172 Законы сохранения
стояния в нулевое (в нашем опыте — при перемещении гири с высоты h на по-
верхность стола). Эта работа и определяет потенциальную энергию сис-
темы: |
|
|
|
|
а |
|
|
|
Еп = Авз. |
|
|
(1) |
|
|
|
|
|
Для системы «тело массой m + Земля» силой взаимодействия является сила |
r |
|
|
|
|
т |
|
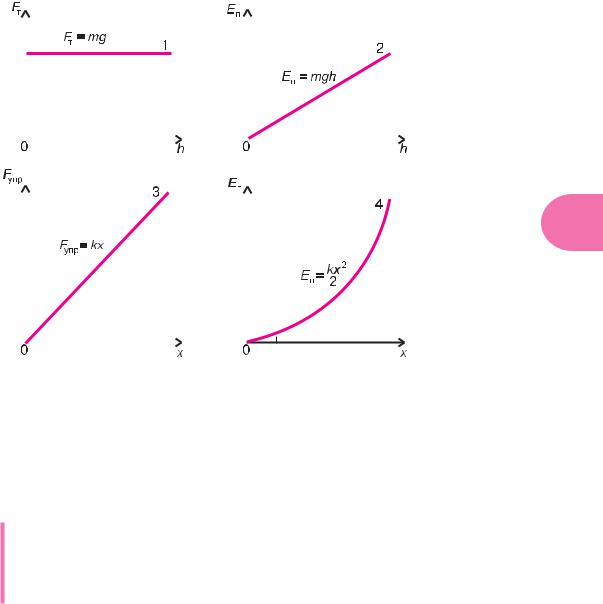
тяжести mg. |
Работа этой силы при перемещении тела с высоты h |
на нулевой |
уровень равна mgh. Значит, потенциальная энергия такой сис емы: |
|
|
|
Eп = mgh. |
|
в |
|
(2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
Выражение (2) совпадает с формулой работы н шн й силы по подъему тела |
на высоту h (см. § 30). Это совпадение не лучайно. Какаяеработа необходима для |
|
|
а |
|
|
|
подъема тела (см. рис. 238, а), такую работу о ершит ила тяжести при возвращении этого тела обратно (см. рис. 238, б).
Пользуясь формулой (2), надо иметь в виду, что:
• если тело нельзя считать матери льной точкой, то под h следует понимать высоту, на которой находится его центр т жести;
• формула применима только для высот h, малых по сравнению с радиусом
Земли. |
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
«потенциальной энер- |
Для краткости энергию |
mgh допустимо называть |
гией тела» (не забывая, что |
|
с ямом деле она принадлежит системе «тело + |
+ Земля»). |
|
|
д |
|
|
|
|
|
|
|
|
|
Определим теперь поте циальаую энергию упруго деформированной пружи- |
|
|
о |
елать |
овых расчетов. В § 30 было доказано, что работа |
ны. Для этого не на о |
внешней силы, не бх |
имая |
ля деформации пружины, |
равна |
kx2 |
2 . Значит, по- |
|
р |
|
|
|
|
|
|
|
|
|
|
|
тенциальная энергия пружины: |
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
Е |
= |
kx2 |
. |
|
|
(3) |
|
|
|
|
|
|
|
п |
2 |
|
|
|
НФормула (3) определяет потенциальную энергию любого упругого тела при деформ циях сж тия или растяжения.
Формулы (2) и (3) отличаются друг от друга, хотя они описывают одну и ту же физическую величину — потенциальную энергию. Причина различия формул (2) и (3) состоит в том, что сила тяжести постоянна (график 1 на рис. 239), а сила упругости изменяется при деформировании (график 3). Поэтому на рисунке 239 различаются и графики соответствующих потенциальных энергий: наклонная прямая 2 и участок параболы 4.
Правообладатель Народная асвета
Потенциальная энергия |
173 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
я |
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
обусловлена взаимо ействием тел или частей тела; |
|
|
|
|
|
• зависит от взаимн го расстояния между телами (или частями тела); |
|
• |
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
равна работе сил взаим ействия (т. е. внутренних сил системы) при пе- |
реходе |
|
|
а |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
левого |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• если внутренние силы системы совершают положительную работу (Авз * 0), |
то ее потенциальная энергия уменьшается;
• увеличение потенциальной энергии происходит, когда внешние силы, преодолевая внутренние, совершают положительную работу (Авнеш * 0).
взаимодействия при переходе системы из начального состояния в нулевое. Но такой переход можно совершить различными способами.
Правообладатель Народная асвета
174 Законы сохранения
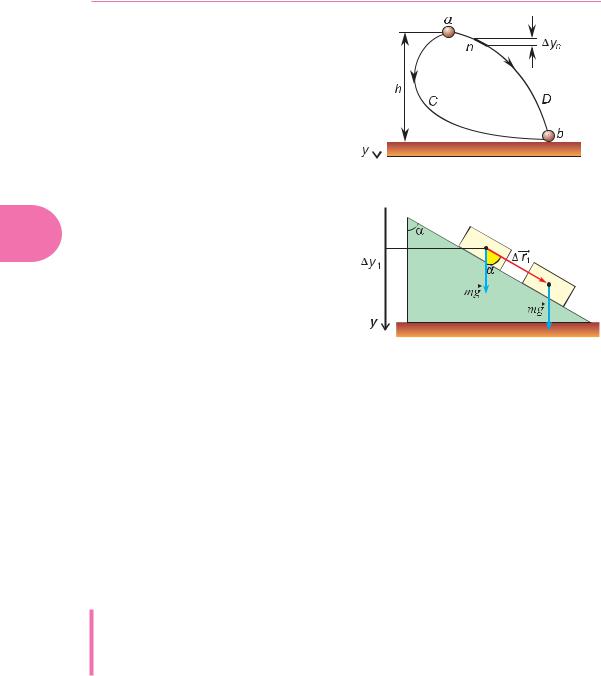
Например, шарик массой m мож- |
|
|
|
|
|
|
|
|
|
|
но переместить из точки a в точку b как |
|
|
|
|
|
( ) |
|
|
|
по траектории C, так и по траектории D |
|
|
|
|
|
а |
(рис. 240). В обоих случаях работа силы |
|
|
|
|
|
|
|
тяжести должна равняться потенциаль- |
|
|
|
|
|
|
|
ной энергии начального состояния mgh. |
|
|
|
|
|
|
|
Значит, эти работы должны быть равны |
|
|
|
|
|
|
|
между собой: AC = AD. |
|
|
|
|
|
|
|
|
|
|
|
|
Сделаем вывод. |
|
Потенциальную |
|
|
|
|
|
|
|
энергию можно вводить только для |
|
|
|
|
|
|
|
Рис. 240 |
|
т |
сил, работа которых не зависит от |
|
способа перехода из одного состоя- |
|
|
|
|
|
|
|
|
|
е |
|
|
|
ния в другое. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Такие силы называются консерва- |
|
|
|
в |
|
|
|
|
|
тивными (или потенциальными). Кон- |
|
|
|
|
|
|
|
|
сервативны и сила тяжести, и сила упру- |
|
|
|
|
|
|
|
|
а |
с |
|
|
|
|
|
|
гости. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Убедимся, |
что сила тяжести |
кон- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сервативна. Рассмотрим тело массой m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
на |
наклонной |
плоскости, |
сост вля- |
Рис. 241 |
|
|
|
|
|
|
ющей угол α с вертикалью (рис. |
241). |
|
|
|
|
|
|
При |
перемещении |
|
тела |
r |
|
я |
|
|
|
|
|
|
|
|
|
|
|
r1 |
р бота |
|
|
|
|
|
|
|
|
|
|
силы тяжести равна А1 = mg |
r1 cos α. Так как r1 cos α = |
y1, то при любом угле |
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
наклона работа рав а А1 = mg y1, т. е. |
работе по перемещению тела по вер- |
тикали. |
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вернемся к рисунку 240. Выделим на траектории D один из малых участ- |
ков, например n-ный. Работа силы тяжести на этом участке равна mg yn, а ра- |
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
бота на всей т аект рии равна сумме таких работ, т. е. mgh. Этот результат |
получится и для т аектории C, |
и для любой траектории, |
соединяющей заданные |
точки (a и b на |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ис. 240), что и требовалось доказать. |
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Существуют и силы, работа которых зависит от формы траектории, например |
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сила трения скольжения, сила сопротивления движению тел в газе или жидкости. Такие силы называют диссипативными.
Убедимся в том, что сила трения диссипативна. Переместим книгу по поверхности стола из точки а в точку b по двум траекториям (C и D) разной длины (рис. 242, вид сверху). Работы сил трения, прямо пропорциональные пройденным путям, будут различными.
Правообладатель Народная асвета

Потенциальная энергия |
|
|
|
|
|
|
|
|
|
175 |
Отличие консервативных сил от дис- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
сипативных проявится еще нагляднее, |
|
|
|
|
|
|
|
|
|
|
если сравнить их работы на замкнутом |
|
|
|
|
|
|
|
|
а |
пути. Работа консервативной силы на |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
любом замкнутом пути будет равна нулю, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а диссипативной — отлична от нуля (до- |
|
|
D |
|
|
|
|
|
|
|
|
кажите эти утверждения на примерах |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
силы тяжести и силы трения). |
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рассмотрим еще два свойства потен- |
|
|
|
|
в |
|
|
Рис. 242 |
циальной энергии. |
|
|
|
|
|
|
трша мой силой |
|
|
|
|
|
|
|
|
1. Изменение потенциальной энергии равно работе, со |
взаимодействия, взятой со знаком «минус». |
|
|
|
|
|
|
|
|
|
|
Например, при движении тела массой m вниз |
|
ы оты h1 до высоты h2: |
Авз = mg(h1 – h2 ) * 0; |
|
|
а |
|
= –Авз |
|
|
|
|
Еп = mgh2 – mgh1 |
+ 0. |
|
|
|
Равенство |
я |
|
|
с |
|
|
|
|
|
|
Еп =–Авз |
|
|
|
|
(4) |
выполняется для всех видов потенциальной энергии. |
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
2. Нулевой уровень потенциальной энергии можно выбрать произвольно.
Значение потенциальной энергии з висит от выбора нулевого уровня. На-
равная разности значений потенциальнойн энергии (см. формулу (4)). Ясно, что эта разность от выбора нулев го ур вня не зависит (докажите это самостоятельно). В
пример, если перенести нулевой уровень с поверхности стола на уровень пола,
то для любого тела на рису ке 238 поте ци льная энергия увеличится на mgH,
где m — масса этого тела, H — высота стола. Однако в любой задаче представля-
каждом конкретн м случаеодего выбирают так, чтобы задачу было проще решать.
ет интерес не потенциальная э ергия сама по себе, а работа сил взаимодействия,
Главные выводы
1. Потенци льн я эне гия характеризует способность сил взаимодействия
механической системы совершать работу. Она зависит от расстояния между |
|
|
р |
|
|
|
|
|
а |
|
|
|
|
|
Н |
|
|
|
|
|
взаимодействующими телами (либо частями одного тела). |
|
|
2. |
Потенциальная энергия равна работе сил взаимодействия, совершае- |
мой при переходе системы из данного состояния на нулевой уровень. |
|
|
3. |
В случае силы тяжести E |
п |
= mgh, в случае силы упругости E = |
kx2 |
. |
|
|
|
|
п |
2 |
|
4. |
|
|
|
|
|
Если работа силы не зависит от способа перехода системы из начально- |
го состояния в конечное, то сила называется консервативной, а если зависит, то диссипативной.
Правообладатель Народная асвета
176 Законы сохранения
Контрольные вопросы
1. В каких случаях система тел обладает потенциальной энергией?
2. Как определить потенциальную энергию любой системы? От чего она зависит?
3. |
Чему равна потенциальная энергия системы «тело + Земля»? |
а |
|
4. |
Чему равна потенциальная энергия упругой деформации? |
|
5. Какие силы называются консервативными, а какие — диссип тивными? Приведите |
примеры тех и других. |
|
Недеформированную |
|
длины |
|
- |
ниюпружины, работусилыупругостииизменениепот нциальнойетэнергиипружины.
Дано: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение |
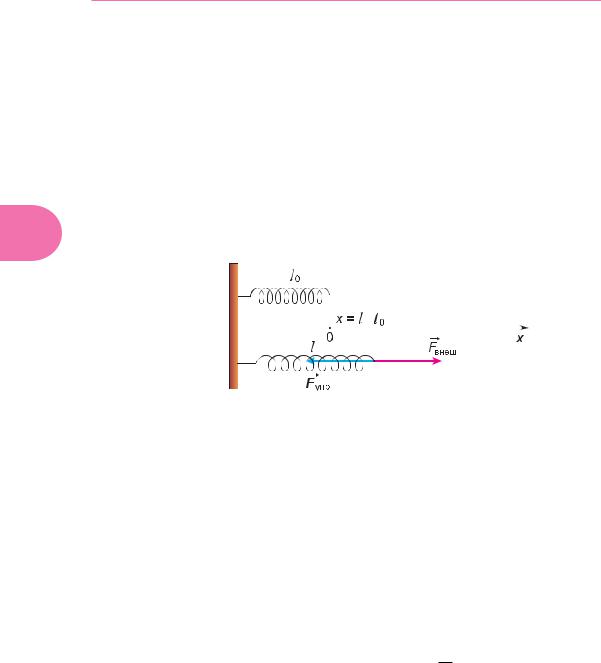
l0 = 16 см = 0,16 м |
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
Сделаем рисунок к задаче (рис. 243). |
l = 20 см = 0,20 м |
|
|
|
|
|
|
я |
|
|
|
с |
k = 200 Нм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Aвнеш — ? |
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
Aупр — ? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Eп — ? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
0 |
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
Рис. 243 |
|
|
о |
|
|
|
|
|
kx2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
Из рисунка следует: x = l − l . |
Работа внешней силы: |
A |
|
. |
|
|
|
|
|
|
|
|
|
внеш |
|
2 |
|
|
|
|
|
|
|
0 |
Тогда |
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k(l − l ) |
2 |
|
200 |
Н 1,6 10−3 м2 |
а |
Aвнеш = |
|
= |
|
|
|
|
|
|
|
|
|
|
|
= 0,16 Дж. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р бота силы уп угости: Aупр = −Aвнеш = −0,16 Дж. |
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Eп = Aвнеш = 0,16 Дж. |
Изменение потенциальной энергии: |
|
Р бота внешней силы пошла на увеличение потенциальной энергии пружины.
Ответ: Aвнеш = 0,16 Дж; Aупр = −0,16 Дж; Eп = 0,16 Дж.
Упражнение 24
1. Определите массу камня, при медленном подъеме которого из ямы глубиной h = 2,0 м на поверхность совершена работа А = 100 Дж. В задачах 1 и 2
ускорение свободного падения принять равным g = 10 м .
с2
Правообладатель Народная асвета
Кинетическая энергия. Полная энергия системы тел |
177 |
2. Железный лом массой m = 12 кг и длиной l = 1,5 м лежит на горизонтальной поверхности. Найдите минимальную работу, которую необходимо совершить, чтобы поставить лом вертикально.
3. В результате растяжения пружины на l = 8,0 см она приобрела потенци-
боту с работой сил упругости пружины и с изменением ее пот нциальнойтаэнергии. 

 5. Как следует изменить расстояние между электрич ски заряж нными ша-
5. Как следует изменить расстояние между электрич ски заряж нными ша- 
 риками (уменьшить или увеличить его), чтобы пот нциальная энергия си-
риками (уменьшить или увеличить его), чтобы пот нциальная энергия си-
альную энергию Еп = 0,32 Дж. Определите жесткость пружины. |
4. Недеформированнаяпружинажесткостьюk = 20 |
Н |
поддействиемвнешней |
|
|
|
см |
силы удлинилась на |
l1 = 3,0 см. Определите работу, которую должна совершить |
внешняя сила, чтобы удлинить эту пружину еще на l2 = 2,0 см. Ср вни е эту ра- |
стемы возросла? Ответьте на этот вопрос для каждого случая, показанного на ри- |
сунке 244, |
е |
а, б, в. Подсказка: для этого нет необходимо ти знать формулу для по- |
тенциальной энергии взаимодействия электриче ких зарядов. Достаточно опре- |
|
|
|
|
|
|
в |
|
|
делить, в каком случае работа внешних сил будет положительной. |
|
|
|
|
|
|
с |
|
|
|
|
|
а |
|
|
|
Рис. 244 |
|
|
|
|
|
|
§ 32. Кинетическая энергия. Полнаяя |
|
|
|
|
энергия системы тел |
Из 7-го класса вы знаете, что, кроме потенциальной энергии, суще- |
|
|
а |
|
|
|
|
|
|
ствует и кинетическая. Что такое кинетическая энергия? Как она свя-
зана со скоростью тела? С его массой? |
|
|
|
н |
|
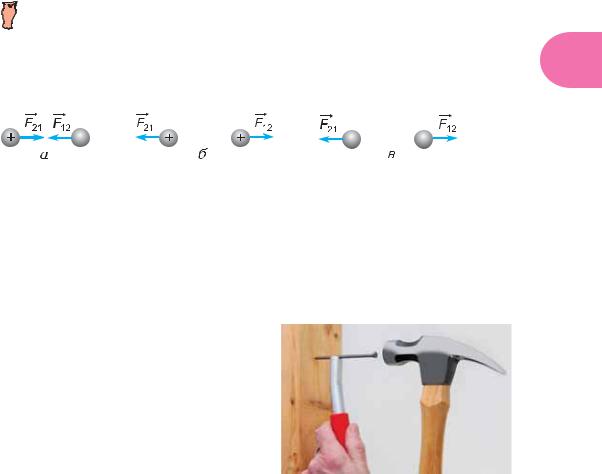
Обратимсякизвестнымпримерам. Молотокзабиваетвдоскугвоздь(рис. 245). |
|
д |
|
Пуля, попав в де евянный кубик, пере- |
|
мещает его (см. ис. 222). Движущийся |
|
|
|
о |
|
|
вагон, ст лкив ясь с покоящимся, сжи- |
|
мает буферные пружины (см. рис. 149). |
|
В этих примеррх работу совершали |
|
силы, действующие со стороны движущих- |
|
а |
|
|
|
ся тел (молотка, пули, вагона). Значит, |
|
движущиеся тела обладают способностью |
|
совершать работу. Меру этой способности |
|
называют кинетической энергией. |
|
Н |
|
|
|
А как тело приобретает кинетическую |
|
|
энергию? В результате работы, произве- |
Рис. 245 |
Правообладатель Народная асвета
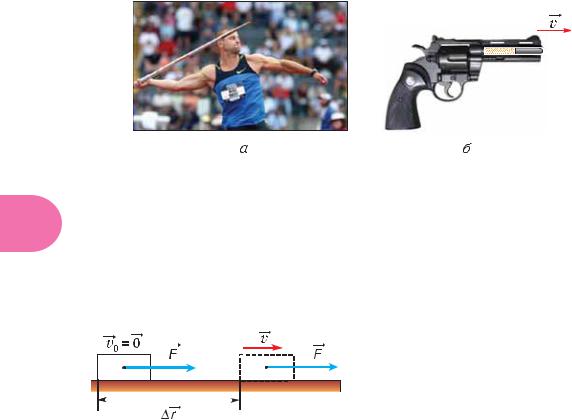
денной над ним. При толкании ядра, метании молота или копья (рис. 246, а) ра- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
боту совершает мускульная сила спортсмена. Работу, необходимую для разгона |
пули, совершает сила давления пороховых газов (рис. 246,еб) и т. д. |
|
|
Чем больше работа, |
|
|
|
|
|
|
а |
|
|
|
совершенная над телом, тем ильнее оно разгонится и |
тем боЂльшую кинетическую энергию приобретет. в |
|
|
|
Кинетическую энергию определяют к к величину, равную работе, ко- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
я |
|
|
|
|
торую необходимо совершить, чтобы р зогн ть тело из состояния покоя |
до данной скорости: |
|
|
|
|
Eк = Aразг. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
Найдем эту работу. Пусть тело |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
рез |
|
|
|
|
|
|
|
|
рез |
массой m разгоняется до скорости v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
из состояния покоя под действием сил, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
результирующая |
которых Fрез посто- |
|
|
|
|
|
|
о |
|
|
|
|
|
|
янна (рис. 247). Тело будет двигаться |
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
равноускоренно, а работа по разгону |
Рис. 247 |
|
|
|
|
|
тела равна: |
|
|
|
|
|
|
|
|
Aразг = Fрез r, |
(2) |
|
|
|
а |
|
|
|
где r |
|
|
|
v2 |
|
|
|
|
|
|
|
|
— модуль пе емещения тела. При таком движении квадрат модуля ско- |
рости связ н с модулем перемещения (см. § 13) формулой: |
|
|
Н |
|
|
|
|
|
|
|
|
|
|
v2 = 2a r. |
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Из |
|
равенств |
(2) и |
(3) |
|
с учетом |
второго закона |
Ньютона получим: |
Aразг = Fрез r = ma |
r = m |
|
. |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
Значит, кинетическая энергия тела равна половине произведения массы |
тела и квадрата модуля его скорости: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E = |
mv2 |
. |
|
(4) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Правообладатель Народная асвета

Кинетическая энергия. Полная энергия системы тел |
179 |
Кинетическая энергия — величина скалярная. Она зависит от модуля скорости, но не зависит от ее направления. Измеряется кинетическая энергия в тех же единицах, что и работа (в СИ — в джоулях).
|
А на что пойдет работа сил, приложенных к телу, если его начальная ско- |
|
r |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рость v0 |
≠ 0? Работа пойдет на изменение кинетической энергии тела: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
mv2 |
− |
mv2 |
|
= A . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
е |
|
(5) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
рез |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
кин тич ской энергииа. |
|
|
Формула (5) выражает теорему об изменении |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в2 |
|
|
|
|
Изменение кинетической энергии тела равно работе р зультирующей всех |
сил, приложенных к нему. |
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
Теорему легко доказать для тела, движущего я прямолинейно |
направлении |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
а |
|
|
|
|
|
|
действующей на него постоянной силы F. |
С помощью формулы из кинематики |
2 |
2 |
|
|
|
|
2 |
2 |
|
|
F |
|
|
|
|
|
|
mv2 |
|
mv0 |
|
|
|
v |
= v |
|
+ 2 a |
r |
получаем: |
v |
− v |
= 2 |
|
|
|
r. |
Отсюда |
|
|
− |
|
= F |
r = A . |
|
|
0 |
|
|
|
|
|
0 |
|
|
m |
я |
|
|
|
2 |
|
2 |
|
рез |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Теорема об изменении кинетической энергии верна и при криволинейном |
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
движении, и при непостоянной результирующей силе. |
|
|
|
|
|
|
|
В формулах (1) и (5) работу можно понимать и как работу результирующей |
|
|
|
|
|
|
|
|
н |
лгебр ическую сумму работ, |
совершенных |
всех сил, приложенных к телу, и к к |
каждой из этих сил. |
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Работа результирующей силы может быть положительной, отрицательной |
или равной нулю. Из теоремы об изме е ии кинетической энергии следует. |
|
|
1. Если Арез * 0 (например, работа силы тяжести, действующей на свободно |
падающее вниз тело), то кинетическая энергия тела увеличивается. |
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Если Арез + 0 (например, работа силы трения скольжения), то кинетичес- |
кая энергия тела уменьшается. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. Если А |
|
= 0, то кинетическая энергия не изменяется. Так бывает не только |
при |
r |
|
r |
ез |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
Fрез |
|
= 0. Кинетическая энергия не изменяется и в случае, когда сила Fрез пер- |
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пендикулярнааскорости движения тела (как, например, сила, создающая центростремительное ускорение при движении тела по окружности).
Кинетическая энергия зависит от выбора системы отсчета. Например, кинетическая энергия пассажира, покоящегося относительно вагона, равна нулю в системе отсчета «вагон» и отлична от нуля в системе отсчета «Земля».
Формула (4) определяет кинетическую энергию поступательно движущегося тела. Если тело вращается, то к ней следует прибавить кинетическую энергию вращательного движения. Она пропорциональна квадрату угловой скорости вращения тела.
Правообладатель Народная асвета
180 |
|
|
|
|
|
|
|
|
|
|
|
|
Законы сохранения |
|
|
|
|
|
Мы рассмотрели потенциальную и кинетическую энергии. |
|
|
|
|
А как определить полную энергию системы тел? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рассмотрим пример. Пусть падающий мячик массой m |
|
|
|
|
в некоторый момент времени находится на высоте h и имеет |
|
|
|
|
скорость |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v (рис. 248). Чему равна полная энергия системы |
|
|
|
|
«Земля + мячик»? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Найдем сумму |
кинетической |
и потенци льной энергий |
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
данной системы (считая Землю неподвижной): |
|
|
|
|
|
|
|
|
|
|
|
|
|
mv2 |
|
а |
|
|
|
|
|
|
|
|
Eмех = Eк |
+ Eп = |
|
2 |
|
+ mgh. |
|
(6) |
Рис. 248 |
|
Мы получили величину, которую называютт |
«механичес- |
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
кой энергией системы». Найдена ли полная энергия системы |
|
|
|
|
«Земля + мячик»? Нет. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
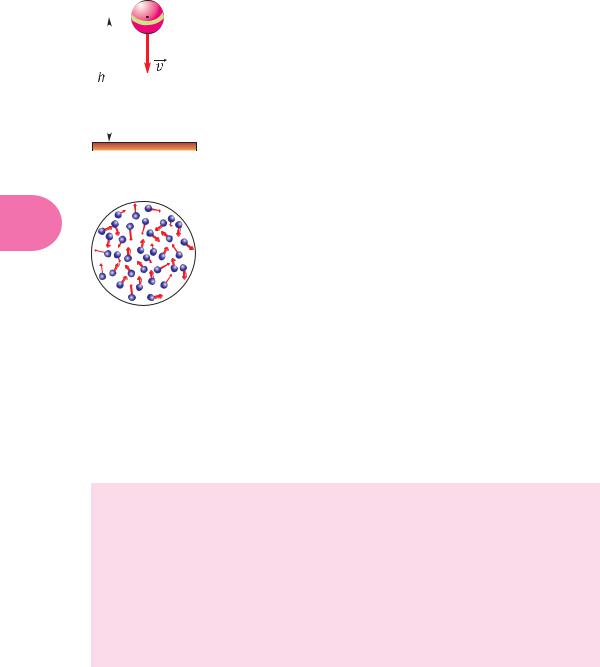
о тоят из микрочастиц — |
|
|
|
|
|
Как вы уже знаете, в е тела |
|
|
|
|
|
атомов, молекул. Эти ч |
тицы вуча твуют в хаотическом теп- |
|
|
|
|
ловом движении (рис. 249) и вз имодействуют (притягивают и |
|
|
|
|
|
|
|
я |
|
|
|
|
|
|
|
|
|
|
|
|
|
отталкивают друг друга). Сумма кинетической энергии тепло- |
|
|
|
|
вого движения микрочастиц и потенциальной энергии их взаи- |
Рис. 249 |
|
модействия друг с другом называется внутренней энергией |
|
тела. Зн чит, полн |
энергиясистемы«Земля + мячик» равна: |
|
|
|
|
|
н |
|
Eполн = Eмех + Eвнутр, |
|
|
(7) |
|
|
|
|
|
|
|
|
|
|
где Eвнутр есть сумма в утре |
их э ергий Земли и мячика. |
|
|
|
|
|
Таким образом, ля любойасистемы тел: |
|
|
|
|
|
|
|
|
|
|
• механическая э ергия системы есть сумма кинетических энергий тел |
системы и п тенциальных энергий их ваимодействий; |
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
механической |
энергии |
|
|
• полная |
энергия системы складывается из ее |
и суммы внутреннихдэнергий тел системы. |
|
|
|
|
|
|
|
|
|
|
Главные выводыо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Кинетическая энергия тела прямо пропорциональна его массе и ква- |
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
др ту скорости его движения. |
|
|
|
|
|
|
|
|
|
|
|
2.аЗначение кинетической энергии зависит от выбора системы отсчета. 3. Изменение кинетической энергии равно работе результирующей всех
сил, приложенных к телу.
4. Механическая энергия системы есть сумма кинетических энергий тел системы и потенциальных энергий их ваимодействий.
5. Полная энергия системы складывается из ее механической энергии и суммы внутренних энергий тел системы.
Правообладатель Народная асвета