

ТСА / Конспект лекций
.pdfКонструктивно устройство формирования сигнала ошибки иногда выполняется по схеме на рис. 7.2. Резистивный преобразователь R имеет два подвижных ползунка, один из которых кинематически связан с указателем 1 измерительного прибора (его перемещение пропорционально Хт), другой - с указателем задания 2 (его перемещение пропорционально Хз). Когда Xз Xт, ползунки преобразователя занимают разное положение на обмотке и с части преобразователя г снимается напряжение, пропорциональное величине сигнала ошибки Х. Сигнал Хз изменяют рукояткой 3.
В САУ, строящихся с использованием агрегатированных комплексов (АКЭСР, "Каскад" и др.), сигнал ошибки формируется в виде унифицированного токового сигнала. На рис. 7.3 показана структурная схема задающего устройства таких САУ.
Рисунок 7.3
Рукояткой 2 задатчика перемещают ползунок преобразователя Rз, сигнал с которого, пропорциональный Хз, в виде напряжения поступает на преобразователь 3 "напряжение-ток". В этом преобразователе напряжение преобразуется в унифицированный токовый сигнал Iз, который затем сравнивается с аналоговым сигналом, пропорциональным Хт.
Благодаря стрелочному (или световому) указателю 1, значение Xз можно зафиксировать по шкале задатчика.
Задающие устройства могут быть установлены в измерительные приборы (встраиваемые задатчики) либо выпускаются в виде отдельного устройства (выносные задатчики, например, типа ЗД10К, РЗД, ЗУ и др.). К задатчикам типа ЗД10К и РЗД подается напряжение переменного тока не выше 36 В. К задатчикам ЗУ – от 24 В до 220 В.
На рис. 7.4 приведена принципиальная схема задатчика, встраиваемого в регуляторы, функциональная схема которых была приведена на рис 11.5. Как видно из рис. 11.5, значение Хз с внутреннего (встроенного) задатчика 7 подается на один из входов измерительного блока 1 регулятора На другой вход поступает значение Хт. Под дейсгвием сигналов Xз и Хт блок 1 формирует сигнал ошибки
Х ( ).
Внутренний задатчик (рис. 7.4) выполнен на операционном усилителе А1. Заданное значение параметра формируется с помощью двухступенчатого резистивного преобразователя: "грубо" - с помощью группы резистивных манганиновых катушек 499; "точно" - переменным резистором R15. Катушками можно изменять задание в диапазоне (0 100)% дискретно ступенями через 10%
21
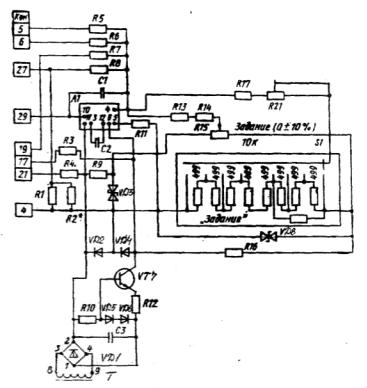
при помощи переключателя S1, резистором - плавно в пределах (0-10) % путем масштабирования опорного напряжения стабилитронов VD3 и VD8. Сигнал с двухступенчатого преобразователя поступает на усилитель А1, где он усиливается и преобразуется в унифицированный токовый сигнал (0-5) мА. Значение токового сигнала снимается с клемм 27 и 29 и подается на блок 1 (рис 6.3).
При необходимости к клеммам 17, 19, 21 можно подключить выносной резистивный задатчик (например, ЗД1ОК).
Рисунок 7.4
Усилитель А1 позволяет также проводить алгебраическое суммирование двух входных сигналов напряжения постоянного тока (0-10) В и преобразовывать их в выходной сигнал (0-5) мА; сигналы напряжения подаются на клеммы 4, 5 и 4, 6.
Питание двухступенчатого преобразователя и усилителя А1 осуществляется от источника стабилизированного питания, включающего в себя трансформатор Т, выпрямительный мостик VD1, диоды VD2, VD4, VD5, VD6, транзистор VT7 и
резисторы R10, R12 и R16.
В САУ с использованием агрегатированных комплексов АКЭСР, «Каскад», «Контур» и др. формирование сигнала ошибки осуществляется измерительным (входным) блоком, на вход которого поступают значения Xз, Xт, Хо.с. и т.п. Этот блок является одним из составляющих устройств регулятора.
Работу устройства формирования сигнала ошибки рассмотрим на примере системы АКЭСР, в которую входят регуляторы серии РП4: РП4-У (для унифицированных входных сигналов), РП4-Т (для сигналов температурных преобразователей – термометров сопротивления и термопар) и PI14-П (для
22
сигналов от дифференциально-трансформаторных, резистивных или индуктивных преобразователей).
Регулятор РП4-У предназначен для работы с унифицированными сигналами: на его четыре входа могут быть поданы сигналы (0-5) мА, а на два других входа –
(0-10) В.
РГТ4-Т могут работать с одним или двумя термометрами сопротивления, или одной термопарой стандартных градуировок.
РП4-П позволяет подключить к нему до четырех перечисленных выше преобразователей.
Рисунок 7.5
На рис. 7.5 приведена принципиальная электрическая схема входного блока регулятора РП4-У. На блок можно подать четыре токовых сигнала: на клеммы 1618; 20-22; 24-26; – текущие значения регулируемого параметра либо сигналы обратной связи; на клеммы 12-14 – сигнал задания от внутреннего задатчика (с клемм 27, 29 задатчика, см. рис. 7.4). Чтобы суммарный сигнал, поступающий на клеммы 16-18; 20-22 и 24-26, не превышал сигнала задатчика (0-5) мА, он масштабируется с помощью делителей RI8, R19 и R20. Поскольку текущие
23
значения параметров по знаку противоположны заданному параметру, подключение датчиков и задатчика необходимо выполнять так, чтобы в управляющих обмотках магнитного усилителя токи протекали, как показана на рис. 7.5. Магнитный усилитель, как известно, состоит из сердечника из магнитомягкого материала, на котором размещаются обмотка возбуждения (рабочая, контакты 1-2), четыре обмотки управления (контакты 7-8, 9-10, 11-12 и 13-14) и обмотка обратной связи (контакты 4-18). Кроме того, входной блок содержит операционный усилитель A3, резисторы R37 и R38 и усилитель А2, включенный по схеме интегратора.
Входная часть регулятора РП4-У работает следующим образом. Усилитель A3, включенный по схеме триггера Шмидта, находится в одном из своих устойчивых состояний за счет положительной обратной связи (резистор R43). Через рабочую обмотку магнитного усилителя при этом протекает однополярный ток намагничивания. Падение напряжения, созданное этим током на резисторе R38, приложенное к инвертирующему входу A3, меньше напряжения положительной обратной связи, приложенного к неинвертирующему входу. Поэтому триггер удерживается в устойчивом состоянии. По истечении времени сердечник магнитного усилителя приходит в состояние насыщения.
Индуктивное сопротивление рабочей обмотки уменьшается и ток в ней начинает расти. При этом возрастает и падение напряжения на R38, приложенное к инвертирующему входу. Когда напряжения на входах усилителя A3 сравняются, происходит переключение триггера в другое устойчивое состояние.
При отсутствии тока в обмотках управления среднее значение напряжения на входе усилителя А2 равно нулю. При появлении тока хотя бы в одной из обмоток управления характеристика линейного усилителя смещается и на делителе R37 – R38 появляется постоянная составляющая напряжения, которая поступает на вход А2. Это напряжение пропорционально сигналу ошибки, который с выхода А2 (шины А-Б) поступает к формирующему блоку регулятора.
Транзисторы VT9 и VT10 используются для получения достаточного тока для подмагничивания сердечника магнитного усилителя
Питание всей схемы входного блока осуществляется от источника стабилизированного напряжения (трансформатор Т, выпрямитель VD5 – VD8, диоды VD13, VDI4, транзистор VT17 и стабилитроны VD11, VD12).
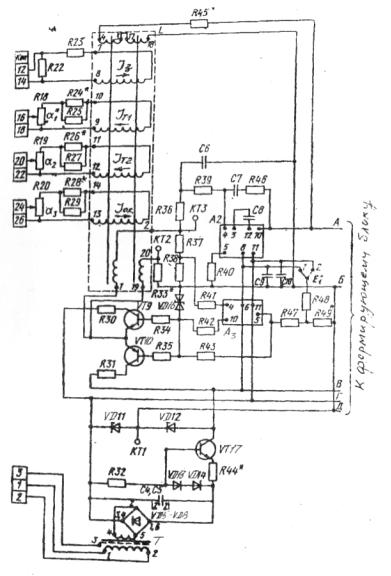
Формирование сигнала ошибки в регуляторе PП4-T осуществляется выходным блоком, принципиальная схема которого приведена на рис. 7.6. К блоку можно подключать один либо два термометра сопротивления, либо одну термопару.
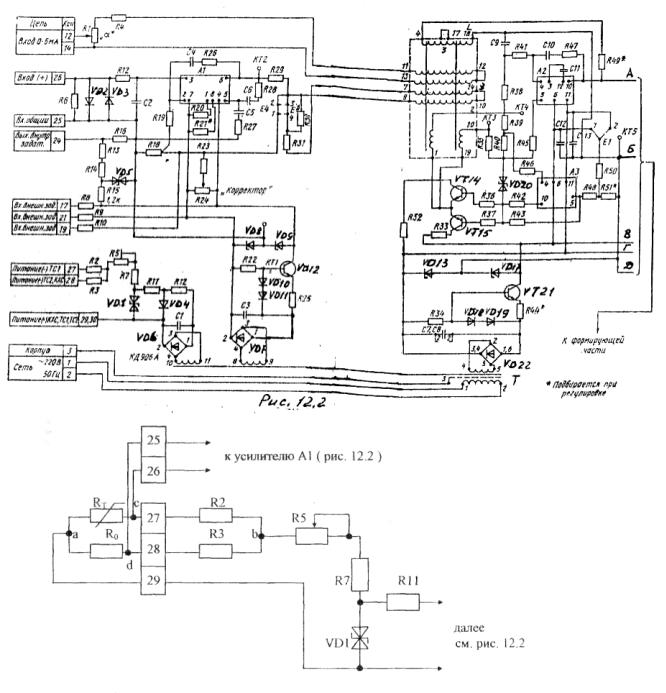
При подключении одного термометра сопротивления задействованы клеммы 25-26, 27, 28, 29. На рис. 7.7 показана схема подключения термометра Rт.
Термометр сопротивления Rт совместно с катушкой R0 (поставляется в комплекте с регулятором) и резисторами R2 и R3 образуют измерительный мост. К диагонали моста ab подводится питание от источника (трансформатор Т, мостик VD6, диод VD4, стабилитрон VD1, R7, R11 и RI2). С диагонали cd снимается сигнал, пропорциональный регулируемой температуре, который подается на клеммы 25, 26 входного блока. Через фильтр (рис. 7.6) R6, VD2, VD3, R12, С2
24
сигнал поступает на усилитель А1 и после усиления – на обмотку управления (контакты 7, 8, 9 и 10) магнитного усилителя.
На клеммы 17, 19, 21 поступает сигнал от внешнего задатчика, а с клемм через усилитель А1 – на ту же обмотку управления.
Рисунок 7.6
Таким образом, по обмотке протекает разностный ток, пропорциональный сигналу ошибки.
Далее работа устройства не отличается от рассмотренной ранее схемы, рис.
7.5.
25
Входной блок РП4-Т содержит три источника стабилизированного питания: на базе VD6 – для питания измерительного моста при работе с термометром сопротивления или коробкой холодных спаев при работе с термопарой; на базе VD7 – для питания схемы усилителя А1 и внешнего задатчика; на базе VD22 – для питания схемы усилителей А2 и A3.
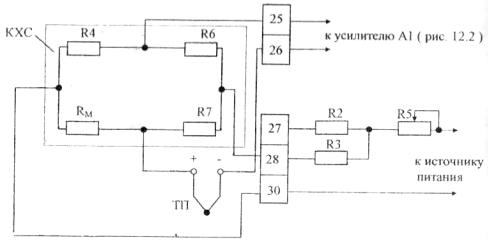
Подключение термопары и коробки холодных спаев к блоку осуществляется по схеме, рис. 7.8.
Рисунок 7.8
Сигнал, пропорциональный регулируемой температуре, от термопары ТП через коробку холодных спаев КХС поступает на клеммы 25, 26 входного блока и далее – к усилителю А1 (рис. 7.6). Питание моста КХС осуществляется постоянным током от источника питания блока через клеммы 28, 30.
Корректор R24 служит для балансировки усилителя А1 при отсутствии сигнала ошибки. Его можно использовать в качестве внутреннего задатчика с диапазоном установки задания ±5 %.
Если термометр сопротивления или термопара подключаются к входному блоку через нормирующий преобразователь, тогда унифицированный сигнал от преобразователя подают к клеммам 12, 14, а с них – к обмотке управления (контакты 11, 12, 13 и 14). Токи, протекающие по этим обмоткам, пропорциональны соответственно регулируемому и заданному параметрам. Поскольку токи в обмотках противоположно направлены, то разностный (результирующий) ток пропорционален сигналу ошибки.
8 Устройства формирования сигнала ошибки программных регуляторов.
Принципиальное отличие устройств формирования сигнала ошибки от ранее рассмотренных для стабилизирующих регуляторов заключается в том, что в программных САУ для формирования сигнала ошибки используются программные задатчики.
Схема простейшего устройства формирования сигнала ошибки показана на рис. 8.1.
26
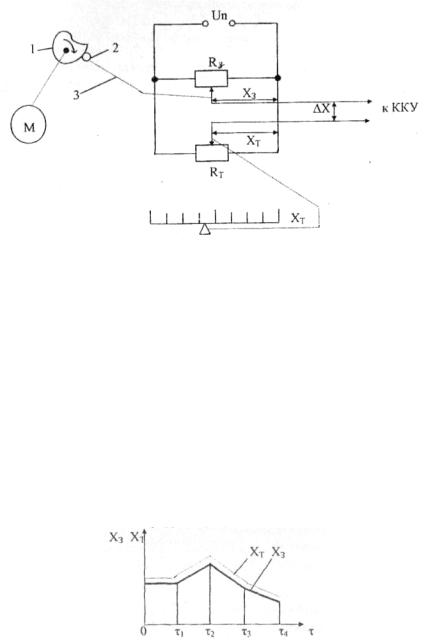
Рисунок 8.1
Так же как и в схеме (рис. 6.3), для формирования сигнала ошибки здесь используются резистивные преобразователи Rт и Rз. Но ползунок Rз в данной схеме перемещается не вручную в определенные промежутки времени, а непрерывно при помощи тяги 3, соединенной с роликом 2, который соприкасается с боковой поверхностью кулачка 1. Кулачек непрерывно поворачивается синхронным двигателем М с постоянной во времени скоростью (на рис. 8.1 – по часовой стрелке).
Профиль кулачка выполнен по определенному закону (программе). Для рассматриваемого примера характер (закон) изменения величины Хз иллюстрируется рисунком 8.2.
Рисунок 8.2
Пока ролик 2 касается поверхности кулачка, имеющей профиль окружности, он не меняет своего положения в пространстве, т.е. неподвижен Следовательно, неподвижен и ползунок R3, a X3=const (участок 0 – 1). При повороте кулачка по часовой стрелке ролик, попадая в углубление кулачка, смещается влево, увлекая за собой ползунок R3. При этом величина Х3 начнет возрастать (участок 1 – 2). Как только ролик перейдет через максимальный радиус кулачка, начнется смещение ползунка вправо, т.е. Х3 будет уменьшаться (участок 2 – 3 и 3 – 4).
В результате по рассмотренному закону будет исполняться и сигнал ошибки, а в итоге регулируемый параметр Хт будет также изменяться по программе, задаваемой устройством задания.
Регуляторы с программными задатчиками получили распространение в САУ термическими печами, в которых термообработка изделий (закалка, нормализация, цементация и др.) ведется по определенной программе.
27

9 Блок формирования законов регулирования.
После формирования во входном блоке сигнал ошибки поступает к формирующему блоку регулятора, при помощи которого можно сформировать требуемый закон регулирования (обычно – П- или ПИ-закон для регуляторов серии РП4).
На рис. 9.1 показана структурная схема регулятора РП4-У, состоящая из типовых (элементарных) звеньев с обозначенными на них передаточными функциями. Звенья 1, 2, 3, 4, 5, 6, 8 и 10 – усилительные (пропорциональные), звенья 7 и 9 – апериодические, звено 11 – интегрирующее. Причем, звенья 2, 3, 4, 5 и 6 входят в состав входного блока регулятора, звенья 7, 8 и 9 – в состав формирующего блока; звено 10 – это пусковое устройство, которое подключается к выходу регулятора и конструктивно не входит в состав регулятора; звено 11 – исполнительный механизм с постоянной скоростью двигателя.
Звенья 2, 3, 4 и 5 – это масштабирующие устройства входного блока (делители R22-R23, R18, R19, R20, см. рис. 7.3); звено 6-усилительная часть входного блока (магнитный и электронный усилители, рис. 7.4).
На примере схемы рис. 9.1 рассмотрим принцип формирования законов регулирования и динамику работы регулятора.
Формирование П-закона. Как известно из курса ТАУ, для получения П- закона необходимо усилительную часть регулятора охватить отрицательной жесткой обратной связью (см. пунктир на рис. 9.1), одновременно отключить гибкую обратную связь (оборвать связь звена 9 со звеном 8, см. * на рис. 8,1). При этом передаточная функция П-регулятора будет иметь вид:
28

|
|
|
|
|
|
|
|
|
|
K3 K4 |
|
|
|
K5 |
K6 K7 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
WPП (P) |
Y(P) |
|
|
|
|
|
|
TФ P 1 |
|
|
|
|
|
|
|
|
|
|
|
TS p |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
K5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
X(P) 1 K1 K4 |
|
|
|
K6 K7 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
TФ P |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TФ P 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
K3 K4 K5 K6 K7 |
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K3 K4 K5 K6 K7 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TФ P 1 TS P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
(TФ P 1) TS P K1 K4 K5 K6 K7 |
|
|
T T |
S |
P2 T |
S |
P K1 K4 K5 K6 K7 |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
(TФ P 1) TS P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K3 K4 K5 K6 K7 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TФ TS P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TS P |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
K1 K4 K5 K6 K7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
K1 K4 K5 K6 |
K7 |
|
|
|
K1 K4 K5 K6 K7 |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
K |
P |
|
|
|
|
1 |
|
|
|
|
, |
|
|
где К |
р |
|
|
K3 |
; |
|
|
|
T |
a |
|
|
|
|
TS |
|
|
|
|
|||||||||||||||
T T |
|
P2 |
T |
|
|
|
|
|
|
|
K4 |
|
|
|
|
K1 K4 K5 K6 K7 |
|
|||||||||||||||||||||||||||||||
|
|
|
|
a |
a |
P 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
Ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Таким образом, передаточная функция реального П-регулятора имеет вид:
W П (P) K |
|
* |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
P |
|
P |
|
Tф *Ta *P2 Ta * P 1 |
(9.1) |
|
|
||
т.е., |
реальный |
П-регулятор |
представляет |
собой |
совокупность |
||||
последовательно соединенных идеального П-регулятора с передаточной функцией Кр, и балластного инерционного звена 2-го порядка. Балластное звено ухудшает динамические свойства (в частности, увеличивает время регулирования) регулятора.
Характер переходного процесса в регуляторе определяется корнями характеристического уравнения:
T *T |
a |
* p2 T *P 1 0 |
|
|
|||||
Ф |
|
|
|
a |
|
|
|
||
|
|
|
Его корни: |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
T |
a |
T2 |
4*T *T |
a |
|
||
P |
|
|
|
|
a |
Ф |
|
||
|
|
|
|
|
|
|
|
|
|
1,2 |
|
|
|
|
2*TФ *Ta |
|
|
||
|
|
|
|
|
|
|
|||
Если Та<4Тф, корни комплексные, и переходный процесс носит затухающий колебательный характер (кривая 1 на рис. 9.2). Для инерционных объектов (регулирование температуры, уровня, влажности и т.п.) демпфер регулятора отключают, т.е. Тф=0, а передаточная функция регулятора принимает вид:
W Ï (P) K |
|
* |
|
1 |
|
T * p 1 |
|||
P |
P |
|
||
|
|
|
|
a |
В этом случае переходный процесс носит апериодический характер (кривая
2 на рис. 12.1).
При Та > 4ТФ в соответствии с передаточной функцией (9.1) переходный процесс имеет вид кривой 3 (рис. 9.2).
Показатели качества (время регулирования, статическую ошибку, перерегулирование и др.) переходного процесса регулятора и системы в целом можно изменить, меняя коэффициент передачи регулятора КР=КЗ/К1, который, в свою очередь, меняют изменением коэффициентов КЗ либо К1 делителей
29
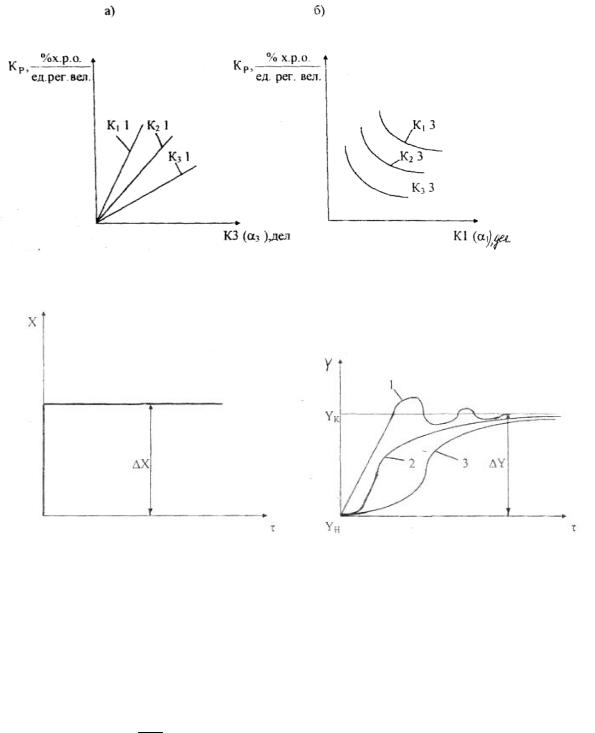
напряжения R18, R19 и R20 (рис. 8,3), т.е. изменением чувствительностей 1, 2 и3 входного блока. Обычно шкалы делителей R18, R19 и R20 градуированы в относительных единицах (реже в процентах), поэтому перед установкой настроечных коэффициентов КЗ и К1 шкалы делителей тарируют, строят тарировочные графики и по ним на основании заранее найденных значений КР находят (рис.9.3) величину настройки в делениях шкалы делителей R18, R19, R20.
Рисунок 9.2
Рисунок 9.3
Тарировочные графики строятся на основании экспериментальных данных. Так, для построения графика (рис. 9.3, а) по шкале 1 устанавливают какое-либо значение К1 (К1 1, К2 1, К3 1 и т.д.), а по шкале 3 – значение КЗ; скачком подают на вход регулятора возмущение Х (рис. 9.2). Фиксируют величину изменения выходного сигнала регулятора Y=YK–YH (перемещение регулирующего органа).
KP Y
Вычисляют X . Не меняя значения К1, устанавливают новое значение КЗ, и для него снова вычисляют КР и т.д. Для тех же значений КЗ, но другого K1 повторно выполняют перечисленные операции. Таким образом получают семейство тарировочных кривых.
30