

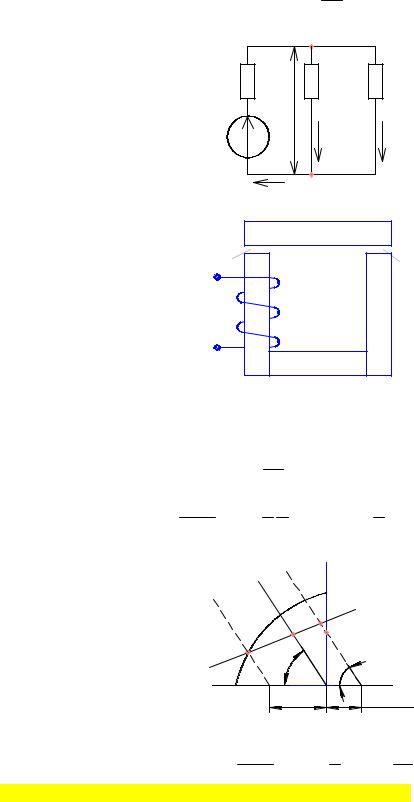
Схема замещения:
Fу – МДС управления
|
|
|
|
|
R |
= |
l |
|
|
|
|
|
||
|
|
|
|
|
|
вн |
|
|
ρS |
|
|
|
|
|
|
|
|
Râí |
|
Uì |
|
|
|
Rs |
|
RdS |
|
|
|
|
|
|
|
|
|
|
|
Fs |
|
Fd |
|
|
|
|
|
|
Fô |
|
|
|
|
|
|
|
|
|
|||
|
|
|
Fsïmax |
|
|
|
|
|
|
|
|
|||
|
|
|
d1 |
|
|
|
|
|
|
|
d1 |
|
|
|
|
|
Fó |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
Нl + Нδ δ = Fу |
|
|
|
|
|
||||
|
|
|
|
|
В δ = Fу − Нl |
|
|
|
|
|
||||
|
μ0 Fу |
|
|
μ0 |
|
|
|
|
|
|
|
|
|
|
В = |
− Нμ |
|
l S |
= |
В |
у |
− НG |
l |
= В |
у |
− Нtgα |
|
||
δ |
|
|
δ S |
|
|
|||||||||
|
|
|
0 |
|
|
δ S |
|
|
1 |
|||||
|
|
|
d |
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
À1 |
À2 |
|
Âó |
|
|
|
|
|
|
|
|
|
A3 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
Íó <0 |
|
Íó >0 |
|
|
|
||||
|
|
|
H |
|
|
|
|
|
|
|||||
0 = μ0δFу − Нуμ0 δl ; Ну = Flу
§3. Принцип действия и типы поляризованных механизмов.
Поляризованные механизмы обладают повышенным быстродействием, а также повышенной чувствительностью.
Классификация поляризованных механизмов: 1. По конструктивной схеме:
1) поляризованные ЭММ с последовательной магнитной цепью, в которых и поляризующий, и управляющий магнитные потоки идут по одному пути.
Недостатки поляризованных ЭММ с последовательной магнитной цепью:
a)в поляризованных ЭММ с последовательной магнитной цепью управляющий магнитный поток проходит по постоянному магниту, а, значит, возможно размагничивание постоянного магнита и нарушение стабильности работы при изменении положения точки отхода;
80
b)у постоянного магнита большое магнитное сопротивление, т.о. необходимо обеспечить значительную величину МДС управления, т.е. большие габариты катушки управления.
Ðñ
F |
+ d1 |
Ð |
d1 - |
ó |
(-) |
|
(+) |
Fï
N S
Поляризующий поток можно создавать не только постоянными магнитами, но и дополнительной намагничивающей обмоткой, что чаще всего и делают.
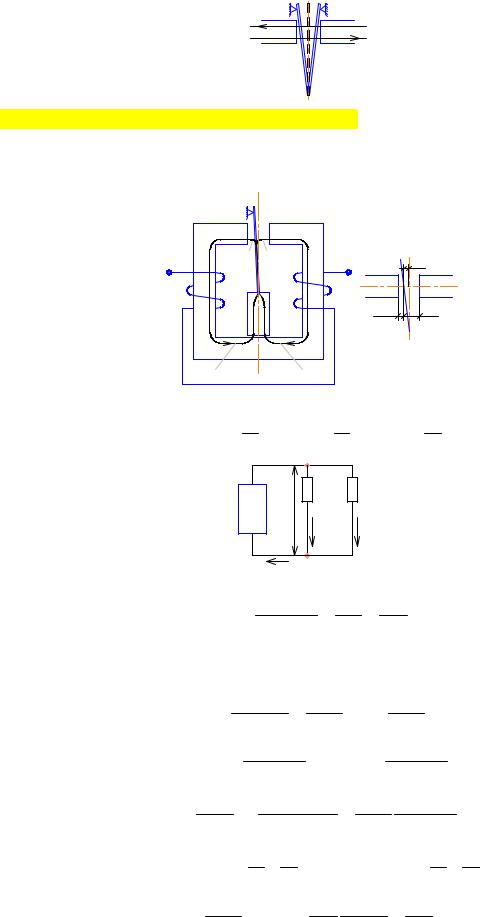
2) поляризованные ЭММ с параллельной магнитной цепью
óïîð
Fó |
d1 |
d2 |
|
N |
|
S |
Fï1 |
Fï2 |
Φδ1 = Φп1 + Φу ; Φδ2 = Φп2 − Φу
3)поляризованные механизмы мостикового типа, в которых изменение положения якоря происходит за счёт перераспределения потоков.
2.По числу устойчивых состояний:
1)двухпозиционные поляризованные ЭММ с преобладанием, в которых якорь занимает две позиции, но после исчезновения возмущения якорь приходит в определённое состояние
àâ
Fó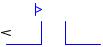

2)двухпозиционные поляризованные ЭММ без преобладания:
àb
Fó
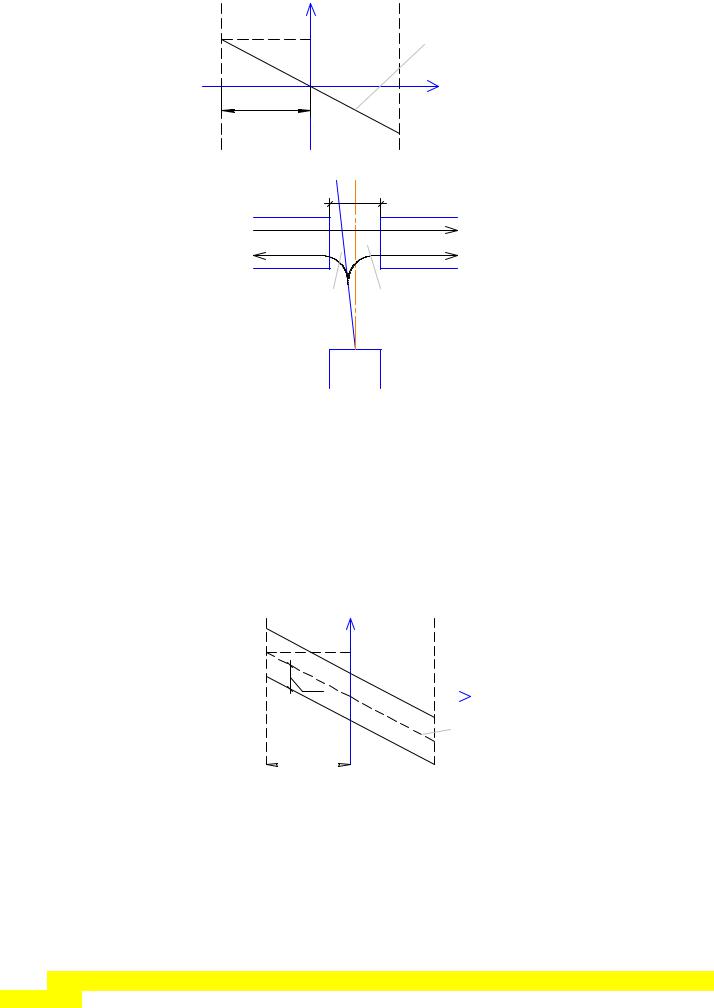
3)трёхпозиционные поляризованные ЭММ, в которых для удержания якоря в нейтральном положении с необходима дополнительная сила. Нейтральное положение является преобладающим
81
à c b
Fó
F'ó
§4. Тяговые характеристики поляризованных ЭММ.
Применим принцип наложения, т.е. определение возможной величины силы от каждой составляющей с дальнейшим анализом.
1) Fу = 0
|
|
|
|
|
|
d1 |
|
|
d2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
||
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d1 |
|
|
|
|
d2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fï1 |
|
|
|
|
|
|
|
|
|
|
|
|
Fï2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
δ2 |
−δ1 = 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
G |
|
= μ |
0 |
S |
|
+ G |
кр |
≈ μ |
0 |
S |
; G ≈ |
μ |
0 |
S |
|
|
|
|
||||||||||||||
|
δ1 |
|
|
δ1 |
|
|
|
|
|
|
|
|
δ1 |
δ2 |
|
|
|
δ2 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
Gd1 |
|
Gd |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Ud |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
S |
|
|
|
|
|
Fï1 |
|
Fï2 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
Fï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uδ = |
Gδ |
|
Φп |
|
|
= |
Φп1 = |
Φп2 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
+ Gδ |
2 |
|
Gδ |
1 |
Gδ |
2 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Φп |
≈ const |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
P = P1 − P2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
P |
= |
|
|
Φ |
2 |
|
|
|
|
|
= |
|
Φ |
2 |
|
P = |
Φ2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
п1 |
|
|
|
|
|
|
п1 ; |
|
|
п2 |
|
|
|
|
|
|
|||||||||
|
|
1 |
|
|
2μ0 Sσв21 |
|
|
2μ0 S |
1 |
|
2μ0 S |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Φп1 = Φп Gδ |
Gδ1 |
|
|
|
|
; Φп2 = Φп Gδ |
Gδ2 |
|
|
|
|
|
||||||||||||||||||||
+ Gδ |
2 |
+ Gδ |
2 |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||
|
|
1 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
Φп2 Gδ1 |
−Gδ2 |
|
|
||||||||||
P = |
|
|
Φ |
2 |
|
Gδ1 |
−Gδ2 |
)2 = |
|
|
||||||||||||||||||||||
2μ0 S |
п |
|
(Gδ1 + Gδ2 |
2μ0 S Gδ1 |
+ Gδ2 |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
||||
Gδ1 −Gδ2 |
|
|
|
|
|
|
− |
|
|
; Gδ1 +Gδ2 |
= μ0 S |
|
+ |
|
||||||||||||||||||
|
= μ0 S |
|
|
|
|
|
|
|
|
δ |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
δ1 |
|
|
δ2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
δ2 |
||||||||
P = |
|
Φ |
2 |
|
δ |
|
− |
δ |
|
|
= |
|
Φ2 |
|
|
|
= |
Φ |
2 |
|
|
|
|
|
||||||||
|
|
п |
|
|
|
2 |
|
|
|
|
1 |
|
|
п |
|
|
|
|
|
п |
|
|
|
|
|
|||||||
|
|
2μ0 S δ2 +δ1 |
|
|
|
μ0 S δ2 +δ1 |
|
|
μ0 S δ |
|
|
|
||||||||||||||||||||
δ= δ1 +δ2
=var
82
Ð
типичное Ðíà÷ неустойчивое
состояние
Dí D
2) Fу ≠ 0
|
d |
|
Fó |
Fï1 |
Fï2 |
d1 d2
N
S
Φ1 = Φп1 − Φу ; Φ2 = Φп2 + Φу
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Φу = FуGΣ = Fу |
μ0 S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
(Φп1 − Φу )2 |
|
|
|
|
|
|
|
|
|
|
δ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
P = P1 − P2 = |
|
|
− |
(Φп2 + Φу )2 |
= |
|
|
|
|
|
1 |
|
(Φп21 − 2Φп1Φу + Φ2у − Φп22 − 2Φп2 Φу − Φ2у ) |
|
||||||||||||||||||||||||||||||||||||||||||||||
|
2μ0 S |
|
|
|
|
2μ0 S |
|
|
|
|
|
2μ0 S |
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Gδ1 |
|
|
|
|
|
|
|
|
|
|
|
Gδ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Φп1 = Φп |
|
|
|
|
|
|
|
|
|
; Φп2 |
|
= Φп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Gδ |
|
+ Gδ |
2 |
|
|
|
Gδ |
1 |
|
+ Gδ |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
P = |
1 |
|
Φ2 |
δ |
|
−δ |
|
|
|
|
|
δ |
|
|
+δ |
|
|
|
|
|
1 |
Φ2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
Φ2 |
|
|
F |
1 |
= P |
− Р |
|
|||||||||||||||||
|
|
|
2 |
|
1 − 2Φ |
|
|
Φ |
|
|
2 |
|
|
|
1 |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− 2Φ |
|
Φ |
|
= |
п |
|
− Φ |
|
|
|
|
|||||||||||||||||
|
|
|
δ |
|
|
|
|
|
|
δ |
|
|
|
|
|
|
|
|
|
|
|
|
δ |
|
μ0 S δ |
|
у δ |
|
||||||||||||||||||||||||||||||||
|
2μ0 S |
п |
|
|
|
п |
|
у |
|
|
|
|
|
|
2μ0 S |
|
п |
|
|
|
|
|
|
|
п |
|
|
у |
|
|
|
п |
|
п |
|
у |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fó2 >0 |
|
|
|
|
|
|
Ð |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ðïíà÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ðó |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dí |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ðï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fó1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рп − Ру |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
≤ 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
P − Р |
|
|
= |
|
Φп2 |
|
|
|
− Φ |
|
F |
|
1 |
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
μ0 S δ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
у |
|
|
|
|
|
|
|
|
п |
|
у δ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
уср |
|
|
= |
|
|
Φп |
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
μ0 S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Для улучшения чувствительности (уменьшения Fуср) нужно либо уменьшать величину |
н, либо |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
увеличивать сечение S.
Тема 8. Методы теории поля в МС
§1. Основные уравнения электромагнитного поля. Общая характеристика методов решения уравнений поля.
83

Методы теории цепей имеют определённую область ограничения.
К методам теории поля относятся все методы, учитывающие пространственность. Дифференциальные уравнения Максвелла для магнитного поля:
rotH = jΣ divB = 0
B = μH ; μ = μr μ0
Дифференциальные уравнения Максвелла для электрического поля: rotEr = − ∂∂Bt
divD = σ ,
где σ – объёмная плотность заряда
D = εE ; ε = εr ε0
Вместе уравнения Максвелла для электрического и магнитного полей образуют систему уравнений Максвелла для электромагнитного поля в неподвижной среде.
|
|
|
|
|
|
|
r |
|
r |
|
∂ |
|
|
∂ |
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
divH = H |
= |
|
H x + |
|
|
H y |
+ |
|
H z |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
∂x |
∂y |
∂z |
|
|
|
|
|
|
|
|
||||||||||||||||
r |
r |
|
ir |
|
rj |
|
kr |
|
r |
∂H |
|
|
∂H y |
|
∂H |
|
|
∂H |
|
|
r |
∂H |
|
|
∂H y |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
∂ |
|
∂ |
|
∂ |
|
|
|
r |
|
|
|
|
|
|
||||||||||||||||
rotH = [ H ]= |
|
|
|
|
|
|
|
|
|
|
|
z |
− |
|
|
|
− j |
|
|
z |
− |
|
x |
|
|
|
x |
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
∂x |
|
∂y |
|
∂z |
|
= i |
∂y |
|
∂z |
|
|
∂x |
|
∂z |
|
+ k |
∂y |
|
∂x |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
H x |
H y |
H z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
По локальным величинам |
|
B, H , E, D определяются интегральные величины Φ,U м , E,U эл ,i . |
|||||||||||||||||||||||||||||
Особенности расчёта: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1) ограниченность рассмотрения объёма взаимодействующих тел. Область рассмотрения реальных задач:
[0 ÷∞]
Для каждой конкретной задачи принимаются граничные значения, т.е.:
[0 ÷ хпред ]
2) скачкообразность изменения параметров среды Система уравнений Максвелла для электромагнитного поля в неподвижной среде не использует-
ся в реальных методах теории поля и является теоретической моделью. Существует три подхода:
1. Переход от системы уравнений Максвелла к уравнениям Лапласа и Пуассона.
Е = −gradϕ ,
где φ – скалярный потенциал
В = rotA ,
где A – векторный потенциал
Н = −gradϕм
divD = div(εE)= div(−εgradϕ)= −εdiv(gradϕ)= −ε 2ϕ = ρ ,
где ρ – локальный заряд (объёмный или поверхностный) Уравнение Пуассона:
2ϕ = − ερ
Уравнение Лапласа:
2ϕ = 0
Уравнения для магнитного поля. При j ≠ 0 :
2 A = −μJ
84
При j = 0 :
2 A = 0
Для уравнений с векторным магнитным потенциалом число уравнений не сокращается. При Jr = 0 :
2ϕм = 0
ρ
2ϕм = − μм
Введение дополнительных зарядов (условных магнитных зарядов) позволяет говорить о понятии скалярного магнитного потенциала φм для вихревого магнитного поля.
Порядок решения задач теории поля: 1)
ϕ = f (x; y; z); A = f (x; y; z)
2)
B, H , E, D = f (x; y; z)
3) Br, H , E, D → Φ,U м , Е,i,...
4)
Р= f (x; y; z)
2.Преобразование системы уравнений Максвелла в расчётную модель, т.е. использование фундаментальных решений для точечных зарядов в однородной среде.
N q |
|
V |
|
j |
|
rNQ |
|
|
dV |
Q |
|
rQN |
|
|
|
r |
Q' |
Q |
|
|
|
|
|
|
|
|
|
|
|
ϕ = |
|
q |
|
|
|
|
4πεr |
|
|
||
|
|
|
NQ |
|
|
Er = −gradϕ = |
|
q |
rr |
||
|
|
|
4πεr 2 |
0 |
|
dϕQ |
= |
ρdV |
|
|
|
|
|
4πεr0 |
|
|
|
ϕ = ∫dϕQ
V
Er = −V∫4ρπεdVr 2 rr0
r |
JdV |
|
ρм |
r |
H = −V∫ |
|
= |
|
r0 |
4πr 2 |
4πμr 2 |
В некоторых случаях для эквивалентирования векторов надо вводить фиктивные токи:
jп = j + jфикт
Порядок решения задачи аналогичен первому подходу. 3. Использование вариационных методов. Применяется три расчётные математические модели.
Полная система уравнений относительно тех или иных параметров поля, выраженных в форме дифференциальных либо интегральных соотношений, допускающих численное определение основных векторов поля, называется математической моделью поля.
Методы решения уравнений поля:
1) метод сеток (метод конечных разностей), основанный на первом подходе;
85

2)метод конечных элементов, основанный на вариационных методах;
3)метод вторичных источников (метод интегральных уравнений), основанный на втором подходе.
Вышеперечисленные методы используются для решения многих задач физики (в аэродинамике, в строительстве и во многих других областях).
Методы решения уравнений поля могут быть применимы для стационарного состояния магнитного поля.
§2. Скалярный потенциал магнитного поля. Замена токов эквивалентными магнитными лепест-
ками.
Скалярный потенциал вводится только для потенциальных полей. Признак потенциальности – циркуляция вектора:
∫Mdl = 0
l |
|
|
|
|
Ê |
|
dS |
Ws |
i |
|
|
+sì |
À |
d=h |
|
|
|
-sì |
 |
H |
непроницаемый |
|
|
"кожух" |
|
|
Ωs – полный телесный угол
d → 0 ∫Hdl = i
l
∫B Hrdlr =ϕмА −ϕмВ ≈ i
A
Непроницаемый "кожух" заряжается условным магнитным зарядом.
Требуется определить возможную величину объёмной плотности заряда σм по заданному значению тока i. Задача решается применением электростатической аналогии (применение задачи диполя).
|
|
|
|
Q |
|
|
+q |
r1 |
K |
|
|
|
||
|
|
h |
r |
r2 |
|
|
|
|
|
|
|
-q |
|
r2 -r1 |
|
|
|
x |
|
ϕ |
эК |
= + q |
+ − q = q(r2 − r1 ) |
|
|
4πε0 r1 |
4πε0 r2 4πε0 r1r2 |
||
|
|
|||
r2 − r1 ≈ x ; x = h cos Θ ,
где h – плечо диполя
r1r2 ≈ r 2
ϕ |
эК |
= |
qh cos Θ |
Момент диполя: |
|
4πε0 r 2 |
|
|
|
||
|
p = qh |
||
|
|
||
86