

ТСА / Конспект лекций
.pdfБлок-контакты 1Б и 1М служат для предотвращения короткого замыкания в цепи двигателя. Так, при срабатывании катушки М ее якорь разомкнет контакт 1М в цепи катушки Б. Следовательно, даже при появлении напряжения на клеммах 2 и 3 катушка Б не включится, и ее контакт 2Б в цепи двигателя останется разомкнутым.
Контактные пускатели конструктивно просты, однако наличие контактов делает их малонадежными (частое включение и выключение контактов приводит к их подгоранию; загрязнение контактов может привести к неработоспособности контактора). Кроме того, при работе контакторы создают шум.
Бесконтактные реверсивные пускатели. В этих пускателях за счет использования бесконтактных полупроводниковых ключей достигается высокая надежность безотказной работы (средняя наработка на отказ - 200000 ч; срок службы - не менее 10 лет).
На рис. 11.2 показана электрическая схема бесконтактного реверсивного пускателя типа ПБР-2М1, предназначенного для управления однофазным двигателем ИМ с механическим тормозом.
На входные клеммы 8-7 или 8-9 пускателя подается напряжение 24 В постоянного тока с выхода регулятора. Причем, на клемму 8 (вход "Средний") подается положительный потенциал, а на клемму 7 (вход "М") или 9 (вход "Б") - отрицательный потенциал сигнала управления. Резисторы R1 и R2 задают входное сопротивление пускателя при малом уровне входного сигнала. Конденсаторы C1, C2 и диоды V2, V3 сглаживают пульсацию управляющего сигнала. Транзистор V8, резисторы R5, R6 и выпрямитель V9 исключают включение блокинггенератора при подаче сигнала на оба входа одновременно.
Рисунок 11.2
41
Блокинг-генероторы по каждому из входных сигналов ("Б" и "М") формируют импульсы управления симисторами V21 и V22 и состоят из транзисторов V15, V16, диодов V12, V13, V18, V19, трансформаторов II, Т2, конденсаторов С4, С5 и резисторов R8-R16.
Симисторы V21 и V22 коммутируют напряжение 220 В, от которого осуществляется питание ИМ. Дроссели LI, L2 ограничивают величину ударного тока при аварийных перегрузках симисторов.
Цепь дистанционного управления запитывается от трансформатора Т4 и выпрямителя VI. Вывод источника питания с отрицательным потенциалом соединен с клеммой 10 (выход "Д"), а с положительным - с клеммой 8 (выход
"Ср.").
При отсутствии входного сигнала симисторы закрыты. При подаче управляющего сигнала на клеммы 8-7 или 8-9 заряжаются конденсаторы С1 и СЗ или С2 и СЗ. Напряжение с конденсатора СЗ через выпрямитель V9 подается на вход эмиттерного повторителя V8, а с него - на вход одного из блокинггенераторов. Блокинг-генератор формирует импульсы, в обмотках 5,6 трансформаторов Т1 или Т2 наводится ЭДС, и симисторы V21 или V22 открываются. Питающее напряжение 220 В с клеммы 1 через открытые симисторы подается на выходные клеммы пускателя 3 или 5. Выходная клемма 4 соединена постоянно с клеммой 2 (вход 220 В).
Схема пускателя типа ПБР-2М2 (рис. 11.3) отличается от рассмотренной наличием третьего блокинг-генератора для управления обмоткой эл/магнитного тормоза ИМ, оборудованных таким тормозом.
При отсутствии управляющего сигнала симистор V23 закрыт и напряжение 220 В с клеммы 1 не поступает на клемму 6 (выход "Эм"). Обмотка тормоза обесточена, и двигатель ИМ заторможен. При появлении сигнала на клеммах 7-8 или 8-9 под действием импульсов, вырабатываемых блокинг-генератором VI7, симистор V23 открывается . На клемме б появляется напряжение 220 В, обмотка тормоза оказывается под напряжением. Якорь электромагнитного тормоза притягивается к сердечнику обмотки и вал двигателя растормаживается.
Наличие механического или эл/магнитного тормоза уменьшает выбег вала двигателя после снятия напряжения, что улучшает динамические свойства САУ (уменьшается перерегулирование).
42

Рисунок 11.3
Схема другой разновидности пускателя типа УИТБ (усилитель исполнительный, тиристорный, бесконтактный) показана на рис. 11.4.
Рисунок 11.4
Первичная обмотка Т2 включена в сеть 220 В, а две вторичные - через ключи, выполненные на тиристорах VD3 и VD4, подключены к первичным
43
обмоткам Т1. Когда на управляющие электроды тиристоров не подано напряжение с выхода регулятора (клеммы 5-6 или 6-7), тиристоры заперты, и к первичным обмоткам Т1 напряжение с вторичных обмоток Т2 не подается. При поступлении входного сигнала, например, на клеммы 6-7 отпирается VD3 и соответствующая обмотка Т1 получает питание. На вторичной обмотке при этом возникает напряжение 220 В, поступающее через клеммы 1-2 к ИМ. При поступлении сигнала на клеммы 5-6 отпирается VD4, фаза напряжения на выходе меняется на 180° и двигатель ИМ реверсируется.
Для исключения обратного напряжения на тиристорах последние включены в диагонали диодных мостов VD1 и VD2.
Дистанционное управление ИМ осуществляется путем шунтирования соответствующего тиристора с помощью кнопочной станции. С этой целью аноды тиристоров выведены на клеммы 3 и 4. Соединением через кнопки управления клеммы 3 с клеммой 7 или клеммы 4 с 5 вал ИМ вращается в нужном направлении При дистанционном управлении цепь автоматической работы (клеммы 5 и 7)
должна быть отключена.
12. Исполнительные механизмы.
Исполнительным механизмом (ИМ) в САУ называют устройство, предназначенное для перемещения регулирующего органа в соответствии с сигналом, поступающим от управляющего устройства. ИМ, следовательно, с помощью' регулирующего органа осуществляет непосредственное воздействие на управляемый объект.
Вобщем случае электрический ИМ состоит из электропривода, редуктора, конечных выключателей, группы сигнальных контактов, преобразователя узла жесткой обратной связи, преобразователя указателя положения регулирующего органа и тормоза.
Вкачестве электропривода в ИМ используются либо электромагниты, либо электродвигатели (одно - трехфазные) с понижающим редуктором для снижения скорости перемещения выходного вала ИМ до величины, обеспечивающей возможность соединения вала с регулирующим органом. Узел обратной связи предназначен для введения в контур регулирования пропорциональной составляющей, т.е. для формирования П-закона.
С помощью конечных выключателей производится отключение электропривода ИМ при достижении регулирующим органом своих конечных положений во избежание возможных повреждений механических звеньев, а также для ограничения перемещения регулирующего органа.
Группа сигнальных контактов используется в схемах блокировки и сигнализации. ИМ, являясь в САУ силовым устройством, производящим перемещение регулирующего органа, должен не только совершать необходимую для его перемещения работу, но и производить эти перемещения с возможно меньшими
искажениями заданных законов регулирования.
Сравнительный анализ и оценка соответствия ИМ условиям получения требуемого качества работы системы в целом производится путем сопоставления
44
не только энергетических, конструктивных и экономических показателей ИМ, но
иих статических и динамических характеристик.
Кчислу энергетических показателей ИМ относится номинальный момент (усилие) на валу ИМ - величина момента сопротивления или усилия, которое ИМ может преодолевать при номинальном значении управляющего (входного) сигнала. Момент на валу оценивается в Н*м, а усилие - в Н.
Статические и динамические свойства ИМ чаще всего оценивают его быстродействием, которое определяется по времени совершения валом ИМ полного оборота ил по времени полного перемещения штока ИМ (для ИМ электромагнитного типа). Быстродействие оценивается в секундах.
Одной из характеристик ИМ является величина хода вала ИМ. Она определяется долей полного оборота вала (для однооборотных ИМ величина полного оборота равна 1,0).
Основные показатели ИМ указываются обычно вместе с типом ИМ. Например, МЭО-4/100-0,25 - механизм электрический однооборотный, с моментом на валу 4 Н*м, временем полного хода вала (штока) 100 с, с величиной хода вала 0,25 (или 90°).
Величину момента на валу определяют в зависимости от значения момента, необходимого для перемещения регулирующего органа. Так, для поворотных заслонок момент на валу определяют по формуле
Mâ k M p MT ,
где Мр – реактивный момент, обусловленный стремлением потока препятствовать перемещению регулирующегооргана; Мт – момент трения в опорах; К=2 3 – коэффициент запаса;
M p 0,07 p*Dy3,
где р – перепад давления на регулирующем органе; Dy - условный (расчетный) диаметр регулирующегооргана.
MT 0,785Dy2 *Pu *r* ,
где Рu – избыточное давление среды перед регулирующим органом, r – радиус шейки вала регулирующего органа; =0,15 - коэффициент трения в опорах..
Электрические ИМ можно разделить на две группы: электромагнитные и электродвигательные. К первой группе относятся соленоидные электроприводы, предназначенные для управления регулирующими клапанами, вентилями, золотниками и т.п. К этой группе относятся ИМ с электромагнитными муфтами. Характерная особенность ИМ этой группы состоит в том, что необходимое для перестановки регулирующего органа усилие создается за счет электромагнита, являющегося неотъемлемой частью ИМ.
ИМ соленоидного типа обычно применяются в системах двухпозиционного регулирования.
Ко второй группе относятся электрические ИМ с электродвигателями и они, как правило, оборудуются электромагнитным тормозом. По назначению эти ИМ подразделяются на однооборотные (типа МЭО), многооборотные (типа МЭМ) и прямоходовые.
45
Выходной вал однооборотных ИМ может вращаться в пределах одного полного оборота. Такие механизмы характеризуются величиной номинального (крутящего) момента на выходном валу и временем его полного хода.
Выходной вал многооборотных ИМ может осуществлять перемещение в пределах нескольких оборотов (>360 ), и ИМ дополнительно характеризуется полным числом оборотов выходного вала.
Прямоходные ИМ имеют поступательное движение выходного штока и оцениваются усилием на штоке, величиной полного хода штока и временем его перемещения на участке полного хода.
Выбор исполнительных механизмов. Выбор типа ИМ, а также необходимого момента или усилия на его выходном валу определяется, в первую очередь, типом регулирующего органа, его нагрузочными характеристиками, настройкой и способом сочленения с ИМ. Выше был рассмотрен пример расчета момента на валу с учетом характеристик регулирующего органа и измеряемой среды.
Исходя из величины наибольшего момента или усилия, которые могут быть на регулирующем органе, выбирается ближайший по характеристикам ИМ, номинальный момент или усилие которого равны или больше статического момента (усилия) на регулирующем органе.
Существенным фактором, влияющем на выбор ИМ, является его надежность. Наибольшую надежность электрические ИМ имеют при бесконтактном управлении ИМ.
При выборе ИМ должны приниматься во внимание конструктивные особенности регулирующих органов, определяющие вид ИМ (многооборотный, однооборотный и др.), а также требования к исполнению ИМ (общепромышленное, пылеводозащищенное, тропическое и др.), вытекающие из условий их эксплуатации.
В некоторых случаях по условиям работы САУ бывает необходимо перемещать регулирующий орган до конечных положений. Для таких САУ необходимо выбирать ИМ, допускающие работу на упор, т.е. в режиме короткого замыкания. Современные ИМ типа МЭО, МЭМ и др. оборудованы электродвигателями типа ДАУ (двигатель асинхронный, допускающий работу на упор).
Электромагнитные ИМ. В САУ позиционного действия получили распространение электромагнитные приводы, преобразующие энергию электрического тока в поступательное движение регулирующего органа. Такие приводы, представляющие собой прямоходовой электромагнит с втягивающимся якорем, называют еще соленоидными.
Характерной особенностью этих ИМ является их способность работать в системах позиционного регулирования ("открыто", "закрыто"). Это объясняется тем, что регулирующий орган (клапан, вентиль) может находится в двух конечных положениях, соответствующих двум возможным положениям якоря сердечника электромагнита (ток включен, сердечник втянут и клапан открыт; ток выключен, сердечник опущен и клапан закрыт).
Электромагнитные ИМ отличаются простотой конструкции и схем управления, малым весом и размерами, надежны в эксплуатации. Однако для
46
создания необходимого усилия при перемещении большого и тяжелого регулирующего органа приходится значительно увеличивать рабочий ток катушек соленоида. В результате такие ИМ становятся громоздкими.
Электромагнитные ИМ обычно выпускаются на тяговые усилия от 4 Н до 100 Н и ходом штока от 6 мм до 30 мм.
Многооборотные ИМ. Автоматизация многих производственных процессов связана с необходимостью управлять различными запорными и регулирующими органами с винтовым шпинделем, требующими для своего оборота более одного оборота шпинделя. Наиболее широкое применение получили ИМ типа МЭМ. В качестве электропривода в этих ИМ используются трехфазные асинхронные двигатели на 220 В или 380 В. Кроме двигателя, в корпусе ИМ размещаются редуктор, конечные выключатели, сигнальные контакты, преобразователи обратной связи и указателя положения регулирующего органа, узел питания дистанционного указателя положения. Редуктор оборудован маховиком для ручного управления регулирующим органом и выключателем, предназначенным для выключения цепей питания электродвигателя при ручном управлении.
ИМ типа МЭМ выпускаются на номинальный момент на валу от 6,3 Н*м до 250 Н*м и время одного оборота выходного вала от 1с до 6,3с.
Однооборотные ИМ. Исполнительные механизмы, у которых угол поворота выходного вала не превышает 360°, называют однооборотными.
Из многообразия типов однооборотных ИМ в САУ получили распространение ИМ типа МЭК-К и МЭО.
ИМ типа МЭК-К выпускаются кривошипными и управляются через контактные электромагнитные пускатели (например, типа МКР-0-58 и др.). ИМ оборудуются одноили трехфазными двигателями на 220 В или 380 В. В состав МЭК-К входят те же узлы, что и в МЭМ. Эти ИМ выпускаются с номинальным моментом на валу от 0,63 кН*м до 10 кН*м и временем одного полного оборота выходного вала от 40 с до 250 с.
В современных САУ наибольшее распространение получили ИМ типа МЭО, отличающиеся высокой надежностью (благодаря использованию двигателя типа ДАУ), большим диапазоном номинальных моментов и временем полного хода выходного вала (момент лежит в диапазоне 16 Н*м 10 кН*м; время полного хода - (10 360) с), малым весом и габаритными размерами, возможностью установки в любом положении, отсутствием ограничения по продолжительности и частоте включения, широкой номенклатурой типоразмеров с высокой степенью взаимной унификации.
Все ИМ, независимо от области их использования в различных АСУТП, оборудованы однофазными асинхронными конденсаторными двигателями, рассчитанными на 220 В, могут управляться как от бесконтактных, так и контактных пускателей и имеют единую принципиальную электрическую схему
(рис. 12.1).
Электрическую часть ИМ составляет двигатель М, конечные выключатели S1 и S2, группа сигнальных контактов S3 и S4, индуктивный L1 или резистивный R1 (рис. 12.1,б) преобразователь узла обратной связи, индуктивный L2 или резистивный R2 преобразователь указателя положения регулирующего органа.
47
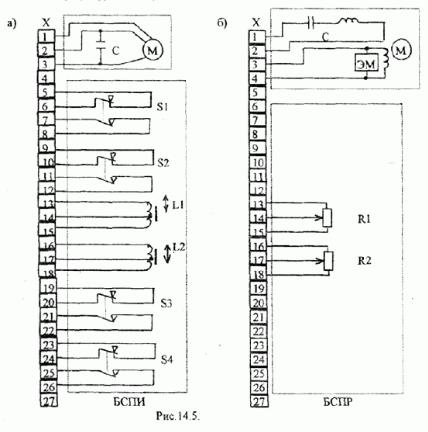
Рисунок 12.1
При подаче управляющего сигнала на клеммы 1,2 вал ИМ вращается в одну сторону, на клеммы 1,3 - в обратную сторону. В ИМ применены блоки БСПИ с индуктивными преобразователями или блоки БСПР - с резистивными преобразователями. Плунжеры L1 и L2 либо ползунки R1 и R2, также как контакты S1-S4, кинематически связаны с выходным валом ИМ и, таким образом, могут менять свое положение при повороте вала. На валу блоков БСПИ или БСПР закреплены кулачки, с помощью которых осуществляется срабатывание микропереключателей S1-S4 с последующим удержанием их в этом положении при угле поворота вала до 90° или до 240°. Кулачок можно устанавливать в пределах указанного диапазона углов путем их поворота на валу блока БСПИ или БСПР. Для поворота кулачков (или одного из них) необходимо отвинтить контргайку и, после поворота кулачка на необходимый угол, вновь затянуть ее.
На рис. 12.2 показана схема расположения кулачков, позволяющая размыкание конечных выключателей S1 и S2 при повороте вала ИМ на 90°, т.е. от полного открытия до полного закрытия регулирующего органа (поворотной заслонки, например). На рис. 12.2 выключатель S2 разомкнут (регулирующий орган находится в одном из крайних положений), a S1 замкнут. При повороте вала 1 двигателя ИМ против часовой стрелки на 90° кулачок 2 через шток 3 разомкнет выключатель S1 (второе крайнее положение регулирующего органа); при этом выключатель S2 замкнется.
48
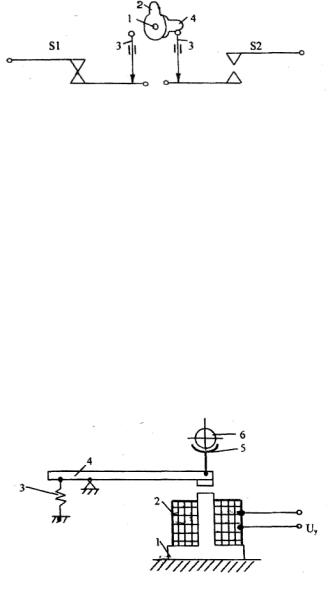
Рисунок 12.2
Для ограничения величины выбега регулирующего органа (уменьшения перерегулирования в САУ) при исчезновении управляющего сигнала, недопущения возникновения в системе незатухающих колебаний ИМ типа МЭО могут быть снабжены электромагнитным тормозом, схема подключения катушки ЭМ которого показана на рис. 12.1,б.
Тормоз (рис. 12.3) представляет собой обычное электромагнитное реле. При отсутствии управляющего сигнала Uy, поступающего от пускателя, катушка 2 обесточена. Якорь 4 притянут к сердечнику 1. Под действием пружины 3 якорь поворачивается против часовой стрелки. При этом башмак 5 прижимается к валу 6 ИМ, затормаживая его. В случае появления управляющего сигнала якорь притягивается к сердечнику 1. башмак отходит от вала и последний растормаживается.
Рисунок 12.3
13 Аппаратура дистанционного управления
Устройства дистанционного управления предназначены для ручного выбора режима работы САУ (например, режим «АВТ.», «ДИСТ.», «УВМ» и др.) и дистанционного управления исполнительными механизмами. К аппаратуре дистанционного управления относятся: кнопочные станции, универсальные переключатели и ключи дистанционного управления. Эти устройства выполняются как в виде отдельных элементов, так и конструктивно совмещенными в общем корпусе (блоки ручного управления БРУ). С помощью устройств дистанционного управления осуществляется дискретная коммутация электрических цепей.
13.1 Кнопочные станции
49
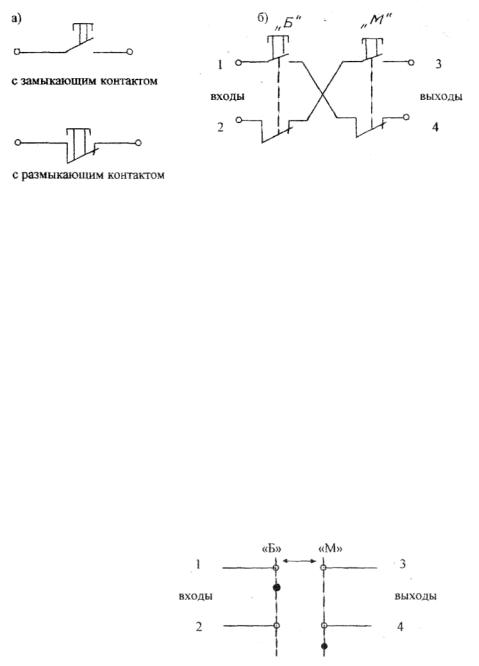
По числу коммутируемых цепей станции бывают однодвух- и трехштифтовые. На рис. 13.1 показано обозначение кнопок в электрических цепях: а-одноштифтовой; б-двухштифтовой.
Рисунок 13.1
Одноштифтовые кнопки используются в схемах сигнализации (кнопка снятия звукового сигнала). Двухштифтовые - для дистанционного (ручного) управления ИМ,
Для коммутации цепи 1,4 (рис. 13.1,б) следует нажать штифт «Б» («больше»). При этом нижний контакт (блок-контакт) штифта «Б» разомкнется и, следовательно, не произойдет коммутации цепи 2,3 при ошибочном нажатии на штифт «М». Цепь 2,3 коммутируется путем нажатия штифта «М»; при этом цепь 1,4 блок-контактом «М» разрывается.
13.2 Ключи управления
Для дистанционного управления исполнительными механизмами, вместо кнопок, часто используются ключи управления, электрическое обозначение которых показано на рис. 13.2.
Рисунок 13.2
Количество положений ключа на схеме изображают вертикальными пунктирными линиями (на рис. 13.2 таких положений два - «Б» и «М»). Зачерненная точка на линии указывает, что в положении «Б» рукоятки ключа коммутируется цепь 1,3; в положении «М» - цепь 2,4. Двойная стрелка ( ) обозначает, что ключ с самовозвратом, т.е. при отпускании рукоятки она возвращается в исходное (нейтральное) положение; при этом цепи 1,3 и 2,4 разрываются.
) обозначает, что ключ с самовозвратом, т.е. при отпускании рукоятки она возвращается в исходное (нейтральное) положение; при этом цепи 1,3 и 2,4 разрываются.
50