

Fizika_Isachenkova_9_rus_2015
.pdfПеремещение, координата и путь при равнопеременном движении |
|
|
61 |
||||||||||||||
ходит потому, чтоrв момент времени |
|
|
|
|
|
|
|
|
|
||||||||
tп скорость тела v = 0, а направле- |
|
|
|
|
|
|
|
|
|
||||||||
ние движения тела изменяется на |
|
|
|
|
|
|
|
а |
|||||||||
противоположное (см. график 2 на |
|
|
|
|
|
|
|
||||||||||
рис. 88, а также рис. 85). Моменту |
|
|
|
|
|
|
|
||||||||||
времени tп на графике 2* соответ- |
|
|
|
|
|
|
|
||||||||||
ствует вершина параболы. |
|
|
|
|
|
|
|
|
|
||||||||
А каким будет график пути? |
|
|
|
|
|
|
|
||||||||||
Для движения, при котором на- |
|
|
|
|
|
|
|
||||||||||
правление скорости не изменя- |
|
|
|
|
|
|
т |
|
|||||||||
ется, график пути совпадает с |
|
|
|
|
|
|
|
||||||||||
графиком проекции перемещения |
|
|
|
|
|
е |
|
|
|||||||||
(рис. 90, графики 1а и 1б). Если |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
в |
|
|
|
||||||||||
же скорость меняет свое направ- |
|
|
|
|
|
|
Рис. 90 |
||||||||||
ление, то эти графики совпадают |
|
|
|
|
|
|
|||||||||||
лишь при 0 + t + tп (см. рис. 90, |
графики 2 и 2б). После момента поворота |
||||||||||||||||
tп проекция перемещения начинает уменьш ться, |
с |
|
|
|
|
||||||||||||
путь продолжает расти. Он |
|||||||||||||||||
увеличивается на столько, на сколько за то же время уменьшается проекция |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
перемещения. Графики пути изображены на рисунке 90 штриховыми линиями. |
|||||||||||||||||
Так как координата x = x0 + |
rx, |
то гр фик координаты получается из графика |
|||||||||||||||
проекции перемещения смещением на |x0| (вверх при х0 * 0 или вниз при х0 + 0). |
|||||||||||||||||
На рисунке 91 сплошная ли ия — |
|
я |
|
|
|
|
|
|
|
||||||||
а |
|
|
|
|
|
|
|
||||||||||
это график rx, линия 1+ — график |
|
|
|
|
|
|
|
||||||||||
координаты |
при |
х0 = 80 см, |
|
ли- |
|
|
|
|
|
|
|
|
|
||||
ния 1− — график коор инаты при |
|
|
|
|
|
|
|
|
|
||||||||
х0 = −80 см. |
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
||
Скорость |
при |
равн перемен- |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
||
ном движении линейно зависит от |
|
|
|
|
|
|
|
|
|
||||||||
времени. А как зависит ско ость от |
|
|
|
|
|
|
|
|
|
||||||||
перемещения? |
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Выразим |
|
время |
из |
фор- |
|
|
|
|
|
|
|
|
|
||||
мулы |
(1): |
|
р |
Подста- |
|
|
|
|
|
|
|
|
|
||||
t = vx |
− v0x . |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
ax |
|
|
|
|
|
|
|
|
|
|
|
|
|
вив t |
|
а |
(2), |
получим: |
|
|
|
|
|
|
|
|
|
||||
в равенство |
|
|
|
|
|
|
|
|
|
||||||||
r = v0x + vx |
vx − v0x . |
|
|
|
|
|
|
|
|
|
|
|
|
||||
x |
2 |
|
ax |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Следовательно, |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
= |
v2 |
− v2 |
|
|
(5) |
|
|
|
|
|
|
|
|
|
|
|
x |
|
0x , |
|
|
|
|
|
|
|
|
|
|
|
|||
|
x |
|
2ax |
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 91 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Правообладатель Народная асвета |
|
|||||||||||||
62 Кинематика
откуда |
= v2 |
+ 2a |
|
|
|
v2 |
x |
r . |
(6) |
||
x |
0x |
|
x |
|
Формула (6) показывает: при равнопеременном движении квадрат скорости линейно зависит от перемещения.
Отметим, что при движении с постоянным ускорением соотношения, имею- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
т |
|
|
щие вид (1) и (3), выполняются не только для проекций, но и для векторов: |
|
|||||||||||
|
|
|
r |
r |
|
r |
|
|
е |
а |
|
|
|
|
|
v = v0 |
+ at; |
|
|
|
|
(7) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
r |
|
r 2 |
|
|
|
|
||
|
|
|
r |
= v t |
+ |
at |
. |
|
|
|
|
(8) |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
0 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
||
Формулы (7) и (8) справедливы и для прямолин йного, и для криволинейного |
||||||||||||
r |
uuuuuur |
|
|
|
|
|
|
|
|
|
||
движения при a |
= const. |
|
|
|
|
|
|
|
|
|
||
Главные выводы |
|
а |
в |
|
|
|
||||||
|
|
|
|
|
|
|
||||||
|
ая |
|
|
|
|
|
|
|
|
|||
1. При равнопеременном движении перемещение и координата движуще- |
||||||||||||
гося тела — квадратичные функции времени. |
|
|
|
|
|
|||||||
2. Графики зависимости проекции перемещения и координаты от времени |
||||||||||||
для равнопеременного движения вл ются участками парабол. |
|
|||||||||||
3. Вершина параболы на гр фике проекции перемещения соответствует |
||||||||||||
моменту времени, при котором мгновенная скорость равна нулю. |
|
|||||||||||
1.Как, используяографикдпроекции перемещения при равномерном движении, получить график эт й величины ля равнопеременного движения?
2.Как зависятрперемещение и координата от времени при равнопеременном движении?
3.Как, зная г афик пр екции перемещения, получить график координаты? Что еще приаэтом надо знать?
4.В к ком случае г афики проекции перемещения и координаты совпадают?НШарику н
желоба длиной l = 100 см (рис. 92), сообщили начальную скорость, направленную вдоль наклонного желоба вверх. Ее модуль v0 = 40 cсм . Ускорение шарика
направлено вдоль желоба вниз. Модуль ускорения а = 20 cм. Найдите координа-
с2
ту точки поворота и время, за которое шарик ее достигнет. Определите момент
Правообладатель Народная асвета
Перемещение, координата и путь при равнопеременном движении |
|
|
|
63 |
|||||||||||||||||||||||
времени t2, когда шарик вернется в точ- |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
ку А, и момент времени t3, когда шарик |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
окажется в нижней точке О желоба. По- |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
стройте графики проекций скорости, пе- |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
ремещения, а также график координаты |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
шарика за время от начала движения до |
|
|
|
|
|
|
|
|
|
|
Рис. 92 |
||||||||||||||||
момента времени t3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
||||||||||
Дано: |
|
|
|
|
|
|
|
|
|
|
Решение |
|
|
|
|
|
|
||||||||||
l0 = 100 cм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
Сделаем рисунок к задаче (см. рис. 92). Р шим задачу графически. |
|||||||||||||||||||||||||
v0 = 40 cм |
|
|
Выберем ось Oх, как показано на рисунке. Тогдатпро кция ско- |
||||||||||||||||||||||||
|
|
|
|
|
с |
рости v |
|
= v |
|
− at, проекция перемещения |
|
|
= v t − at2 |
, коорди- |
|||||||||||||
а = 20 |
cм |
x |
0 |
|
r |
||||||||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
0 |
2 |
|
|
||||||
с |
ната x = x |
|
+ v t − at2 , |
|
|
= 0,5l |
|
= 50 |
|
е |
= 40 |
cм , |
|||||||||||||||
|
|
|
|
|
|
где x |
0 |
0 |
|
м, |
v |
= v |
|||||||||||||||
x0 = 50 см |
|
|
|
|
0 |
0 |
|
2 |
|
|
|
|
в |
0x |
0 |
|
с |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|||
t1 — ? |
|
|
= −a = −20 cм. По этим формул м н йдем значения v и |
||||||||||||||||||||||||
|
|
x |
|
|
|
|
с2 |
|
|
|
|
|
|
с |
|
|
|
|
x |
x |
|||||||
t |
2 |
— ? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
для моментов времени t = 0; 1,0 c; 2,0 с; 3,0 с; 4,0 с; 5,0 с и зане- |
||||||||||||||||||||||
t3 — ? |
|
сем результаты в таблицу. |
|
|
а |
|
|
|
|
|
|
|
|||||||||||||||
x1 — ? |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
t, с |
|
|
|
0 |
|
|
|
1,0 |
|
|
2,0 |
|
|
3,0 |
|
|
|
4,0 |
|
5,0 |
|
|||
|
|
v |
, |
cм |
|
|
40 |
|
|
|
20 |
|
|
0 я |
−20 |
|
|
−40 |
|
−60 |
|
||||||
|
|
x |
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rx, см |
|
|
0 |
|
|
|
30 |
|
|
40 |
|
|
30 |
|
|
|
|
0 |
|
−50 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
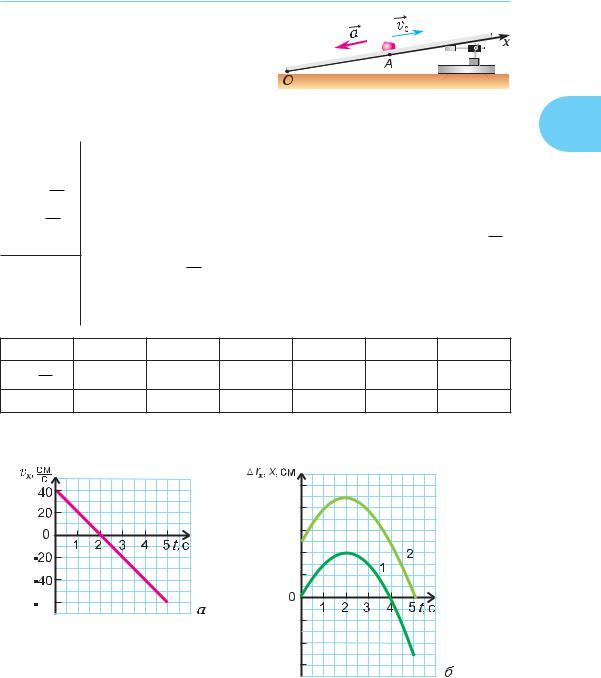
Используя полученные значения, строим графики проекций скорости (рис. 93, а) |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и перемещения (рис. 93, б, график 1) за промежуток времени от 0 до 5 с. |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
100 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
80 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
р |
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
-20 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
-40 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-60 |
|
|
|
|
|
|
|
|
Рис. 93 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Правообладатель Народная асвета |
|
|
|||||||||||||||||
64 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Кинематика |
||
График |
координаты |
получим, сдвинув график |
|
проекции перемещения на |
||||||||||||
x0 = 50 см вверх (см. рис. 93, б, график 2). Из графиков и таблицы находим: ко- |
||||||||||||||||
ордината точки поворота x1 = 90 см; шарик достиг ее в момент t1 = 2,0 с; в точ- |
||||||||||||||||
ку А шарик вернулся в момент t2 = 4,0 с, |
|
а в точке |
О оказался |
в |
момент |
|||||||||||
t3 = 5,0 с. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Ответ: t1 = 2,0 с; t2 = 4,0 с; t3 = 5,0 с; x1 = 90 см. |
|
|
|
|
|
|
|
|
||||||||
Упражнение 8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1. Тележка съезжает с вершины наклонной плоскос и за врамя t = 4,0 с, дви- |
||||||||||||||||
гаясь с постоянным ускорением, модуль которого а = 20 |
см. |
Начальная скорость |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
с2 |
т |
|
|
|
||
тележки равна нулю. Определите длину наклонной плоскости. |
|
|
|
|||||||||||||
2. Электровоз, подходя к станции со |
коро тью, модулье |
которой v = 20 м , |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
начинает тормозить и через время t = 1,0 мин о танавливается. Определите тор- |
||||||||||||||||
мозной путь электровоза. С каким средним у корениемвдвигался электровоз? |
||||||||||||||||
3. Проекция скорости шарика, движущегося по прямолинейному желобу, за- |
||||||||||||||||
|
|
|
|
|
|
с |
cм , |
В = 2,0 cм. |
Определите |
|||||||
висит от времени по закону: v = А + Bt, где А = 10 |
|
|||||||||||||||
|
|
|
|
x |
а |
|
с |
|
|
|
с2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
проекциюначальнойскоростиипроекциюускоренияшарика. Найдитезависимость |
||||||||||||||||
проекции перемещения |
rx ш рика от времени. Найдите значения vx и |
rx в момент |
||||||||||||||
времени t = 6,0 с. Постройте гр фики проекций скорости и перемещения шарика. |
||||||||||||||||
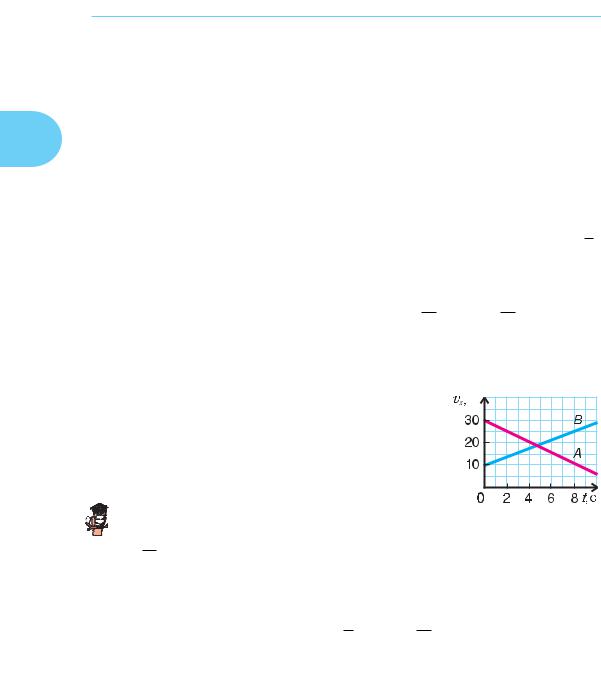
4. По графикам проекции скоростия |
прямолиней- |
|
м |
|
|
|
|
|||||||||
но движущихся тел А и В (рис. 94) постройте графики |
|
|
|
|
|
|||||||||||
|
с |
|
|
|
|
|||||||||||
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
проекций их ускорения и перемеще ия. Охарактеризуй- |
|
|
|
|
|
|
|
|||||||||
те эти движения. Чему равно отношение путей, прой- |
|
|
|
|
|
|
|
|||||||||
денных каждым тел м к м ментам времени t |
1 |
= 4,0 с и |
|
|
|
|
|
|
|
|||||||
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
t2 = 8,0 с от начала движения? Запишите кинематиче- |
|
|
|
|
|
|
|
|||||||||
ский закон движениядкажд го из тел, если x0 = 0. |
|
|
|
|
|
|
|
|
|
|||||||
5. Подъемный к ан поднимает груз из состояния |
|
|
|
|
|
|
|
|||||||||
покоя с постояннымо |
ускорением, модуль которого |
|
|
|
|
|
|
Рис. 94 |
||||||||
а = 0,3 |
|
м . |
К к относятся пути, проходимые грузом за 1, 2, 3 и 4-ю секунды |
|||||||||||||
|
|
с2 |
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
движения? Подтвердите ответ графиком зависимости модуля скорости движения |
||||||||||||||||
груза от времени. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
6. Кинематический закон движения брошенной вверх металлической дробин- |
||||||||||||||||
ки имеет вид: у = At − Bt |
2, где А = 20,0 м |
, В = 5,0 |
м . Определите путь, модуль |
|||||||||||||
|
|
|
|
с |
|
|
|
с2 |
|
|
|
= 1,0 с, t |
|
= 2,0 с и |
||
перемещения и координату дробинки к моментам времени t |
1 |
2 |
||||||||||||||
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
t3 = 3,0 с от начала движения. Постройте графики зависимости от времени про- |
||||||||||||||||
екций ускорения и скорости, координаты дробинки, модуля перемещения и пути. |
||||||||||||||||
Правообладатель Народная асвета
Криволинейное движение. Линейная и угловая скорости |
|
|
|
|
65 |
||||||||
§ 14. Криволинейное движение. |
|
|
|
|
|
|
|
||||||
Линейная и угловая скорости |
|
|
|
|
|
|
|
||||||
|
Мы изучили прямолинейное движение — равномерное и равнопе- |
||||||||||||
ременное. |
Однако |
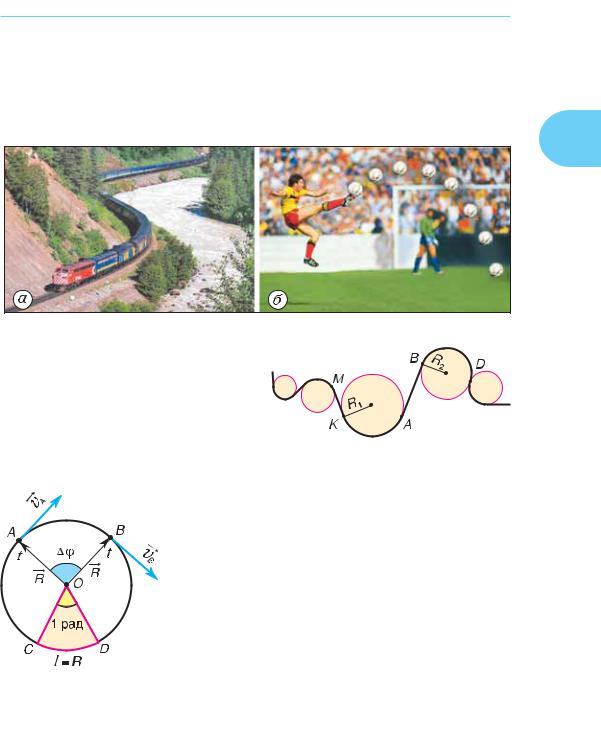
криволинейное движение |
встречается |
гор здо ч ще |
|||||||||
(рис. 95, а, б). Каковы закономерности такого движения? |
|
а |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
||
|
|
|
|
|
|
|
|
с |
|
|
|
||
|
|
|
|
|
|
|
а |
|
|
|
|
Рис. 95 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Пусть тело движется по криволи- |
|
|
|
|
|
|
|
|||||
нейной траектории, изображенной на |
|
|
|
|
|
|
|
||||||
рисунке 96. Ее (как и любую другую) я |
|
|
|
|
|
|
|
||||||
можно приближенно разбить а прямо- |
|
|
|
|
|
|
|
||||||
линейные участки (МK, АВ, …) и ауги |
|
|
|
|
|
|
|
||||||
окружностей (KА, BD, …) соответствую- |
|
|
|
|
|
|
Рис. 96 |
||||||
щих радиусов. |
|
|
н |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кинематику прямолинейного движения мы уже |
|||||||
|
|
|
|
|
|
дизучили. Рассмотрим теперь движение тела (прини- |
|||||||
|
|
|
|
|
|
мая его за материальную точку) по окружности ради- |
|||||||
|
|
|
|
|
оусом R (рис. 97). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Двигаясь по траектории, в каждый момент време- |
|||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
r |
|
1 |
|
|
|
|
ни тело имеет мгновенную скорость v. |
При рассмот- |
|||||||
|
|
|
р |
||||||||||
|
1 |
|
|
2 |
|
рении движения по окружности ее принято называть |
|||||||
|
|
а |
|
линейной скоростью. |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
Н |
|
|
Чтобы охарактеризоватьr положение движущего- |
||||||||
|
|
|
|
ся тела, проведем вектор |
R |
из центра окружности |
|||||||
|
|
|
|
в ту точку траектории, где в данный момент находит- |
|||||||||
|
|
|
|
|
|
|
|
|
r |
|
|
||
|
|
|
|
|
|
ся тело (см. рис. 97). Вектор |
|
R называют радиус- |
|||||
Рис. 97 |
|
|
|
|
вектором. |
|
|
|
|
|
|
|
|
|
|
|
|
Правообладатель Народная асвета |
|||||||||
66 Кинематика
На рисунке 97 радиус-вектор |
r |
характеризует положение тела в момент |
||||||
R |
||||||||
времени t |
|
|
r |
|
1 |
|
|
. |
1 |
, а радиус-вектор R |
— в момент времени t |
||||||
|
|
2 |
|
r |
2 |
|
||
За время |
t = t2 − t1 радиус-вектор |
R повернется на угол Δϕ. Тело движется |
||||||
по окружности, а его радиус-вектор совершает вращательное движение. |
||||||||
В СИ угол поворота измеряется в радианах (сокращенно — р д). 1 рад — |
||||||||
это центральный угол, длина дуги которого равна радиусу окружности (см.
рис. 97, угол COD). Значит, если тело пройдет по окружнос и пу ь s, то значение
угла поворота его радиус-вектора в радианах будет равно: |
|
|
а |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Δϕ = |
s |
. |
|
|
|
|
|
|
т |
(1) |
||||
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
е |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Например, если радиус-вектор совершает один полный оборот, то путь будет |
||||||||||||||||||||
равен длине окружности s |
= 2πR, а угол поворота Δϕ = |
s1 |
|
|
= 2π рад. Так как в гра- |
|||||||||||||||
|
|
|
||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вR |
|
|
|
|
|
|
||
дусной мере угол Δϕ = 360°, то 2π рад = 360°, 1 рад = |
360° |
|
≈ 57,30° ≈ 57°18t. |
|||||||||||||||||
|
2 π |
|||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
с |
|
|
|
|
|
||||
Рассмотрим самое простое из криволинейных движений — равномерное |
||||||||||||||||||||
движение по окружности. |
|
|
а |
|
|
|
|
|
|
|
|
|
||||||||
В этом случае за любые р вные промежутки времени тело проходит одина- |
||||||||||||||||||||
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ковые пути и модуль линейной скорости v = const. Однако направление вектора |
||||||||||||||||||||
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v непрерывно изменяется (см. рися. 97). Значит, при равномерном движении по |
||||||||||||||||||||
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
окружности (как и при любом криволинейном движении) линейная скорость тела |
||||||||||||||||||||
|
r |
uuuuuur |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
непостоянна: v |
≠ const. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если тело движется по окружности равномерно, то его радиус-вектор совер- |
||||||||||||||||||||
шает равномерн е вращениен. Быстроту вращательного движения характеризуют |
||||||||||||||||||||
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
угловой скор стью. Ее бозначают буквой ω (омега). При равномерном враще- |
||||||||||||||||||||
нии угловая ск |
|
сть равна отношению угла поворота радиус-вектора к про- |
||||||||||||||||||
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
межутку в емени, за который этот поворот произошел: |
|
|
|
|
||||||||||||||||
Н |
|
|
|
|
|
ω = |
|
ϕ |
. |
|
|
|
|
|
|
|
|
|
(2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
||
Числовое значение угловой скорости показывает, на какой угол повернется радиус-вектор за единицу времени. При равномерном вращении угловая скорость постоянна.
Единицей угловой скорости в СИ является 1 радиан в секунду 1 радс .
Как связаны между собой модуль линейной скорости v тела, движущегося по окружности, и угловая скорость ω вращения его радиус-вектора?
Правообладатель Народная асвета
Криволинейное движение. Линейная и угловая скорости |
67 |
|
|
Подставив Δϕ из формулы (1) в формулу (2), получим: ω = |
s |
|
. Отношение |
|||||
|
|
R |
|
|||||||
|
s |
= v. Значит, |
|
|
|
|
t |
|
||
|
|
|
|
|
|
|
|
|
||
|
t |
|
|
|
|
|||||
|
|
ω = |
v |
. |
|
|
|
|
(3) |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
R |
|
|
|
|
|
|
|
|
Важной характеристикой равномерного движения тела по окружности явля- |
||||||||
ется период обращения. |
|
|
|
|
||||||
|
|
Период обращения равен времени, за которое тело (ма ери льн я очка) |
||||||||
делает один полный оборот по окружности. |
|
|
а |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Обозначим период буквой Т. За время Т радиус-вектор поворачивае ся на |
||||||||
угол Δϕ = 2π. Значит, согласно формуле (2) угловая скорость равном рного вра- |
||||||||
|
|
|
|
|
в |
т |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
щения: |
с |
е |
|
|||||
|
ω = 2 π. |
|
(4) |
|||||
|
|
T |
|
|
|
|
||
С периодом и угловой скоростью связ на ч |
тота вращения. Ее обычно |
|||||||
обозначают греческой буквой ν (ню).
Частота вращения равна отношению числа оборотов к промежутку време-
ни, за которое они совершены. |
а |
|
|
||||||||
|
|
|
|
|
|
|
|
|
совершается за единицу |
||
Ее числовое значение показывает, сколько оборотова |
|||||||||||
времени. Пусть за 2 с сделано N = 10 оборотов. Тогда частота вращения равна |
|||||||||||
|
|
|
|
|
|
|
|
н |
|
|
|
5 оборотам в секунду, а время одного оборота, т. е. период Т = 0,2 с. Таким об- |
|||||||||||
разом, частота есть величи а, обр т я я |
|
|
|||||||||
периоду: |
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
ν = |
1 |
. |
|
(5) |
|
|
||
|
|
|
T |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
||||
Единицей част ты вращения в СИ |
|
|
|||||||||
является |
1 обо т в секундуд, |
или |
|
|
|||||||
1 = с−1 . |
а |
|
|
|
|
|
|
|
|
||
Из фо мул (4) и (5) находим: |
|
|
|||||||||
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω = 2πν. |
|
|
(6) |
|
|
|||
Мы рассмотрели движение тела по |
|
|
|||||||||
окружности. Рассмотрим теперь тело, |
|
|
|||||||||
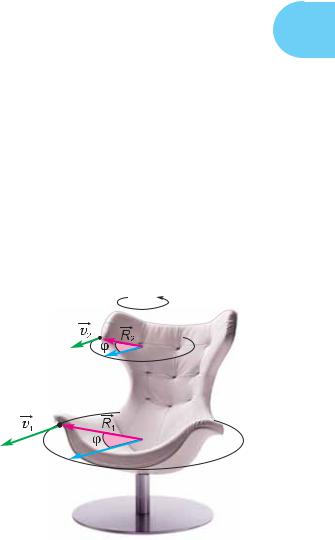
равномерно вращающееся вокруг не- |
|
|
|||||||||
подвижной оси (рис. 98). |
|
|
|
|
|||||||
ТочкиН, находящиеся на оси, поко- |
|
|
|||||||||
|
|
||||||||||
ятся. Остальные точки тела описыва- |
|
|
|||||||||
ют окружности, лежащие в плоскостях, |
|
Рис. 98 |
|||||||||
Правообладатель Народная асвета
68 Кинематика
перпендикулярных оси вращения. Если тело в процессе вращения не деформируется, то углы поворота ϕ радиус-векторов этих точек за одно и то же время оди-
наковы (см. рис. 98). Значит, период, частота и угловая скорость для точек
такого тела также одинаковы. |
|
|
|
а |
|
|
|
|
|
||
В то же время модули линейной скорости точек тела зависят от их рассто- |
|||||
яния до оси (см. рис. 98). Согласно формуле (3) |
|
т |
|||
|
|
||||
|
|
v = ωR. |
|
|
|
Модули линейных скоростей точек вращающегося ела прямо пропорци- |
|||||
ональны расстоянию до оси вращения (см. рис. 98). |
|
||||
|
|
|
|
|
|
Главные выводы |
|
|
в |
|
|
1. |
Угловая скорость вращательного движения чиеленно равна углу пово- |
||||
|
|
|
а |
|
|
рота радиус-вектора за единицу времени. |
|
|
|||
2. |
Единица угловой скорости — 1 р ди н в екунду. |
|
|||
3. |
Частота вращения есть величина, обр тн я периоду. |
||||
4. |
|
я |
|
|
|
Модули линейных скоростей точек врсщ ющегося тела прямо пропор- |
|||||
циональны расстоянию до оси вращения. |
|
|
|||
|
|
|
|
|
|
Контрольные вопросы |
|
|
|
|
|
1.Постоянна ли скорость тела при его равномерном движении по окружности? Постоянен ли модуль этой скорости? Почему?
2.Какой физический смысл имеет угловая скорость? В каких единицах она измеряется?
3.Как угловаяоскорость связа а с линейной?
4.Как связан период обращения с угловой скоростью? С частотой вращения?В л электродвигателя кофемолки совершает N = 45 оборотов за времяна
|
а |
|
|
|
|
|
|
|
|
|
|
|
t = 6,0 с. Определите период, частоту и угловую скорость равномерного враще- |
||||||||||||
Н |
|
|
|
|
|
|
|
|
|
|
||
ния в ла. |
|
|
|
|
|
|
|
|
|
|
||
Дано: |
|
|
Частота вращения: |
|
|
|
|
Решение |
||||
N = 45 |
|
|
N |
|
|
|
|
45 |
|
|
||
t = 6,0 с |
|
ν = |
; |
ν = |
|
= 7,5 c−1. |
||||||
|
t |
6,0 c |
||||||||||
|
|
|
|
|
|
|
|
|
||||
T — ? |
|
|
Учитывая связь между периодом и частотой, находим: |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ν — ? |
|
|
T = |
|
1 |
|
|
= |
|
1 |
|
= 0,13 c. |
ω — ? |
|
|
|
ν |
|
|
7,5 c−1 |
|||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||||
Правообладатель Народная асвета
Криволинейное движение. Линейная и угловая скорости |
69 |
Угловая скорость:
ω = 2πν = 6,28 рад 7,5 с−1 = 47 радс .
|
Ответ: Т = 0,13 с; ν = 7,5 с−1; ω = 47 |
рад |
. |
|
|
|
|
а |
|||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
Упражнение 9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Сколько |
радиан |
содержит |
центральный |
|
е |
|
|
|||||||||||||||
угол, длина дуги которого равна диаметру окруж- |
в |
т |
|||||||||||||||||||||
ности? Половине длины окружности? |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||
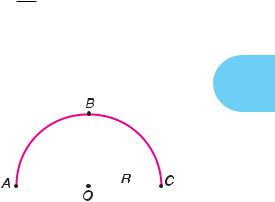
|
2. Желоб, изогнутыйввидеполовиныокруж- |
с |
|
||||||||||||||||||||
ности радиусом R, лежит на столе (рис. 99, вид |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||
сверху). По желобу из точки А в точку С равно- |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||
мерно катится шарик. Какой путь он прошел? |
|
|
|
|
|
|
|||||||||||||||||
Чему равны перемещение и модуль перемеще- |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||
ния шарика? Изобразите векторы линейной ско- |
|
|
|
|
Рис. 99 |
||||||||||||||||||
рости шарика в точках А, В и С. |
|
а |
|
|
|
|
|
|
|
|
|||||||||||||
|
3. Используя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
r |
r |
решение предыдущей задачи,анайдите и изобразите векторы: |
|||||||||||||||||||||
r |
|
r |
|
|
|
r |
|
r |
|
|
r |
r |
|
r |
|
|
|
|
|
|
|||
v1 |
= vВ |
− vA , |
v2 |
= vС |
− vВ |
и |
|
v3 |
= vС − vA . |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
||
|
4. Чему равно отношение пути к модулю перемещения при движении шарика |
||||||||||||||||||||||
(см. рис. 99): а) из точки А в точку В; б)яиз точки А в точку С? Какой вывод из |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
1 |
|
|
|
||
этих расчетов можно сделать? |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
5. Определите угловую скорость, частоту вращения и период равномерно |
||||||||||||||||||||||
вращающегося велосипе ного колеса, если за промежуток времени |
t = 1,0 с оно |
||||||||||||||||||||||
делает четверть об р та. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
6. При |
|
|
|
р |
|
|
|
|
|
|
|
колесо |
за время t = 8 c |
совершает |
||||||||
|
равномерн м вращении одно |
|
|||||||||||||||||||||
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
N1 = 240 оборотов, а д уг е за время t2 = 40 c — N2 = 600 оборотов. Во сколько |
|||||||||||||||||||||||
раз отлич ются их угловыеоскорости? |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
7. Бар б н центрифуги для отжима белья вращается равномерно с частотой |
||||||||||||||||||||||
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ν = 600 |
|
1 |
. Ди метр барабана d = 40 см. Определите период и угловую ско- |
||||||||||||||||||||
|
мин |
||||||||||||||||||||||
рость вращения барабана. Найдите модуль линейной скорости точек на его поверхности.
8.Определите периоды, частоты и угловые скорости вращения часовой, минутной и секундной стрелок часов.
9.Определите угловую и линейную скорости обращения Земли вокруг Солнца. Расстояние от Земли до Солнца принять равным R = 150 000 000 км.
Правообладатель Народная асвета
70 Кинематика
§ 15. Ускорение точки при ее движении по окружности
При равномерном прямолинейном движении ускорение равно нулю. А почему оно не равно нулю при равномерном движении по окружности? Как это ускорение направлено? Чему равен его модуль?
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пусть |
тело |
(р ссм |
рив емое |
как |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
материальная очка) движе ся равномер- |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
но по окружнос и радиусом R. За проме- |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
жуток рем ни |
t т ло переместилось из |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
точки А точку В (рис. 100). Хотя модуль |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
скоро ти v приеэтом был постоянным, |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
изменение |
|
корости |
r |
r |
r |
|
r |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
= vB − vA |
≠ 0. |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поэтому |
вне равно нулю и ускорение |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тела, определяемое как |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
r |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
r |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
= |
|
v |
( |
t → 0). |
|
|
|
(1) |
|||||||||
Рис. 100 |
|
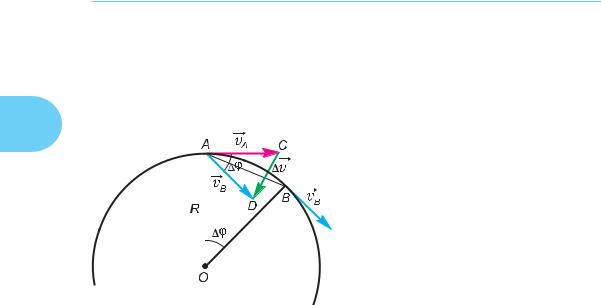
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
Найдем это ускорение. |
r |
|
|
|
||||||||||||
|
Перенесем вектор |
|
в точку А (см. рис. 100) и построим вектор |
По- |
|||||||||||||||||||||||||||||||||
|
vB |
v. |
|||||||||||||||||||||||||||||||||||
лучившиеся треугольники АCD и ОАВ подобны: они оба равнобедренные и име- |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
я |
АD |
0 OB). Из подобия треугольников |
||||||||||||||||||||||||
ют равные углы Δϕ (так к к АC 0 |
OA, |
|
|||||||||||||||||||||||||||||||||||
следует: |
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
н |
|
|
|
v |
= |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
v |
|
R |
|
|
|
|
|
|
|
|
|
|
|
uuur |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Разде- |
|||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r — модуль перемещения AB. |
|||||||||||||||||||||
v — м дуль изменения скорости, а |
|
||||||||||||||||||||||||||||||||||||
лим обе части равенства (2) на t: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
о |
|
|
|
|
v |
|
1 |
= |
|
r |
|
|
1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
(3) |
||||||
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
t |
|
v |
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
При м лых промежутках времени отношение |
|
v |
= a, |
т. е. равно модулю уско- |
||||||||||||||||||||||||||||||||
|
|
t |
|||||||||||||||||||||||||||||||||||
|
|
|
отношениер |
r |
= v. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
= |
v |
|
|||||
рения, |
|
С учетом этого равенство (3) примет вид |
, |
||||||||||||||||||||||||||||||||||
откуда |
а |
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
R |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
a = |
v |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Формула (4) определяет модуль ускорения при равномерном движении тела |
||||||||||||||||||||||||||||||||||||
поНокружности. А как направлено это ускорение? |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
Направление вектора |
r |
совпадает с тем направлением, которое примет век- |
||||||||||||||||||||||||||||||||||
|
a |
||||||||||||||||||||||||||||||||||||
тор |
r |
|
при t → 0 (см. формулу (1)). Из рисунка 100 видно, что чем меньше |
|
t |
||||||||||||||||||||||||||||||||
v |
|
|
|||||||||||||||||||||||||||||||||||
Правообладатель Народная асвета