В регуляторах температуры в качестве чувствительного элемента используется термобаллон, заполненный жидкостью и связанный капиллярной трубкой с корпусом регулятора, в котором установлена мембрана, связанная штоком с клапаном. В основу работы этого чувствительного элемента положен принцип действия манометрических термометров
Все рассмотренные регуляторы, как правило, формируют П-закон регулирования.
6.2 Регуляторы непрямого действия.
Регуляторами непрямого действия называются регуляторы, у которых при изменении значения регулируемой величины выходной сигнал чувствительного элемента управляет лишь усилительным или преобразующим элементом, к которому поступает от постороннего источника (электрической сети, насоса, компрессора и т.п.) вспомогательная энергия. Выходной сигнал усилительного элемента обычно воздействует на силовой элемент (исполнительный элемент), который, в свою очередь, воздействует на регулирующий орган с целью восстановления нарушенного равновесия в системе управления.
Структурная схема регулятора была приведена на рис. 3.
Регуляторы непрямого действия применяются обычно в тех случаях, когда требуется обеспечить большой коэффициент усиления системы с одновременным обеспечением высокой точности регулирования.
Самое широкое распространение в различных локальных САУ получили стабилизирующие регуляторы электрической ветви ГСП. Как правило, в комплекте с этими регуляторами работают исполнительные механизмы с электрическими двигателями постоянной скорости, управляемые через реле.
17
Следовательно, перемещение ИМ не является строго непрерывным. Однако в используемом на практике диапазоне работы регулятора фактическая ступенчатая (прерывистая) кривая перемещения регулирующего органа близка к плавной непрерывной кривой с переменной скоростью (рис 6.4). Поэтому такие регуляторы считаются непрерывными.
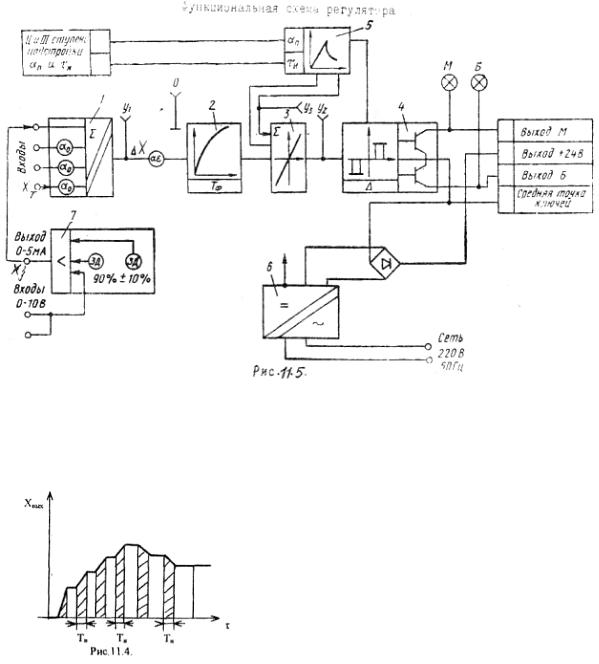
Современные электрические регуляторы непрерывного действия входят в состав агре-гатированных комплексов (АКЭСР, "Контур", "Каскад" и др) и выполнены по единообразной функциональной схеме. На рис. 11.5 приведена типовая функциональная схема регулирующего устройства (регулятора)
Схема содержит входной (измерительный) блок 1, демпфер 2, усилительсумматор 3, трехпозиционный орган 4. модуль отрицательной гибкой обратной связи 5, источник питания 6 и задатчик 7
Сигналы регулируемого параметра X, и задания X, поступают на входы блока 1, в котором происходит их алгебраическое суммирование и формируется сигнал ошибки . Сигнал ошибки через масштабирующее устройство поступает на демпфер 2, представляющий собой инерционное RC-звено с постоянной времени Тф. С выхода демпфера сигнал ошибки поступает на вход операционного
18
усилителя-сумматора 3, с выхода которого подается на вход трехпозиционного нуль-органа 4, имеющего зону нечувствительности . При сигнале ошибки, превышающем порог срабатывания регулирующего устройства, нуль-орган срабатывает и скачком подает сигнал в цепь отрицательной упругой обратной связи, представляющей инерционное RC-звено 5, и на выходные ключи, коммутирующие цепи внешней нагрузки. При срабатывании соответствующего полярности сигнала ошибки ключа на выходе регулятора появляется напряжение управления.
При включении цепи упругой обратной связи и сработанном состоянии нуль-органа 4 сигнал отрицательной обратной связи на выходе звена 5 начинает плавно увеличиваться и компенсировать сигнал ошибки на входе усилителясумматора 3. Сигнал на входе нуль-органа 4 плавно уменьшается до порога отпускания, после чего нуль-орган отключается, сигналы на выходе устройства и на входе модуля обратной связи скачком уменьшаются до нуля. Сигнал обратной упругой связи на выходе модуля 5 начинает плавно уменьшаться, а сигнал на выходе нуль-органа возрастать до порога срабатывания, после чего нуль-орган срабатывает, включает выходные ключи и подает сигнал в цепь отрицательной обратной связи. При сохранении сигнала ошибки цикл повторяечся.
Таким образом регулирующее устройство формирует на своем выходе импульсы, чередующиеся паузами. Интегрирование этих импульсов при помощи ИМ постоянной скорости позволяет получить ПИ-закон регулирования.
Контроль срабатывания нуль-органа в направлении "больше" или "меньше" осуществляется при помощи индикаторов "М" и "Б".
Для контроля работы отдельных блоков регулятора служат контрольные гнезда "О", "У1", "У2" и "УЗ".
Питание блоков регулятора осуществляется от источника питания 6.
7. Устройства формирования сигналя ошибки.
Всоответствии со структурной схемой (рис. 3) на регулятор 2 подается сигнал ошибки Х, который формируется задатчиком 1, измерительным блоком 10 и устройством сравнения 12. Блоки 1, 10 и 12 представляют собой устройство формирования сигнала ошибки.
Впростейшем случае сигнал ошибки Х равен:
Х = Хз – Хт, где Хт и Хз – текущее и заданное значения регулируемого параметра
соответственно.
Если в САУ используется П-регулятор, то сигнал ошибки включает в себя дополнительно сигнал жесткой обратной связи Хо.с.:
Х = Хз – Хт – Хо.с.
Для САУ с ПИД-регулятором сигнал ошибки равен
Х = Хз – Хт – Хо.с. ± X',
где X' – производная регулируемого параметра.
19

Формирование сигнала ошибки осуществляется с помощью преобразователей (резистивных, дифференциально-трансформаторных, токовых, температурных и др.). В САУ со стабилизирующими регуляторами Хз=const (заданное значение регулируемого параметра можно изменять вручную).
На рис. 7.1 показана схема устройства формирования сигнала ошибки, часто встречающаяся в САУ приборного типа, выполненная на базе резистивных преобразователей.
Рисунок 7.1
Преобразователь Rт текущего значения регулируемого параметра Хт включен в мостовую схему с преобразователем Rз заданного значения параметра Хз. С измерительной диагонали моста снимается сигнал ошибки Х = Хз – Хт. Ползунок Rт кинематически связан с указателем 2 измерительного прибора и, таким образом, может перемещаться синхронно с ним, т.е. пропорционально значению Хт. Ползунок Rз связан с указателем задания 1 и рукояткой ручного изменения задания 3. Когда указатели 1 и 2 совмещены, ползунки Rт и Rз находятся в одинаковом положении. Следовательно, в этот момент Хз = Хз, а Х = 0 (мост уравновешен). С изменением параметра Хт происходит перемещение ползунка Rт равновесия, и появляется сигнал ошибки, который поступает на командноусилителыюе устройство (КУУ) регулятора. Величина сигнала ошибки зависит от степени перемещения ползунка, а знак его - от направления перемещения ползунка, т.е. от того, в большую или меньшую сторону изменяется Хт по отношению к Хз.
Появление сигнала ошибки также может иметь место, если вручную изменить значение Хз перемещением рукоятки 3.
Рисунок 7.2
20