

18. Гибкие обратные связи по току якоря и напряжению управляемого преобразователя. Назначение, исполнение.
Гибкие обратные связи по регулируемой координате есть первая производная от регулируемой координате. Гибкие обратные связи вводятся для повышения качества регулирования: устойчивость, величина перерегулирования, время затухания колебаний.
Как правило если имеется ЖОС используется и ГОС по этой же координате.
Получения сигнала первой производной.
Использование пасивной RC- цепочки

Использования операционного усилителя

Часто возникает необходимость для ввода второй производной по координате и установка по одной RC цепи или ОУ то ни чего не получится. Это достигается след образом:
а )
производная ЭДС генератора. На главный
полюс укладывается обмотка
)
производная ЭДС генератора. На главный
полюс укладывается обмотка
б)Схема ЭКГ 5А используется обмотка маг. усилителя

 Один
из вариантов ГОС по току якоря
Один
из вариантов ГОС по току якоря
Сердечник
доп. полюсов
![]()
ГОС по току якоря Г-Д

Г ОС
напряжению управляемого преобразователя
ОС
напряжению управляемого преобразователя
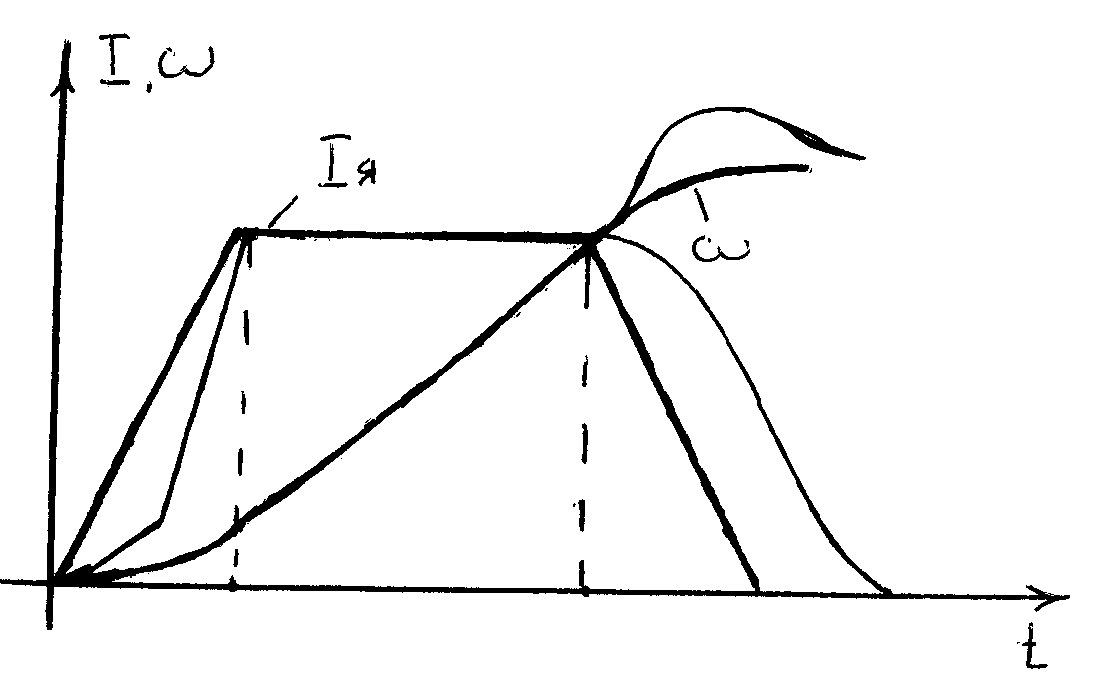
Влияние ГОС на ПП

Введение ГОС уменьшает колебания, уменьшает перерегулирование, но увеличивают длительность перходного процесса

Если будет ГОС то она будет припятствовать уменьшению скороти
19.Датчики эдс двигателя постоянного тока, упругого момента, Iя, u, ω.
Датчик ЭДС двигателя:
![]()
Желание уменьшить статическую ошибку по скорости;
Не желание использовать тахогенераторы в качестве датчика скорости;
Развитие ПП техники;
Появление и внедрение ТП-Д, отпала необходимость системы форсирования по
 .
.
![]()
Датчик двигателя ЭКГ-20 (рис1).
U2 – датчик U2 двигателя.
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Датчики момента:
Косвенные моменты определения момента:
Торсионные приборы: тензометрические датчики.
Стрелки
но номинально нагруженный вал, Едв
в изм. Обмотке будет измеряться
необходимость протестировать магнитный
прибор. БМП, МИМ – по
![]() ;
;
![]() ;
;
![]() ;
;![]() ;
;![]() СОНН.
СОНН.
Косвенное определение момента:
![]() ;
;
![]() ;
;![]() ;
;![]()

2 Ε ω0. Устройство выбора зазора в передачах. Назначение, исполнение, наладка.
to
Εдоп
0,7Iст
ω1нач t













![]()
![]() -стремиться
к нулю,
-стремиться
к нулю,
![]()
.
Ограничить ускорение;. Зафиксирование
во времени
![]() - все зазоры выбраны и оценить, что до
- все зазоры выбраны и оценить, что до![]() - зазор был;
- зазор был;![]() - зазора нет, следовательно, максимальное
ускорение, разгон ЭП.
- зазора нет, следовательно, максимальное
ускорение, разгон ЭП.
![]() -
определяет величину ускорения.
-
определяет величину ускорения.
НЭ
– узел выделения модуля ключ БСРИ –
замкнут {![]() зависит
от сигнала ОС по
зависит
от сигнала ОС по![]() };
};
3.
![]() ,Мс
стремиться к нулю,
,Мс
стремиться к нулю,
![]() ;
Увеличивается в 10, 15, 20 раз.
;
Увеличивается в 10, 15, 20 раз.
![]() разрыв
ключа,“-“ос
разрыв
ключа,“-“ос
![]() - снято ограничение ускорения
- снято ограничение ускорения![]()

Коэффициент динамичности

21.Температурная стабилизация параметров механических харатерстик
![]()
λ-температурный
коэффициент
![]()
Δt
– разница между начальным и конечным
значением температур
![]()
Для
класса изоляции F
![]() ;
;![]() пред
доп тем-ра нагрева обмоток.
пред
доп тем-ра нагрева обмоток.
При работе эл.машин тем-ра обмоток может менятся в зависимости от тем-ру окружающей среды до 140


![]() ;
;
![]() ;
;![]()
![]() это
приведет
это
приведет
![]()
Изменение тока отсечки значительно снижение производительности работающих в режиме частых пусков и стопорений. Для устранения этого явления приходится пренебрегать к частым переналадкам или применять термостабилизационные схемы Решение этой задачи это- температурная стабилизация
Способы температурной стабилизации
 1)ЭШ
10.70А
1)ЭШ
10.70А
![]()
2) ЭКГ-5А

3)
![]()
 Ток
возбуждения всегда стабилизируется и
не зависит от тока якоря
Ток
возбуждения всегда стабилизируется и
не зависит от тока якоря
Способ стабилизации тока возбуждения

Б-23
К главным механизмам одноковшовых экскаваторов относятся подъемный, напорный, поворотный и ходовой механизмы, имеющие различные ха-ры нагрузок при работе экскаватора. Работа подъемного напоного и поворотного механизмов носит циклический ха-ер , при чем для напорного и подъемного механизмов ха-ны резко переменое изминение статического момента сопротивления и колебания скорости пеемещения рабочего органа. Работа поворотных механизмов связана с преодолением больших моментов инерции вращающихся частей экскаваторов. Если из цила работы экскаватора исключить непродолжительные по времени операции маневрирования с ковшом над местом разгрузки , то в расчетах по определению мощности приводов время цикла работы можно разделить на три периода. При таком варианте цикла значительно упрощается построение нагрузочных диаграмм. В эл.схеме главных эл.приводов использован пятиобмоточный силовой трансформатор. Группа двигателей каждого из главных механизмов получает питанае от соответствующего комплектного тиристорного преобразователя. Эл.двигатели хода подключаются контакторами к преобразователю привода поворота , кога последний работает.Управление эл.приводами осуществляет машинист экскаватора. Подъемного: предназначен для управления скоростью и направленим перемещения ковша в вертикальной плоскости. Механизм состоит из подъемной лебедки и канатов. Напор: обеспечивает управление скоростью и направлением поступательного перемещения рукояти с ковшом в горизонтальной плоскости Состоит из напороной лебедки и канатов в канатном варианте или зубчатой плоской передачи в реечном варианте. Поворот: Обеспечивает управление скоростью и направлением вращательного движения полно поворотной платформы экскаватора с установленным на ней оборудовании. ПО нагрузочным диаграммам определяют эквивалентный момент двигателя для каждого из вариантов и продолжительность цикла.
24. ЭП забойных машин, подземных горных машин.
ИО: врубовые, шнековые; механизм подачи: канатное; погрузочное устройство: шнековое, скребковый конвейер, загребающие. Привод электрический: привод ИО – влага, пыль, взрывоопасно; Нагрузка за счет усилий при резании грунта, транспортирование.
Особо низкая частота:
 с
изменением физических свойств грунта
по протяженности забоя;
с
изменением физических свойств грунта
по протяженности забоя;Низкая:
 с изменением радиуса угла резания
определяется конструктивным исполнением
ИО и механической подачи.
с изменением радиуса угла резания
определяется конструктивным исполнением
ИО и механической подачи.Высокая:
 с
трещенноватостью углья по высоте забоя.
с
трещенноватостью углья по высоте забоя.
АД к.з. для привода ИО.
Особенность работы двигателя: имеют рудничные взрывобезопасные исполнения, с увеличением мощности привода ограничиваются габариты, следовательно, отдельная серия электродвигателей.
Механизм подачи: реечный; режим работы: продолжительный; нагрузка -реактивная; привод – нереверсивный( реверс не оперативный); Д=7-10:1; регулируемая угловая скорость подачи безступенчатый;
Системы приводов:1. Гидропривод. 2. ЭП: АД кз – ЭМС; ТП-ДПТ; ПЧ-АД кз
«+» гидропривода: небольшие габариты, несложная аппаратура управления, несложное средство ограничения перегрузок, НО: уменьшается КПД; уменьшение надежности, снижение долговечности и охлаждения.