

ТСА / Конспект лекций
.pdfАналогично строится семейство кривых KP f K1 , рис. 9.3, б.
Формирование ПИ-закона.
Для формирования ПИ-закона в регуляторе необходимо отключить жесткую обратную связь и подключить гибкую обратную связь (оборвать связь-пунктир на рис. 9.1 – блок 9 соединить с блоком 8). При этом передаточная функция регулятора будет иметь вид;
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Y(P) |
|
|
|
|
|
|
|
|
K5 |
|
|
|
|
|
|
|
|
|
|
K6 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||||||||||
WПИ (P) |
|
K3 K4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K7 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
P |
|
|
|
|
|
X(P) |
|
|
|
|
|
|
T p 1 |
|
|
|
K6 K8 |
|
|
T p |
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф |
|
|
|
|
|
1 T |
|
|
p 1 |
|
|
S |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
K3 K4 K5 K6 K7 |
|
|
|
|
|
TИ p 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
TИ p 1 K6 K8 (TФ p 1) TS p |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
K3 K4 K5 K6 K7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TИ p 1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
(1 K6 K |
|
|
|
|
|
|
|
T |
|
p |
|
|
|
|
|
|
(T |
p 1) T p |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
8) |
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
1 |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
K6 K8 |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф |
|
|
|
|
|
S |
|||||||||||||||||||
Умножим и разделим на Ти полученное выражение и выполним ряд |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
преобразований: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
WПИ |
(p) |
K3 K4 K5 K6 K7 TИ |
|
TИ p 1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
TИ p |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
P |
|
|
|
|
|
|
T (1 K6 K8) |
|
|
|
|
|
T p |
|
|
|
|
|
|
|
1 |
T p 1 |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 K6 K8 |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
K |
|
|
TИ p 1 |
|
|
|
1 |
|
|
|
|
1 |
|
|
|
,где K |
|
|
|
K3 K4 K5 K6 K7 |
T ; |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
P |
|
|
T p T |
p 1 T p 1 |
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
T (1 K6 K8) |
И |
|||||||||||||||||||||||||||||||
|
|
|
|
И |
ПИ |
|
|
|
|
|
Ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
TПИ |
|
TИ |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
1 K6 K8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
После несложных преобразований окончательно получим |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
ПИ |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
WP (P) KP |
|
|
|
|
|
|
|
|
|
p 1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
1 T p |
|
|
|
T |
|
T p 1 ; |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
ПИ |
|
|
|
|
|
|
|
|
|
|
Ф |
|
|
|
|
|
|
|
|
|
|
||||||||||
Из вида передаточной функции следует, что реальный ПИ-регулятор представляет собой совокупность последовательного соединения идеального ПИрегулятора и двух балластных звеньев, которые ухудшают динамические свойства регулятора, внося колебательный (следовательно, более затяжной) характер в переходный процесс. Для инерционных объектов колебательность можно уменьшить отключением демпфера регулятора
Динамические свойства ПИ-регулятора изменяют путем изменения коэффициента передачи Кр (обычно изменением коэффициента К8, рис. 9.1) и времени изодрома Ти.
Шкала настройки К8 (на панели регулятора она обозначается как «скорость связи») градуирована в относительных единицах. Поэтому шкалу К8 предварительно необходимо протарировать, т.е. экспериментально построить семейство тарировочных кривых для нескольких фиксированных значений Ти (значения Ти устанавливают по шкале «время изодрома» или «время интегрирования»).
31
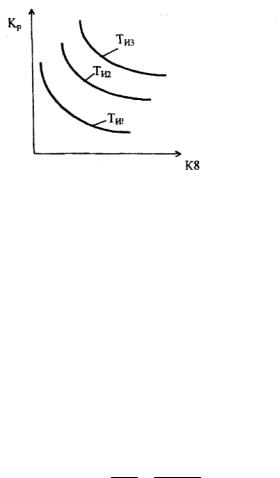
По методике, изложенной в лекции 12 для П-регулятора, вычисляются Кр и строятся тарировочные графики (рис. 9.4).
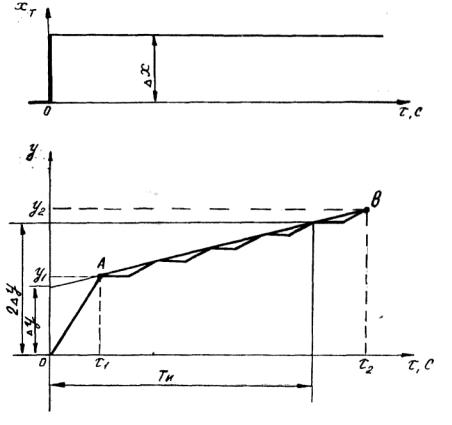
Для тарировки шкалы настроечного элемента Т„ следует экспериментально снять кривую разгона регулятора.
Рисунок 9.4 Для построения кривой разгона необходимо определить положение
регулирующего органа у2 после 4-5 небольших его перемещений и время 2, когда будет закончено последнее из них. Результаты эксперимента заносят в таблицу.
ХтН |
ХтК |
Х |
Yн |
Y1 |
1 |
Y2 |
2 |
|
|
|
|
|
|
|
|
На основании данных таблицы строят кривую разгона ПИ-регулятора (рис. 13.2) затем точки А и В, О и А соединяют прямыми линиями (прямая ОА – это пропорциональная составляющая управляющего воздействия, а АВ – интегральная составляющая). Продолжив луч АВ до оси ординат и обработав кривую разгона, как показано на рис. 9.5 определяют параметры настройки регулятора:
KP yn y1 yí ;
x x
а также время изодрома (удвоения) Ти, за которое интегральная составляющая удваивает действие пропорциональной составляющей.
Эксперимент по снятию кривой разгона следует повторить для различных положений настройки «скорость связи».
32
Кривая разгона ПИ-регулятора
Рисунок 9.5
Динамику работы ПИ-регулятора наглядно можно проиллюстрировать графиками прохождения сигналов в основных цепях регулятора. Характер изменения сигналов показан на рис. 9.6 (а – сигнал ошибки; б – сигнал на выходе регулятора; в – кривая разгона регулятора, т.е. перемещение регулирующего органа; г – сигнал на входе модуля упругой обратной связи; д – сигнал на входе формирующей части регулятора с учетом сигнала упругой обратной связи).
При ступенчатом изменении сигнала ошибки Х на входе формирующей части регулятора появится пропорциональное ему напряжение, которое вызовет срабатывание нуль-органа и на его выходе появится ступенчатый сигнал Хвых, под действием которого исполнительный механизм начнет перемещаться с постоянной скоростью, отрабатывая пропорциональную составляющую управляющего воздействия Y (см. интервал времени 0+ 1); к моменту 1 регулирующий орган займет положение y1 . Одновременно сигнал с выхода регулятора будет поступать на вход модуля обратной связи и конденсатор RC – звена модуля начнет заряжаться (рис. 9.6, г), а разностный сигнал Х – Хо.с. (рис. 9.6, д) на входе регулятора начнет уменьшаться. В момент времени 1 сигнал достигнет значения Хотп. (напряжения, при котором происходит отключение нульоргана) и сигнал на выходе peгулятора скачком (рис. 9.6, б) упадет до нуля.
33
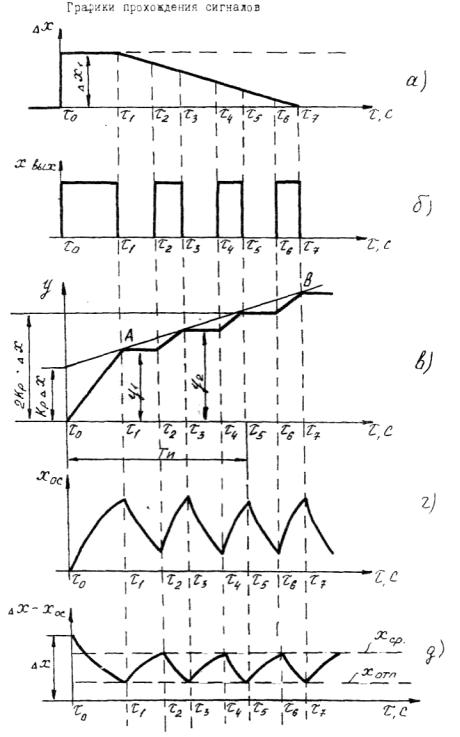
Рисунок 9.6
С момента 1 конденсатор RC – звена модуля обратной связи начнет заряжаться (Хо.с. уменьшается, рис. 9.6, г), следовательно, сигнал Х – Хо.с. начнет возрастать, т.к. к моменту – 2 сигнал ошибки (см. рис. 9.6, а) не стал равным нулю. Как только Х – Хо.с. достигнет порога срабатывания нуль-органа (значения Xср, при = 2) последний включится и на выходе регулятора появится импульс, длительность которого 3 – 2 определяется временем разряда RC – звена модуля обратной связи (временем изодрома). За время этого импульса регулирующий орган переместится в новое положение Y2: регулятор начнет отрабатывать
34
интегральную составляющую управляющего воздействия. С момента времени 2 появления импульса конденсатор RC – звена снова начнет заряжаться, а сигналХ – Хо.с. – уменьшаться. Циклическое включение интегральной части регулятора будет продолжаться до тех пор, пока сигнал ошибки не станет равным нулю (до момента времени 7, рис. 9.6, а).
По кривой разгона регулятора можно определить его настройки: Кр и Ти
(рис. 9.6, в).
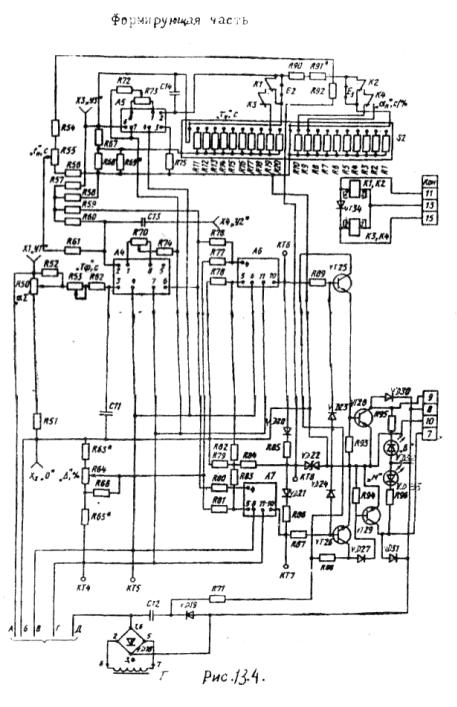
На рис. 9.7 приведена принципиальная электрическая схема формирующей части регулятора (для регуляторов РПЧ-У, РПЧ-Т и РПЧ-П комплекса АКЭСР формирующие блоки одинаковые).
Рисунок 9.7
35
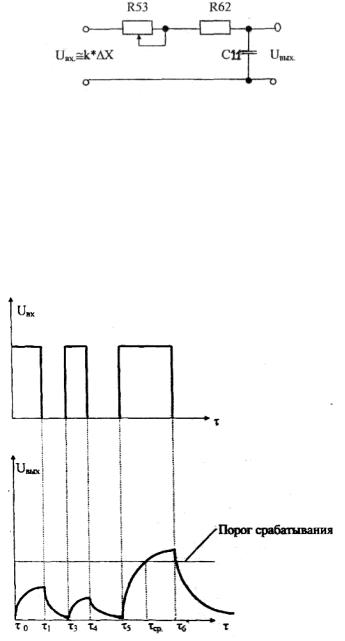
Сигнал ошибки, сформированный входным блоком регулятора, поступает по шинам А, Б на масштабирующее устройство R50, R51, а с него – на демпфер регулятора R53, R62 и СП. Демпфер представляет собой апериодическое звено (рис. 9.8) и служит для сглаживания кратковременных импульсов сигнала ошибки, поступающих со входного блока регулятора.
Рисунок 9.8
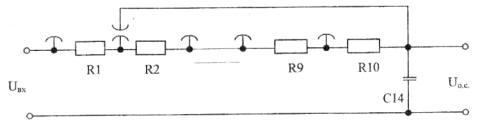
Постоянная времени демпфирования Тф плавно регулируется резистором R53 и равна Тф = (R53 + R62)*С11. Демпфирующее действие устройства заключается в следующем (рис. 9.9). При появлении на входе демпфера первого импульса (сигнала Uвх) начинается заряд С11 (интервал 0 – 1). Если длительность сигнала невелика, емкость С11 не успевает зарядиться до значения порога срабатывания нуль-реле регулятора. Следовательно, напряжение на выходных клеммах регулятора (выход М или выход Б) будет отсутствовать.
Рисунок 9.9
При достаточно большой ширине импульса (интервал 5– 6) в процессе заряда емкости напряжение на выходе демпфера Uвых. превысит порог срабатывания, и на выходных клеммах появится управляющий сигнал.
С выхода демпфера сигнал ошибки поступает на неинвертирующий вход 3 усилителя А4 (рис. 9.6), с выхода 6 которого поступает на вход трехпозиционного нуль-органа.
36
При отсутствии сигнала на А4 балансировку усилителя осуществляют переменным резистором R70.
Трехпозиционный нуль-орган состоит из двух независимых каналов. Первый канал включает в себя операционный усилитель А6 и транзисторы VT25 и VT28, второй – усилитель А7 и транзисторы VT26 и VT29.
Нуль-орган работает следующим образом. На объединенные входы R77, R81 усилителя А6 с делителя, образованного резисторами R63, R64 и R65, поступает положительное напряжение, определяющее порог срабатывания нуль-органа. Величину порога срабатывания (зону нечувствительности А) можно устанавливать резистором R64. На другие объединенные входы нуль-органа R76, R80 поступает сигнал с усилителя А4. Операционные усилители А6 и А7 образуют два двухпозиционных нуль-органа с гистерезисной характеристикой. При нулевом сигнале на выходе А4 на инвертирующий вход 4 усилителя А6 и неинвертирующий вход 5 усилителя А7 поступает положительное напряжение с резистора R64, поэтому на выходе А6 (клемма 10) напряжение отрицательное, а на выходе А7 (клемма 10) положительное. При этом транзистор VT25 закрыт, a VT26 открыт, и выходные транзисторы VT28 и VT29 закрыты. При наличии сигнала ошибки на входе А4, равном порогу срабатывания, происходит включение верхнего или нижнего нуль-органа в зависимости от знака сигнала ошибки. При этом открывается транзисторный ключ VT28 или VT29, и на выходных клеммах 9, 10 (при открывании VT28) или 7, 10 (при открывании VT29) появляется сигнал в виде прямоугольного импульса с амплитудой (24–30) В. Это напряжение через ключи VT28 или VT29 на выходные клеммы регулятора подается от источника питания, выполненного на мостике VD18.
Светодиоды VD32 и VD33 сигнализируют о появлении напряжения на клеммах 9, 10 или 7, 10 («больше», «меньше»).
В рассмотренном варианте под действием сигнала ошибки срабатывает пропорциональная часть регулятора (участок 0 – 1 – на рис. 9.6).
Чтобы регулятор отработал сигнал ошибки по ПИ-закону, пропорциональную часть его (усилитель А4) охватывают упругой обратной связью. В регуляторах агрегатированных комплексов обратная связь представляет собой апериодическое звено, в состав которого входят резисторы R1 – R10 и емкость С14 (рис. 9.7). Упрощенная схема RC – звена приведена на рис. 9.10.
Рисунок 9.10
При включенной обратной связи регулятор работает следующим образом (работу регулятора по схеме рис. 9.7 удобнее рассматривать совместно с
37
графиками на рис. 9.6). При срабатывании нуль-органа стабилизированное напряжение соответствующей полярности (знаку сигнала ошибки) с контрольной точки КТ8 поступает через делитель, образованный резисторами R92 и R1 (рис. 9.6), и резисторы R90 и R91 на емкость С14, в результате чего происходит ее заряд. Скорость заряда определяется величиной напряжения, подаваемого на R90 и R91, и регулируется путем подключения резисторов Rl, R2,.....,R10 (положение ползунка группы резисторов Rl, R2,.....,R10 определяет одну из настроек регулятора П – «скорость связи» – с постоянной времени заряда емкости С14,
равной Тз = C14 * (Rl + ... + R10)).
Напряжение обратной связи с емкости С14 подается на вход усилителя А5 и после усиления через делитель R57, R58 и резистор R60 – на вход А4. Поскольку этот сигнал по знаку противоположен сигналу ошибки, он компенсирует последний.
После того как сигнал обратной связи скомпенсировал сигнал ошибки, нульорган выключается, сигнал в точке КТ8, а, следовательно, на входе модуля обратной связи исчезает. С этого момента (рис. 9.6) начинается разряд емкости С14 через делитель R67, R68, R69 и секционированный переменный резистор R11
– R20.
Постоянная времени разряда (это – вторая настройка регулятора « и», рис. 13.4) регулируется путем подключения в цепь разряда переключателем и соответствующего номинала резисторов R11 – R20; она определяется как Tp = C14 * (R11 + ... + R20).
Разряд емкости С14 приводит к уменьшению сигнала обратной связи на входе 2 усилителя А4, что при наличии сигнала ошибки на входе 3 приведет к новому срабатыванию нуль-органа (участок 2 – 3, рис. 9.6).
То-есть, с этого момента начинает работать интегральная часть регулятора. Отработка интегральной части (участки 2 – 3, 4 – 5, 6 – 7 и т.д., рис. 9.6) будет происходить до тех пор, пока на входе регулятора не исчезнет сигнал ошибки, т.е. когда Хт не станет равным Xз.
С помощью резистора R55 можно изменять длительность интегральных импульсов tи при изменении коэффициента п так, чтобы длительность этих импульсов оставалась стабильной (неизменной). Резистор R55 совместно с резисторами R54 и R56 образует делитель напряжения, подключенный параллельно резистору переключателя п.
Реле К1-К4 служат для дистанционной дискретной в три ступени подстройки значений п и и.
Питание усилителей А4, А6 и А7 осуществляется через шины В и Г от источников стабилизированного питания входного блока ре1улятора.
Установку настроек регулятора п и и осуществляют после их вычисления расчетным путем (на основании параметров объекта Коб, Тоб и об) и тарировки шкал настроек п и и.
При помощи R50 ( ) регулируют чувствительность формирующей части; R64 ( ) – зону нечувствительности (порог срабатывания) нуль-органа; R53 (Тф) -
38
постоянную времени демпфирования; R55 (tи) – длительность интегральных импульсов.
Чувствительность по каждому из трех входов регулируют резисторами R18, R19 и R20 во входном блоке регулятора.
Сформированный в соответствии с выбранным законом регулирования сигнал с выходных клемм (9, 10 или 7, 10) формирующей части подается на пусковое устройство (пускатель); амплитудное значение этого сигнала – (24–30)В.
10. Принципы построения САУ с унифицированными токовыми сигналами.
Принятая в агрегатированных комплексах (АКЭСР, «Каскад», «Контур» и др.) токовая система связи позволяет применить один измерительный преобразователь для подачи сигнала на несколько устройств. Эти устройства соединяются последовательно друг с другом так, чтобы общее сопротивление нагрузки не превышало 1,0 кОм для сигнала (4–20) мА и 2,5 кОм для сигнала (0–5) мА. Таким образом, отключение одного из устройств или обрыв линии связи одновременно лишают информации все устройства. Поэтому для защиты от разрыва токовой цепи при отключении отдельных потребителей сигнала все цепи последовательно соединенных устройств шунтируются защитным устройством. В качестве защитных устройств используются стабилитроны с нелинейной вольтамперной характеристикой (например, типа КС156А).
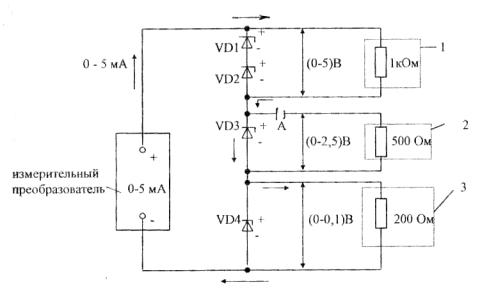
На рис. 10.1 приведена схема распределения токового сигнала преобразователя несколькими потребителями: УВМ 1 с входным сопротивлением 1 кОм, регулятором 2 с сопротивлением 500 Ом и измерительным прибором 3 с сопротивлением 20 Ом.
Рисунок 10.1
На линии связи включаются защитные устройства VD1 – VD4. В такой схеме обрыв линии в любой точке между защитным устройством и потребителями (например, в точке А) отключает лишь одного потребителя, сохраняя остальную цепь замкнутой. Приборы и устройства, работающие от напряжения постоянного
39
тока, подключают к одному преобразователю параллельно устанавливаемому нагрузочному сопротивлению, включенному в электрическую цепь двухпроводной линии связи. Номинальное значение нагрузочного сопротивления
выбирают из условия: RÈ Umax , где Umax – максимальное значение напряжения, на
Imax
которое рассчитано вторичное устройство (приемник); Imax – максимальное значение токового сигнала измерительного преобразователя (датчика).
11. Пусковые устройства САУ.
Пусковые устройства устанавливаются между регулятором и исполнительным механизмом и служат для управления ИМ. По способу управления исполнительным механизмом они подразделяются на контактные (контакторы) и бесконтактные (пускатели).
Пусковые устройства используются в качестве промежуточного усилителя мощности, т.к. сигнал напряжением 24 В постоянного тока, снимаемый с выхода регулятора, недостаточен для управления двигателем ИМ, рассчитанным на 220 В или 380 В переменного тока.
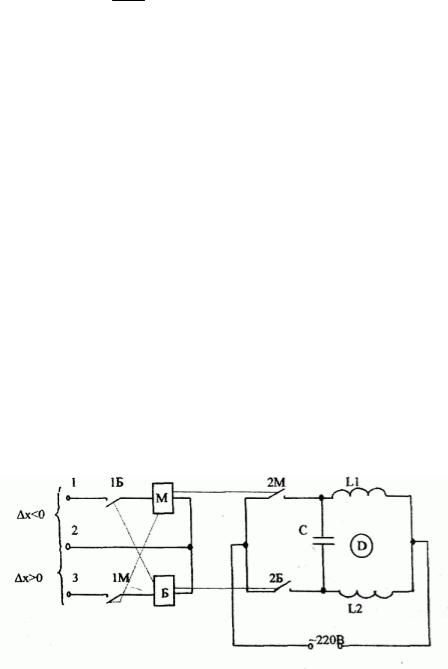
Электромагнитные контакторы. Простейший контактор представляет собой обычное эл/магнитное реле с группой контактов. На рис. 11.1 представлена электрическая схема типового контактора (например, типа МКР) и схема его подключения к двигателю ИМ. Основными элементами контактора являются две катушки Б ("больше") и М ("меньше") и две группы контактов: размыкающие 1Б и 1М, включенные в цепь между выходом регулятора и катушками; замыкающие 2Б и 2М, включенные в цепь управления двигателем Д.
Рисунок 11.1
В зависимости от знака сигнала ошибки х на клеммах 1,2 или 2,3 появляется напряжение постоянного тока 24 В. Подвижный якорь одной из катушек притянется к сердечнику катушки. При этом замкнется один из контактов 2М или 2Б. В случае замыкания контакта 2М двигатель начнет вращаться в сторону уменьшения Хт. Когда Х>0, замкнется контакт 2Б и произойдет реверс двигателя, в результате чего Хт начнет возрастать.
40