

ТСА / Конспект лекций
.pdfРисунок 13.3
Общий вид ключа с лицевой стороны показан на рис. 13.3. С помощью рукоятки 1 ключ можно повернуть в одну («Б») либо другую («М») сторону на угол 45°. При отпускании рукоятки она самопроизвольно установится в положение «Н» (нейтраль).
13.3 Универсальные переключатели
Основное назначение переключателей - выбор режима работы САУ. Они позволяют коммутировать от одной до шестнадцати цепей. На рис. 13.4 показана электрическая схема переключателя на пять цепей и три режима работы («Авт.», «Ручн.» и «Нейтр.»).
Рисунок 13.4
Коммутируемая цепь на схеме обозначается зачерненной точкой, которая наносится на вертикальной пунктирной линии под коммутируемой цепью. Так, при установке рукоятки переключателя в режим «Авт.» будут скоммутированы цепи 1,2 и 3,4; в режиме «Нейтр.» - все цепи разомкнуты; в режиме «Ручн.» - цепи 7,8 и 9,10. Цепь 5,6 не коммутируется ни в одном из режимов работы переключателя.
Конструктивно универсальный переключатель состоит из набора «звездочек», установленных на общей оси. Ось проходит через лицевой щиток переключателя, и на ее выступающий конец крепится рукоятка переключения (см. Рис. 13.3). Количество «звездочек» равно числу коммутируемых цепей (в нашем примере - пять). Профиль «звездочек» выполнен так, чтобы переключение цепей производилось по определенной программе. Например, профиль «звездочек», с
51
помощью которых производится замыкание контактов в цепях 1,2 и 3,4, должен быть одинаковым. Для цепей 7,8 и 9,10 - тоже одинаковым, но отличным от профиля «звездочек» для цепей 1,2 и 3,4.
В САУ часто используются переключатели типа УП или ПМОФ (переключатель малогабаритный, однооборотный, с фиксатором положения рукоятки); в качестве ключей управления - типа ПМОВ (то же, но с возвратом рукоятки в исходное положение).
13.4 Блоки ручного управления.
В отличие от ранее рассмотренных устройств дистанционного управления, которые выпускаются в виде отдельных устройств, выполняющих определенные функции, блоки ручного управления изготовляют единой конструкцией, в состав которых могут входить кнопочные станции, ключи управления, универсальные переключатели, а также световые индикаторы положения регулирующего органа и указатели положения регулирующего органа.
Блоки ручного управления выпускаются типа БРУ, БУ и др. Они, как правило, входят в комплект агрегатированных комплексов электрических средств регулирования (АКЭСР, «Каскад», «Контур» и т.п.). В качестве примера можно привести блоки: БРУ-1К, БРУ-12-для ручного переключения цепей (аналог ключа управления); БРУ-2К, БРУ-22 - для ручного переключения цепей и с кнопочной станцией; БРУ-3К - для ручного выбора режима работы и с кнопочной станцией; БРУ-У, БРУ-32 - для ручного выбора режима работы САУ, с кнопочной станцией, световой индикацией положения регулирующего органа и указателем положения регулирующего органа.
На рис. 13.5 приведена электрическая схема блока ручного управления типа БРУ-32. Блок позволяет осуществлять выбор режима работы САУ с помощью переключателя S1 на два положения «Авт.» и «Ручн.». В ручном режиме управления ИМ производится кнопками S3 («Б»-больше) и S2 («М»-меньше). В автоматическом режиме сигнал от регулятора через клемму 6 и верхний контакт S1 БРУ снимается с клеммы 7 и подается на пускатель (выход «М»-меньше). Либо через клемму 9 и нижний контакт S1 снимается с клеммы 10 БРУ (выход «Б»- больше). При ручном режиме переключатель S1 переводится в положение «Ручн.». Между клеммами 8 и 20, 11 и 18 устанавливаются перемычки. К клемме 19 подводится положительный потенциал 24 В от источника постоянного тока (минусовой потенциал постоянно подается к средней клемме пускателя). Для закрытия регулирующего органа нажимают штифт S2 («меньше»). При этом «плюс» 24 В через клемму 19, верхнюю группу верхних контактов кнопки S3, нижнюю группу нижних контактов кнопки S2, клеммы 20, 8, нижнюю группу нижних контактов S1 и клемму 7 подается на вход пускателя «М».
Аналогично можно проследить прохождение сигнала при нажатой кнопке S3 («Б») для случая открытия регулирующего органа.
52
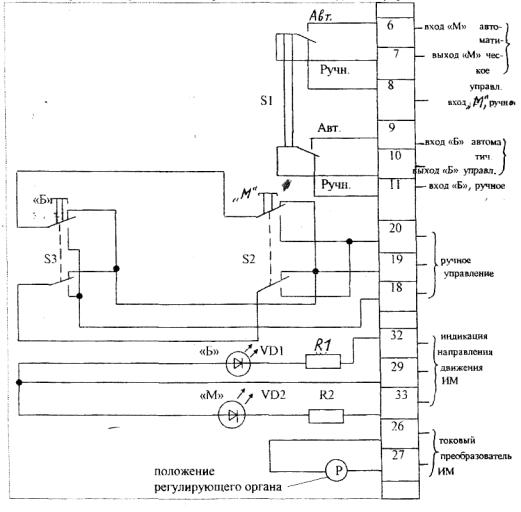
Рисунок 13.5
Светодиоды VD1 и VD2 служат для индикации направления перемещения регулирующего органа (в сторону «М» или «Б»). С этой целью устанавливают перемычки между клеммами 10,32 и 7,33, а к клемме 29 подводится отрицательный потенциал 24 В от источника постоянного тока.
Указатель положения регулирующего органа через клеммы 26 и 27 подключается к токовому преобразователю положения регулирующего органа, установленному в корпусе ИМ и кинематически связанному с валом двигателя ИМ.
14 Указатели положения регулирующего органа.
Указатели положения предназначены для дистанционного указания положения выходного вала ИМ и кинематически связанного с ним регулирующего органа. Указатели используются лишь в тех случаях, когда ИМ оборудован токовым, индуктивным или резистивным преобразователями.
Шкалы измерительных приборов указателя градуируются в процентах (0% - полное закрытие регулирующего органа; 100% - полное открытие).
На рис. 14.1 показана электрическая схема указателя типа ДУП-М.
53
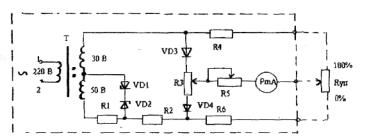
Рисунок 14.1
Указатель состоит из измерительного неуравновешенного моста и узла питания моста. Плечи моста образуют резисторы R4, R6, переменный резистор R3
ирезистивный преобразователь Rуп, конструктивно размещенный в корпусе ИМ (ползунок Rуп кинематически связан с валом ИМ). Измерительный прибор PmA и резистор R5 включены в измерительную диагональ моста. В другую диагональ подается напряжение с узла питания, состоящего из понижающего трансформатора Т, вторичные обмотки которого соединены между собой встречно, баластных резисторов R2, R4 и R6, служащих для ограничения величины тока питания моста и питания преобразователя Rуп. Стабилитроны VD1
иVD2 служат для стабилизации напряжения моста. Резистор R1 обеспечивает необходимый режим работы стабилитронов, а переменные резисторы R3 и R5 предназначены соответственно для балансировки моста (установки стрелки прибора PmA на нулевую отметку при закрытом положении регулирующего органа) и установки чувствительности указателя (установки стрелки прибора на конечную отметку при полностью открытом положении регулирующего органа).
Вкачестве измерительного прибора в указателе используется милливольтметр магнитоэлектрической системы, поэтому в схеме предусмотрены диоды VD3 и VD4.
На рис. 15.6 ползунок показан в среднем положении (50% шкалы прибора). Когда ползунок RЗ находится также в среднем положении, мост уравновешен. При изменении положения вала ИМ в сторону открытия или закрытия регулирующего органа ползунок Rуп смещается вверх либо вниз, нарушается баланс моста, и через прибор PmA начинает протекать ток, пропорциональный степени открытия регулирующего органа.
Конструктивно указатели выполняются выносными (типа ДУП-М, ДУП-Б, ДУП-К и др.) или встроенными (размещаются в блоках ручного управления).
Электрические узлы выносных указателей монтируются в пластмассовом кожухе, который крепится на щите КИП и А.
Настройку указателя выполняют следующим образом. Маховиком ручного привода ИМ устанавливают регулирующий орган в положение «закрыто». Вращением рукоятки ползунка R3 устанавливают стрелку измерительного прибора на отметку «О». Перемещают регулирующий орган в положение «закрыто» и рукояткой резистора R5 устанавливают стрелку прибора на отметку
«100».
Если в ИМ используется индуктивный преобразователь, он подключается к тем же клеммам 3,4, 5 указателя, что и резистор Rуп.
54
Указатели положения относятся к так называемым сервисным техническим средствам автоматики. Они позволяют обслуживающему персоналу получать визуальную информацию о положении регулирующего органа.
15. Задающие устройства (задатчики).
Задатчики предназначены для ручной установки заданного значения регулируемого параметра стабилизирующих регуляторов (например, резистивные задатчики дистанционные типа РЗД-12); ручной установки задания и преобразования одного вида унифицированного сигнала постоянного тока или напряжения в другой (например, типа РЗД-22). Входными сигналами РЗД-22
являются: (0-5) мА, (0-20) мА, (4-20) мА и (0-10) В; выходными: (0-5) мА, (0--20)
мА, (4-20) мА и (0-10) В. Выходной сигнал РЗД-12: изменение сопротивления переменного резистора.
Задатчики РЗД-12 и РЗД-22 выпускаются выносными (ранее были рассмотрены задатчики, встроенные в регулирующий прибор, - для регулятора РП4-У).
Задатчики РЗД-12, ЗД-10К и т.п. представляют собой обычный резистивный преобразователь. Конструктивно они состоят из пластмассового корпуса, в котором размещается переменный резистор, и передней панели, на которой расположена ручка установки задания с визиром (указателем) и шкала на 50 делений. Ручка насажена на ось резистора.
Электрическая схема задатчиков типа ЗД-10К и РЗД-12 приведена на рис.
15.1.
Рисунок 15.1
Конструкция РЗД-22 отличается от РЗД-12 тем, что корпус состоит из сборного каркаса, имеющего переднюю и заднюю панели, соединенные боковинами. К передней панели, кроме переменного резистора, крепятся подстроечные резисторы, доступ к которым осуществляется через отверстия с соответствующими надписями. На задней панели размещена электрическая схема задатчика.
Работу РЗД-22 рассмотрим по схеме (рис. 15.2). В основу работы задатчика положено управление выходным напряжением операционного усилителя с помощью регулируемого делителя напряжения на одном из входов усилителя. Задатчик состоит из резистивного преобразователя, регулируемого делителя напряжения, усилителя постоянного тока и источника питания. В состав усилителя постоянного тока входят операционный усилитель А и усилитель, собранный на транзисторе V10.
55

Делитель напряжения состоит из резистора R3 и набора резисторов R1-R8, которые могут подключаться параллельно или последовательно к переменному резистору R3 в зависимости от диапазона изменения входного сигнала.
Источник питания включает в себя трансформатор Т, выпрямительные мостики V6 и V8 и сглаживающие конденсаторы СЗ и С4. Питание операционного усилителя осуществляется от стабилизатора тока, выполненного на транзисторе V3, стабилитроне V5 и резисторах R10 и R11.
Напряжение на делитель R1-R8 поступает от стабилитрона V4.
С помощью переменных резисторов R12 и R2 устанавливаются значения выходных сигналов задатчика - 0% и 100% соответственно (для выходных сигналов 0-5 мА, 0-20 мА или 0-10 В). Значения выходного сигнала (4-20) мА устанавливается резисторами R4 (значение 4 мА) и R2 (значение 20 мА). Установка начального значения выходного сигнала производится при нулевом положении рукоятки резистора задания R3, а конечного - при установке рукоятки на максимальную отметку шкалы задатчика.
Вращение осей резисторов К.12Д4 и R2 производится через отверстия на передней панели задатчика, обозначенные цифрами "0", "1" или "2" соответственно.
Рисунок 15.2 На рис. 15.3 приведены примеры установки перемычек на входном разъеме
задатчика для некоторых вариантов выходных сигналов, а на рис. 15.4 - примеры подключения к выходному разъему приемников выходных сигналов.
56
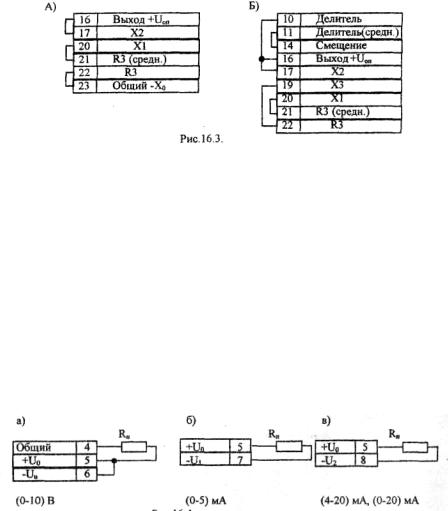
Рисунок 15.3
На рис.15.3,а показана схема подключения перемычек для выходных сигналов задания (0-5) мА, (0-20) мА и (0-10) В от внутреннего источника опорного напряжения. Опорное напряжение (0-1) В со стабилитрона V4 (рис.16.2) поступает через клеммы 16, 17 (положительный потенциал) и клеммы 23, 22 (отрицательный потенциал) на делитель R1-R3. Часть опорного напряжения, пропорциональная перемещению ползунка резистора R3, через клеммы 21, 20 подается на цепочку R9-C1, а с нее - на вход усилителя А. Выходной унифицированный сигнал снимается с клемм 5, 8 (0-20 мА и 4-20 мА), либо клемм
4, 5, 6 (0-10 В), см. Рис.15.2 и 15.4.
Рисунок 15.4
На рис. 15.3,б показан вариант подключения перемычек для выходных сигналов задания (4-20) мА. Положительный потенциал со стабилитрона V4 через клеммы 10, 16 (рис. 15.2) поступает на резисторы R4, R5, R6, R7, соединяющиеся, благодаря перемычкам на клеммах 11, 14, между собой последовательно. С помощью переменного резистора R4 устанавливается начальное значение выходного тока задатчика 4 мА (смещение). Отрицательный потенциал на делитель R4, R7 со стабилитрона поступает через провод "Общий" (–Х0).
Резисторы R4, R5, R6 и R7, благодаря перемычкам между клеммами 19, 22, последовательно соединяются с резисторами R1, R2 и резистором задания R3, сигнал задания с которого через клеммы 20, 21 подается на вход усилителя. Часть опорного напряжения со стабилитрона V4 на делитель R1, R2, R3 поступает через клеммы 17, 19, 22 (положительный потенциал - через клемму 17; отрицательный - через резисторы R5, R6, клеммы 19, 22).
Для выходного сигнала задатчика (4-20) мА в положении "Нуль" его рукоятки на клеммах 5, 8 (рис. 15.4) должен быть токовый сигнал 4 мА. Это значение тока устанавливается перемещением ползунка R4 (смещение "нуля").
Погрешность преобразования сигналов в задатчиках РЗД, ЗД и др. - в пределах ± 1,5%.
57

16 Принципиальные электрические схемы локальных САУ.
Принципиальная электрическая схема составляется после обоснования и выбора технических средств автоматики, которые предполагается задействовать в проектируемой САУ. Удобнее принципиальную схему составлять на основе структурной схемы САУ.
В качестве примера рассмотрим САУ температурой воды, значение которой может изменяться в диапазоне (0 100) °С.
Поскольку верхний предел температуры невысок, выбираем медный термометр сопротивления гр. 50М. В проектируемой САУ недопустима статическая ошибка, поэтому в качестве регулирующего прибора выбираем регулятор РП4-У, реализующий ПИ-закон. От термометра регулятор РП4-У непосредственно не может воспринимать входной сигнал. Для преобразования сопротивления ТСМ предусматриваем нормирующий преобразователь гр. 50М с входным сигналом (0-100) °С и выходным сигналом (0-5) мА (типа П288). Для усиления выходного сигнала регулятора выбираем бесконтактный пускатель ПБР2М2, а в качестве исполнительного механизма – МЭО 10/100-0,25. Так как регулирующий орган должен плотно перекрывать сечение трубопровода в положении полного закрытия, в качестве последнего берем регулирующий клапан типа КР. Для дистанционного управления ИМ можно выбрать либо универсальный переключатель и кнопочную станцию (рис. 16.2), либо блок ручного управления (рис.16.3), например, типа БРУ-32 с индикатором положения регулирующего органа. В БРУ-32 в качестве индикатора используется магнитоэлектрический прибор, поэтому МЭО должен быть оснащен токовым преобразователем положения регулирующего органа.
Регулятор РП4-У имеет внутренний задатчик, следовательно, необходимости в применении выносного задающего устройства в данной САУ нет.
На основании выбранных ТСА составляем структурную схему САУ температурой (рис. 16.1).
Рисунок 16.1
Текущее (регулируемое) значение температуры tТ воспринимает термометр ТСМ и преобразует его в величину омического сопротивления RТ. С помощью преобразователя НПр сопротивление преобразуется в токовый сигнал IT, который подается на вход РП4-У. Во входном блоке регулятора текущее значение IT сравнивается с заданным значением температуры, в результате чего формируется сигнал ошибки, а с выхода РП4-У снимается сигнал t, пропорциональный сигналу ошибки. Под действием сигнала t, усиленном пускателем ПБР, ИМ приходит в движение и перемещает шток клапана КР. Управляющее воздействие у поступает на объект регулирования (трубопровод), в результате чего значение tТ стабилизируется на уровне заданного значения tЗ.
58
На принципиальной схеме технические средства автоматики изображаются в виде прямоугольников, внутри которых наносится тип устройства, а над ним – номер позиции. У клемм указывается их номер и назначение входа и выхода ("Б" - больше, "М" - меньше и т.п.).
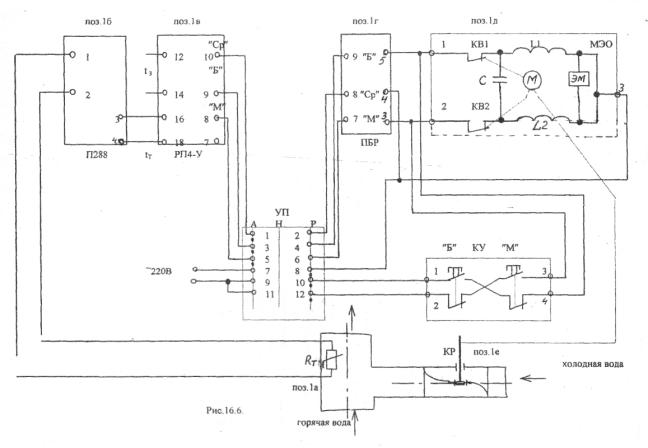
САУ, изображенная на рис.16.2, может работать в двух режимах: автоматическом и ручном. Выбор режима осуществляется универсальным переключателем УП на три положения: "А" - авт., "Р" - ручн., "Н" - нейтральное.
Автоматический режим. Для перевода САУ в автоматический режим (от регулятора) переключатель УП необходимо переключить в положение "А". В этом случае управляющий сигнале регулятора будет поступать на пускатель через УП.
Рисунок 16.2
САУ (рис. 16.2) предназначена для регулирования температуры воды путем подмешивания в трубопровод холодной воды. Температура горячей воды измеряется термометром RT, сигнал с которого поступает на нормирующий преобразователь П288, где сопротивление преобразуется в токовый сигнал, пропорциональный регулируемой температуре tТ. Этот сигнал поступает на вход регулятора (клеммы 16, 18). Заданное значение температуры поступает на клеммы 12, 14 регулятора от внутреннего задатчика регулятора. В зависимости от знака сигнала-ошибки управляющий сигнал появляется либо на клеммах 7, 10 ("меньше"), либо 9, 10 ("больше")- Поскольку УП находится в положении "А", сигнал с регулятора поступит на входные клеммы 7, 8 ("меньше") либо 8, 9 ("больше") пускателя по цепям переключателя 1,2 и 5,6 или 1,2 и 3,4. С выхода пускателя (клеммы 3,4 - "меньше", либо 4,5 - "больше") усиленный сигнал
59
управления подается на клеммы 2,3 или 1,3 исполнительного механизма. В зависимости от фазы управляющего сигнала двигатель ИМ включится в одну или другую сторону и начнет перемещать шток регулирующего клапана КР, изменяя расход холодной воды, подмешиваемой к горячей, до тех пор, пока температура воды не достигает заданного значения.
Одновременно с включением двигателя ИМ обмотка ЭМ тормоза получает питание и происходит растормаживание вала двигателя.
Ручной режим. Для дистанционного управления ИМ переключатель УП переводится в положение "Р" (ручное). При этом размыкаются его цепи 1-2, 3-4, 5- 6 и замыкаются 7-8, 9-10 и 11-12. На вход ИМ при нажатии одного из штифтов кнопки управления КУ будет поступать напряжение 220В от сети.
При любом режиме работы САУ двигатель ИМ отключается конечными выключателями KB (см. пунктир) при полном открытии или закрытии клапана.
При исчезновении управляющего сигнала на входных клеммах ИМ двигатель и обмотка ЭМ обесточиваются, и вал двигателя затормаживается.
Врассмотренном варианте схемы в режиме "Ручное" напряжение на ИМ поступает, минуя пускатель. При ручном режиме управление ИМ можно производить и через пускатель. Для этого к клеммам 7, 9, 11 переключателя следует подать напряжение 24В постоянного тока. Клемму 8 переключателя соединить с клеммой 8 пускателя ("Ср."), а клеммы 3 и 4 соединить соответственно с клеммами 7 и 9 пускателя.
На рис. 16.3 показан вариант рассмотренной схемы с применении блока ручного управления, вместо универсального переключателя и кнопочной станции.
Вкачестве блока ручного управления в системе использован БРУ-32, который с помощью переключателя S1 позволяет выбрать автоматический или ручной режим управления ИМ. При ручном режиме управление осуществляется кнопками S2 ("М") и S3 ("Б"). Светодиоды VD1 и VD2 служат для световой индикации направления движения двигателя ИМ (в сторону "М" или "Б"). О степени открытия клапана можно судить по показаниям прибора Р, который подключается к токовому преобразователю положения ПТ регулирующего органа.
Автоматический режим. В этом режиме работы САУ переключатель S1 устанавливают в положение "Авт.". Сигнал с одной из клемм (7 или 9) регулятора РП4-У через клеммы 6, 7 ("М") или 9,10 ("Б") БРУ и верхние контакты S1 поступает на один из входов ("М" или "Б") пускателя. Далее, как и на рис. 16.6.
Параллельно входам пускателя подключены светодиоды VD1 ("Б") и VD2 ("М"). При появлении сигнала на одном из входов пускателя появится сигнал на клеммах 29, 32 или 29, 33 БРУ-32 и загорится один из светодиодов "М" или "Б".
Ручной режим. При ручном режиме переключатель S1 переводят в положение "Ручн.". В этом случае на входы пускателя сигнал будет поступать от источника постоянного тока 24В при нажатии одного из штифтов ("Б" или "М") кнопок S2 и S3. Так, для дистанционного закрытия регулирующего органа нажимают штифт кнопки S2 (предварительно переключатель S1 переводят в положение "Ручн."). При этом положительный потенциал (+24В) через клемму 19 БРУ, верхний контакт кнопки S2 (штифт "М" нажат), клеммы 20 и 8, нижний контакт S1 и клемму 7 БРУ будет подан на вход "М" (клемма 7) пускателя.
60