

25 Эл привод ленточных конвейеров
Условия работы: 1Окружающая среда - значительный перепад температур, повышенная запыленность воздуха, влажность. 2 Режим работы продолжительный с редкими пусками и остановами. Длительное время пуска не оказывает влияния на производительность. 3. Нагрузки изменяются плавно в широких диапазонах, нагрузка реактивная. Грузопоток в одном направлении
Особенности
а)
![]() Ускорение мало => длительность пуска
велика. б)
Ускорение мало => длительность пуска
велика. б)![]() ограничить ускорение в)Провисание ленты
с грузом это есть ни что иное как климат
зазор поэтому необходимо плавно выбрать
зазор. г) возможна пробуксовка ленты
м/д приводным барабаном и тяговым орнаном
ограничить ускорение в)Провисание ленты
с грузом это есть ни что иное как климат
зазор поэтому необходимо плавно выбрать
зазор. г) возможна пробуксовка ленты
м/д приводным барабаном и тяговым орнаном
1 )условие
Зйлера
)условие
Зйлера![]()
Предъявляемые требования
Плавность пуска при наличии (тяжелый ПП) и отсутствии (легкий ПП) груза с надежным ограничением ускорения, момента развиваемого двигателем, и рывка.
Обеспечение выбора люфта в редукторе и предварительного натяжения ленты ( выбор кинематического зазора)
Для увеличения срока службы желательно регулировать скорость в D=2:1
Для устранения пробуксовке ленты желательно регулировать величену ее натяжения.
Кратность пускового момента 1,5-2
Желат мех-я хар-ка

Системы приводов:
АДКЗ – привод не регулируемый, не ограничивается ускорение.
Для более ответственных приводов АДФЗ
Широкоимпульс регул сопратив в цепи ротора

Синхронный двигатель а) Тяжелый пуск б) Жесткая механическая характеристика = > демпфирующая способность =0
Система АВК
Система ПЧ-АД
Требования к системам управления конвейерных линий
Обеспечение треб пуска в направлении обратном грузопотоку
Треб продолжительности пуска каждого конвейера.
Пуск конвейерной линии осуществляется в функции скорости тягового органа
Остановка конвейера из любой точке
Оварииная остановка при затянувшемся пуске , уменьшении скорости ленты, при обрыве ленты, при образовании завалов в местах перегрузки, при сходе ленты .
Возможность пуска конвейера с местного поста управления
Перегрев важных подшипников
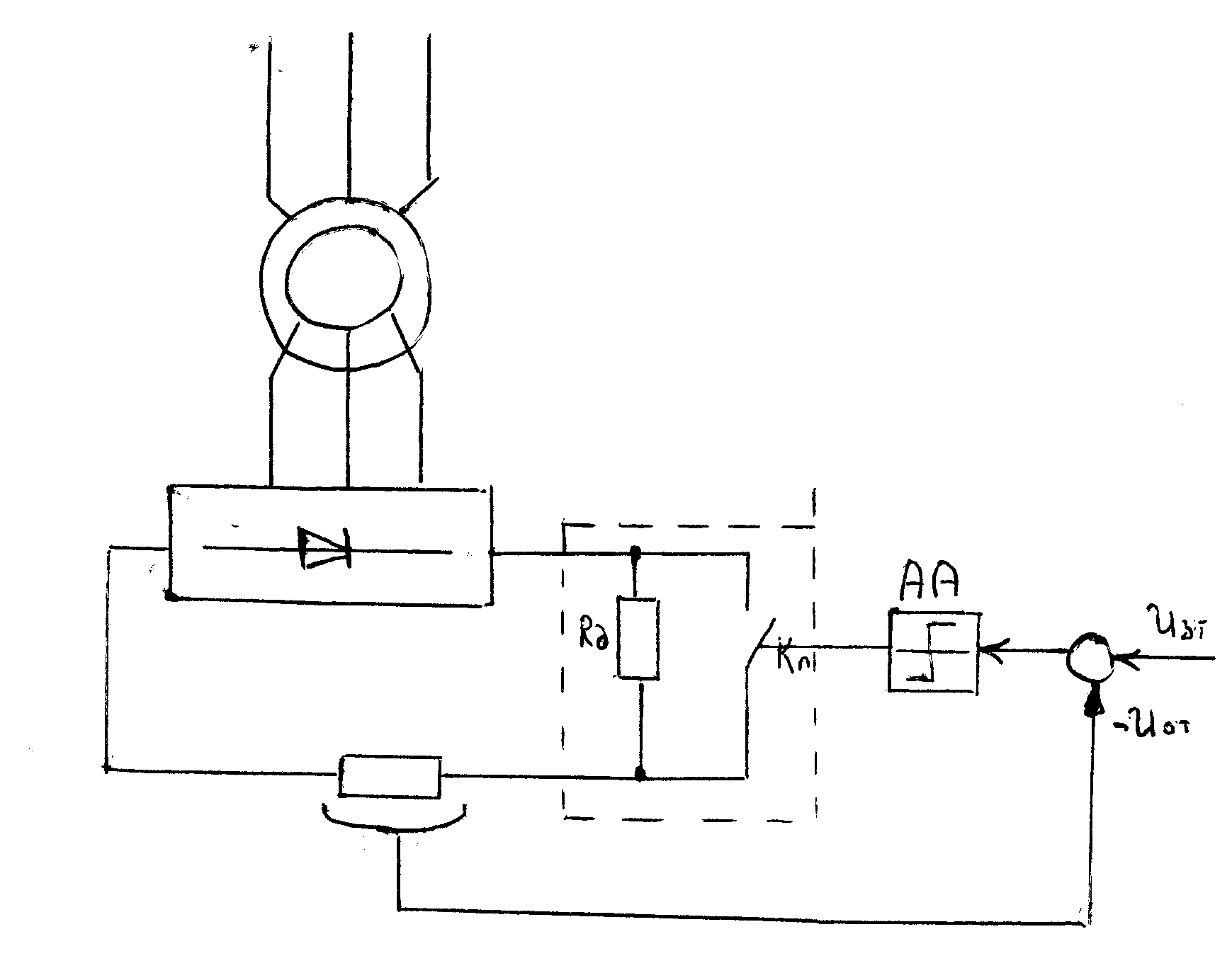
У зел
контроля пуска конвейера
зел
контроля пуска конвейера
След функции :
Создание повышенного натяжение в ленте сбегающей ветви
Усилие загруженности ленты необходимо регулировать в зависимости отзагружености
26. Эп механизмов центробежного типа (насосы, вентиляторы, компрессоры винтовые)
Как следует из рассмотренного выше, механизмы центробежного и поршневого типов в силу особенностей их конструкции и условий технологического процесса не требуют реверсирования. Их скорость согласуется со скоростью двигателя, поэтому электропривод этих установок выполняется безредукторным и поставляется обычно комплектно с механизмом.
Отличительной особенностью рассматриваемой группы механизмов являются облегченные условия их пуска. Эти механизмы как в нормальных условиях, так и после аварийного отключения пускаются как правило, вхолостую. При этом момент трогания не превышает 30—35% номинального момента. Для установок вентиляторного типа, которые пускаются под нагрузкой, момент сопротивления плавно возрастает с увеличением скорости, что благоприятно согласуется с формой механической характеристики асинхронного двигателя. В результате прямой пуск вентилятора с асинхронным короткозамкнутым двигателем или синхронным двигателем с асинхронной пусковой обмоткой происходит под действием практически неизменного динамического момента Мдин (рис. 7-9). Отмеченные особенности механизмов центробежного и поршневого типов позволяют в большинстве случаев для их привода использовать нерегулируемые асинхронные двигатели с короткозамкнутым ротором. В установках значительной мощности (сотни — тысячи киловатт) целесообразно применение синхронных двигателей, позволяющих активно влиять на результирующую реактивную мощность, потребляемую из сети промышленным предприятием.
На некоторых крупных установках вентиляторного типа (гребные винты, шахтные вентиляторы, дымососы, аэродинамические трубы и т. п.) суммарный момент инерции электропривода значительно превышает момент инерции двигателя. При этом прямой пуск оказывается затянутым и сопровождается существенным нагревом обмоток асинхронного короткозамкнутого или синхронного двигателя. Поэтому в электроприводе указанных установок находят применение асинхронные двигатели с фазным ротором и в том случае, когда регулирование скорости не требуется. Реостатный способ пуска таких двигателей облегчает процесс разгона установки, уменьшает пусковые токи и нагрев обмоток двигателей.
Режим работы: продолжительный с редкими пусками. В силу конструктивных особенностей и технологического процесса данные машины и установки не требуют реверсирования. Нагрузка изменяется плавно.
![]()
где, Мст0 – момент механического сопротивления при трогании
![]() -
момент аэро (гидро) динамического
сопротивления
-
момент аэро (гидро) динамического
сопротивления
n – для вентиляторов 2
Безредукторные ЭП
Q – подача (м3/с) – производительность
Н – напор (Па)
Способы подачи:
Дросселирование (накопление) в напорной магистрали
Рецеркуляция – нагнетание потока
Поворот направленных лопаток на входе рабочего колеса
Изменение числа работающих агрегатов
Изменение скорости вращения рабочего колеса
Каждая вентиляторная (насосная) установка сопровождается индивидуальной действительной характеристикой
Н=f(Q)
N=f(Q)
η=f(Q)
Важное условие установки – экономичность

В установках, требующих плавного и автоматического регулирования подачи, электропривод выполняется регулируемым.
Из законов пропорциональности вытекает, что требуемый диапазон регулирования скорости при условии отсутствия статического напора не превышает заданный диапазон изменения подачи:
Н – напор, Q - подача
![]() ;
;
![]()
![]() -
мощность на валу двигателя
-
мощность на валу двигателя
;![]()
3. Характеристика сети на которую работает данная машина показывает какое требуется давление от вентилятора, от насоса для обеспечения требуемой подачи и покрытия всех потерь в системе.
3’ – уменьшим эквивалентное сечение сети
Если установка работает с пониженной производительностью то двигатель работает с пониженной мощностью
![]()
![]()
КПД остается постоянным, следовательно зависимость 2 смещается вниз
Для установок сравнительно небольшой мощности (7 —10 кВт) задача регулирования успешно решается с помощью системы регулятор напряжения — асинхронный двигатель с короткозамкнутым ротором. В настоящее время в качестве регулятора напряжения все большее применение находит тиристорный коммутатор.

Обычно изменение технологического режима, в котором участвует регулируемый электропривод, протекает достаточно медленно и не требует от привода высокого быстродействия. Поэтому в качестве регулятора напряжения может быть использован и трехфазный магнитный усилитель МУ, включенный в цепь статора.




На рис. 7-15 приведена схема вентильного каскада с возвращением потерь скольжения в сеть. Эта схема нашла применение для электропривода газодувок. Напряжение ротора приводного асинхронного двигателя выпрямляется с помощью неуправляемых вентилей В, собранных по трехфазной мостовой схеме. Выпрямленное напряжение подается на группу управляемых вентилей УВ, работающих в инверторном режиме и включенных по шестифазной схеме.

А) Динамический момент при пуске привода механизма центробежного типа

![]() -
вентиляторная характеристика
-
вентиляторная характеристика
Б) СД

![]()
Разгонный двигатель предназначен для разгона СД
Двигатель работает в режиме идеального холостого хода
В) АДфр – для осуществления тяжелого запуска вентиляторной установки

А) ТРН-АДкз


Вентиляторы:
Д(диапазон регулирования скорости)=2:1
Насосы: Д=3:1
Б) АДкз+ЭМС
В) АДкз, p=var

Г) каскадная схема

Д) ПЧ-АД




ТРН – АД

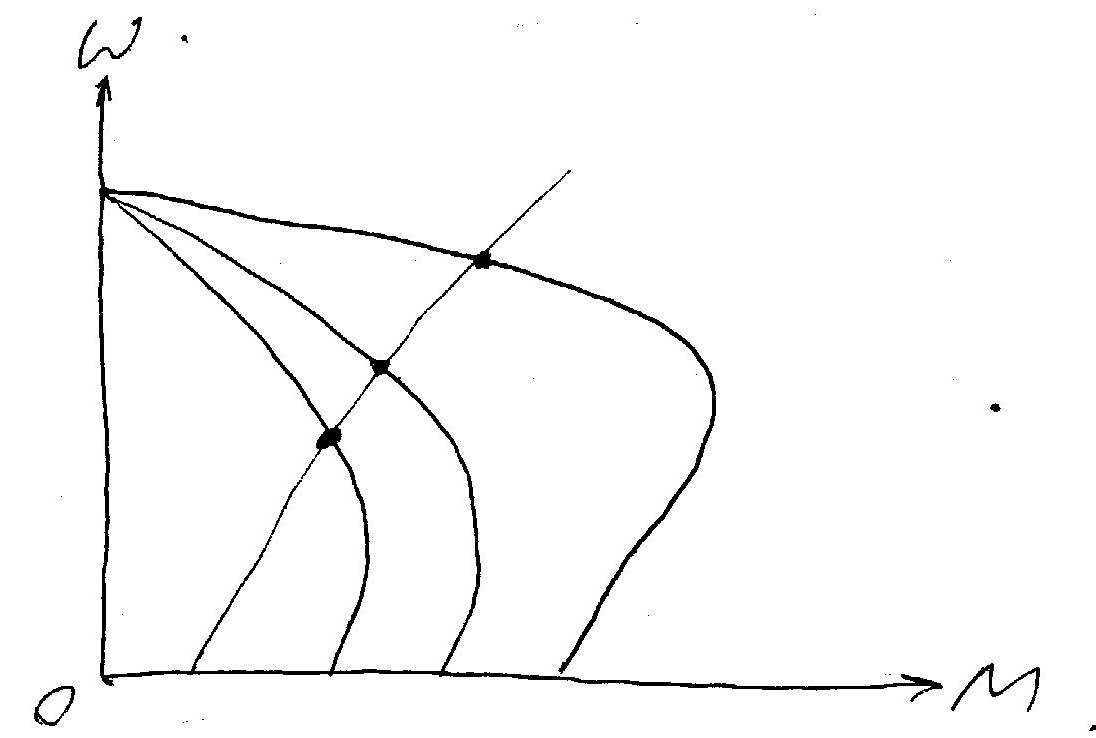
Если использовать внешнюю ОС по скорости то можно получить семейство характеристик в 1м квадранте
Когда все тиристоры в цепи статора закрыты
![]()
Мягкий пуск двигателя:
![]()
ТРН – тиристорный преобразователь напряжения
Достоинства системы:
ТРН-АД
ППН(преобразователь переменного напряжения)-АД
Простота силовых цепей и сетей управления
Сравнение:
Меньше габариты и стоимость
Высокий КПД преобразователя (примерно 99%)
Двухсторонний обмен энергией
Использование естественной коммутации тиристоров
Хорошие показатели преобразователя при полном открывании тиристоров
Cosf тиристора = cosf двигателя
Практически отсутствуют высшие гармоники как на входе так и на выходе преобразователя
КПД привода = КПД привода на естественной механической характеристике
Достаточно просто обеспечить огранечение момента, развиваемого двигателем в динамических режимах работы
Несложно обеспечить динамическое торможение привода
К основным недостаткам отнесем:
1. Низкий КПД в режиме стабилизации скорости если w<wн
2. Большие потери энергии в АД, что исключает длительную работу двигателя
Для получения жестких параллельных характеристик в первом квадранте необходимо ввести жесткую отрицательную обратную связь по скорости. Чтобы двигатель не перегревался при больших скольжениях принимают двигатель завышенной мощности.