

28. Эп основных механизмов роторных экскаваторов
ЭП роторного колеса
Условия работы:
Окружающая среда:
Значительный перепад температур
Повышенная влажность
Повышенная запыленность (500-800 мг/м3)
Режим работы: длительный с резким п. ят., нагрузка реактивная, изменяющаяся в значительных пределах, носит колебательный характер.
1я гармоника. 0,04-0,08Гц – изменение форм, свойств грунта
2я гармоника. 0,14 Гц – радиальное биение роторного колеса
3я гармоника 1,3 (2,6) Гц – частота гармоник, обусловленная входом – выходом ковшей из забоя (9-18 ковшей)
4я гармоника. 30-40Гц – определяется скалой и трещеноватостью разраб грунта до 0,5Мс
![]() -
собственные колебания
-
собственные колебания
При работе роторного колеса наблюдаются перегрузки - технологические с мягким стопорением и жесткие с мгновенной остановкой
В приводе поворота формируется экскаваторная характеристика и используют фуфты предельного момента.
Требования к ЭП роторного колеса:
Высокая надежность двигателя и аппаратуры управления
Закрытое исполнение двигателя
Повышенная механическая прочность двигателя
Автоматическое огранечение нагрузок путем …. Электромеханической характеристики (kотс=0,8), применение муфт предельного момента, автоматическая защита в аварийных режимах
Для обеспечения рациональных режимов резания различных грунтов и так же для устранения резанирующих колебаний желательно бесступенчатое регулирование скорости роторного колеса Д=1.5-2:1. Так же привод должен обеспечить пониженную скорость вращения роторного колеса (0,3wном)
Жесткая механическая характеристика на рабочем участке
Так как нагрузка оперативная не требуется оперативного реверсирования привода
Вследствие большого момента ин. СУЭП должна обеспечить плавное изменение скорости (ограничить ускорение)
Двигатель: минимальный вес и габариты. Применяют следующие системы приводов: малая и средняя Q нерегулируемый привод АДКЗ (для ограничения I(M,E)) на время пуска в цепь статора вводят добавочное сопротивление. Средняя и большая Q применяют одно - или многодвигательный нерегулируемый привод с АДФ.
Сверхмощные экскаваторы – привод постоянного тока ТВ-ГД, ТП-Д. Более 550 м3/ч СУ замкнутые ОСС если ОСТЯ – то задержанная. Вводятся формирующие ОС по рег. коорд.
Структура замкнутых СУЭП:
- с суммирующим усилителем
- СПРК
АДФ – не применяется
![]()
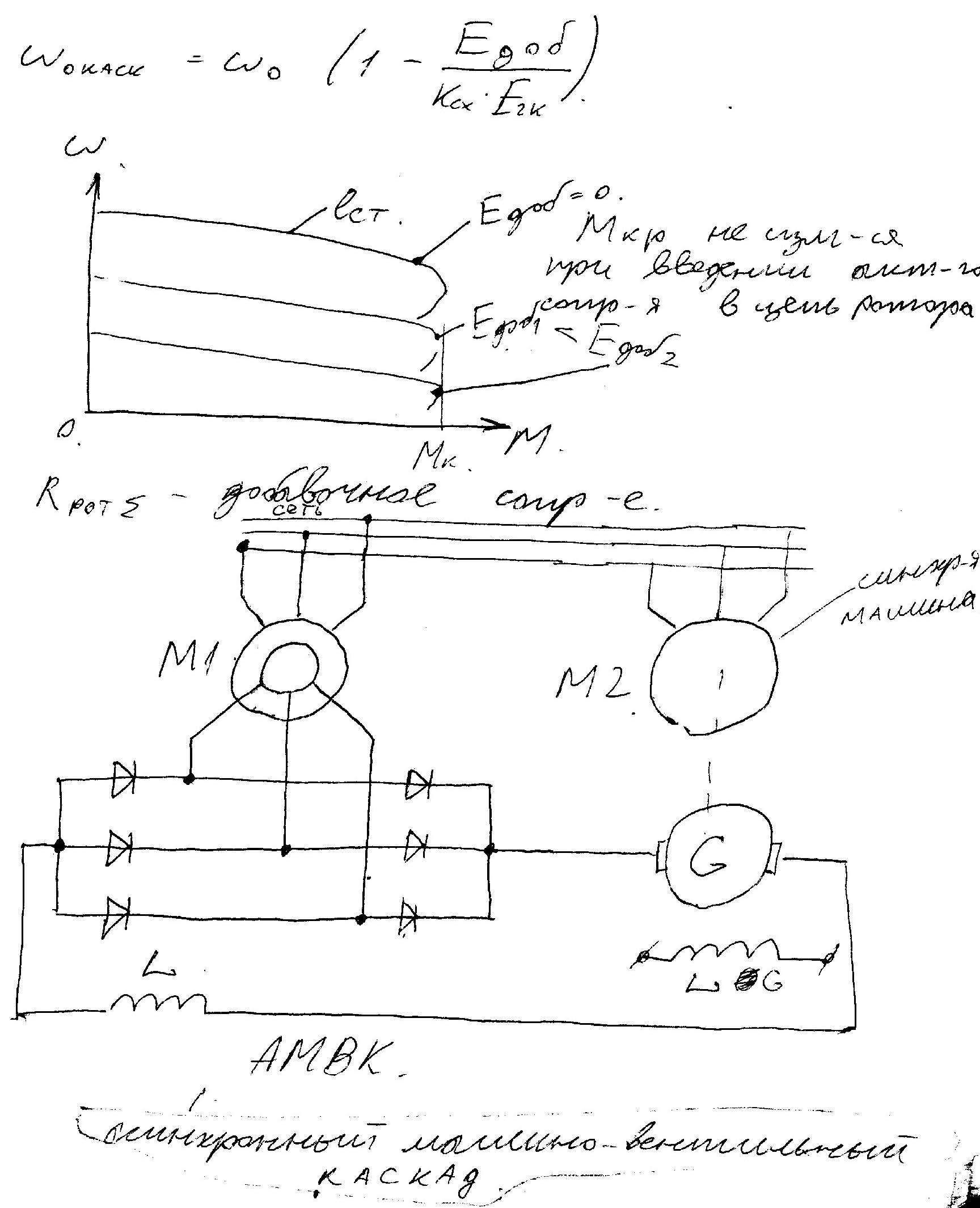
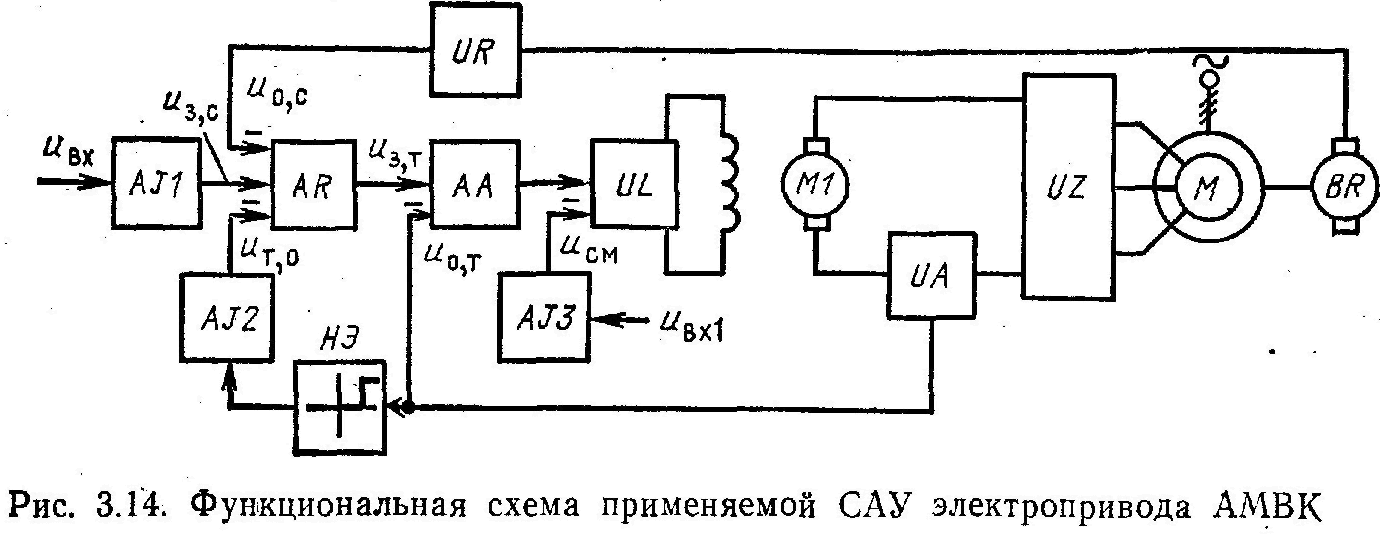
СИСТЕМА АСИНХРОННЫЙ МАШИННО-ВЕНТИЛЬНЫЙ КАСКАД
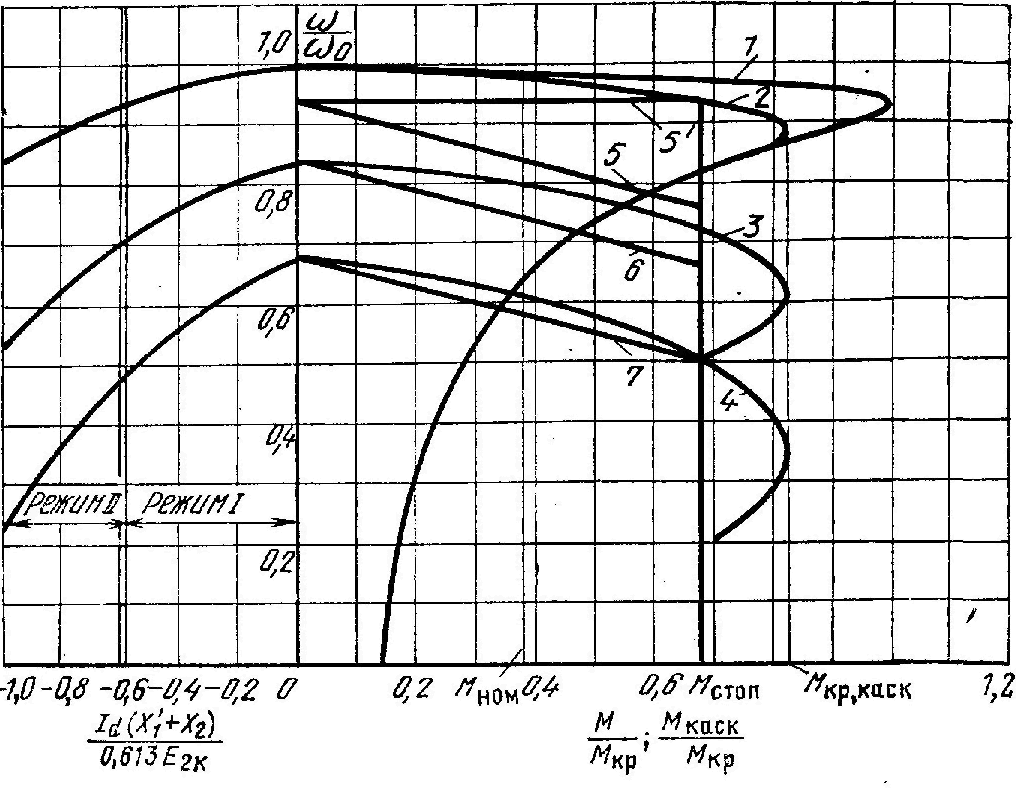
Система асинхронного машинно-вентильного каскада (АМВК) применяется для электропривода роторного колеса экскаватора ЭРШРД-5250.
В системе АМВК рабочий механизм приводится во вращение асинхронным двигателем с фазным ротором, устройство и характеристики которого рассмотрены в § 2.2.
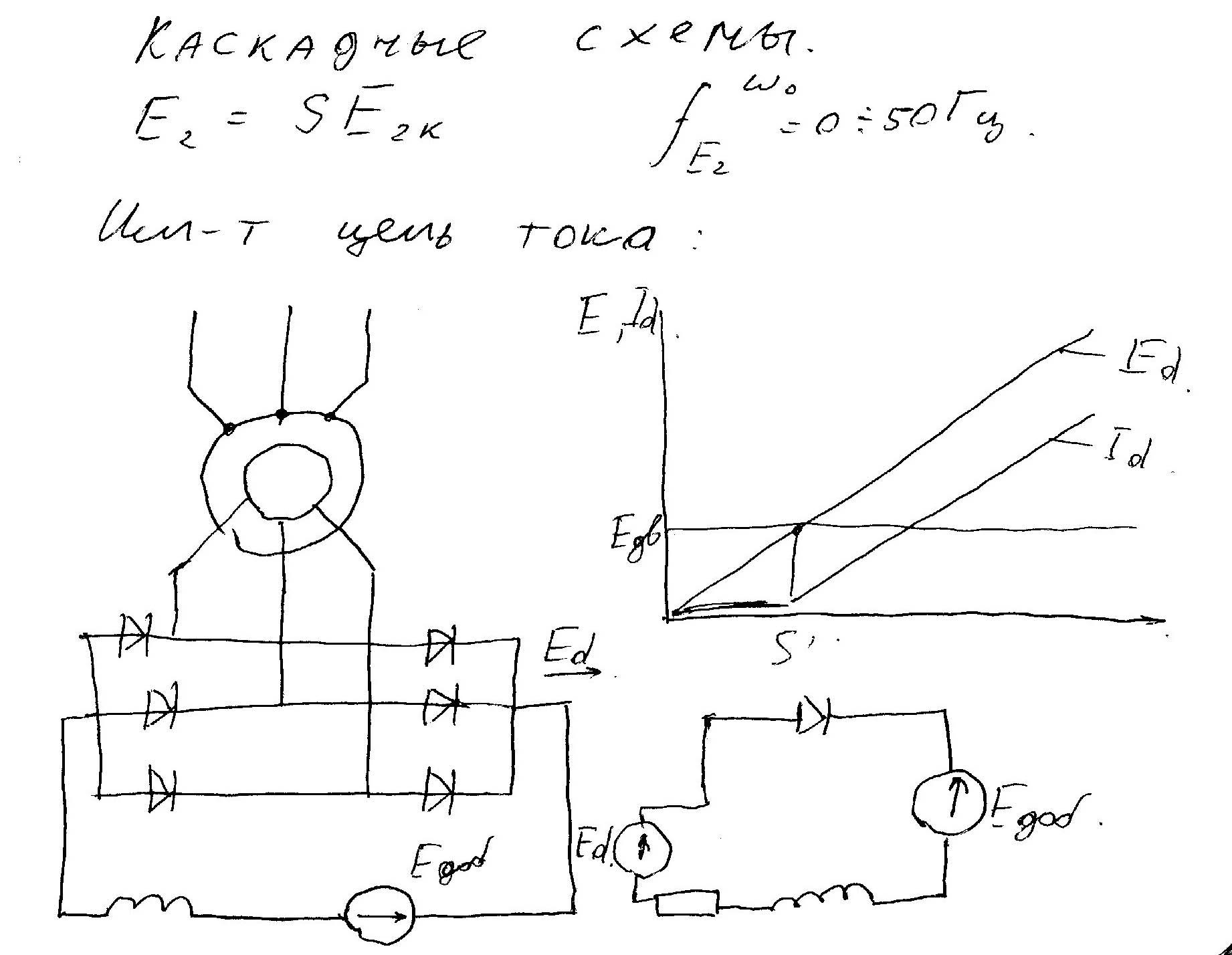
Статор двигателя подключается непосредственно к сети. Регулирование скорости заключается во введении в цепь ротора двигателя ЭДС Едоб, которая всегда направлена встречно ЭДС, наводимой вращающимся магнитным полем в роторе Е2ks, где Е2k —• напряжение на кольцах разомкнутой обмотки заторможенного ротора (см. табл. П.З), которое в последующих выкладках принимается для соединения обмоток в звезду. По существу, это эквивалентно введению в цепь обмоток ротора добавочных активных сопротивлений R2доб=Eдоб/I2, изменяющихся обратно пропорционально току ротора I2. Следовательно, каждая электромеханическая (механическая) характеристика в системе АМВК складывается из бесконечного множества реостатных характеристик двигателя. Однако поскольку вместо активного резистора R2доб используется источник ЭДС Едоб энергия скольжения Мw0st потребляется этим источником, а не идет на нагрев добавочного резистора.
Статические характеристики разомкнутой системы. Для построения и анализа характеристик электропривода обратимся к схеме силовой части системы АМВК (рис. 3.12,а) и схеме ее замещения (рис. 3.12,6).
Переменное напряжение, снимаемое с контактных колец ротора двигателя М (рис. 3.12,а), преобразуется неуправляемым
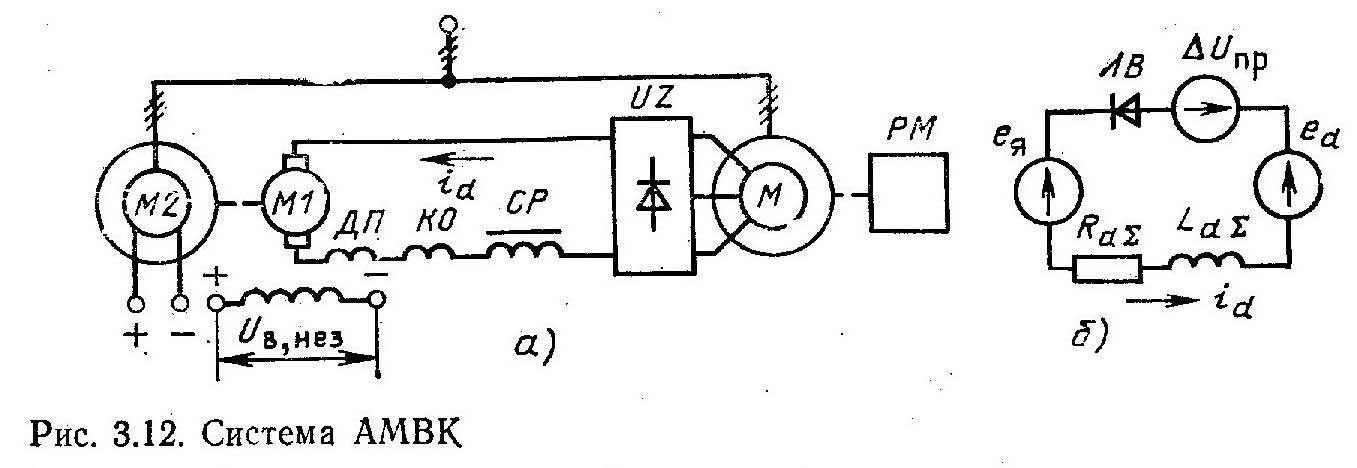
мостовым выпрямителем UZ. в постоянное напряжение и прикладывается к цепи выпрямленного тока, включающей обмотку якоря вспомогательной машины постоянного тока М1, ее компенсационную обмотку КО и дополнительные полюсы ЦП, а также сглаживающий реактор СР. Машина М1 вместе с синхронной машиной М2 образует электромашинный преобразовательный агрегат. Постоянное напряжение, вырабатываемое М1, всегда направлено навстречу напряжению выпрямителя.
При наличии нагрузки на валу машины М мощность переменного тока Мwоs преобразуется выпрямителем UZ в мощность постоянного тока, возникает ток Id, протекающий в направлении, противоположном ЭДС ея вспомогательной машины М1, на валу которой при наличии потока возбуждения возникает электромагнитный момент, направленный согласно с направлением вращения якоря. Происходит преобразование электрической мощности в механическую, которая передается на вал синхронной машины М2, преобразуется ею в электрическую мощность и отдается в сеть.
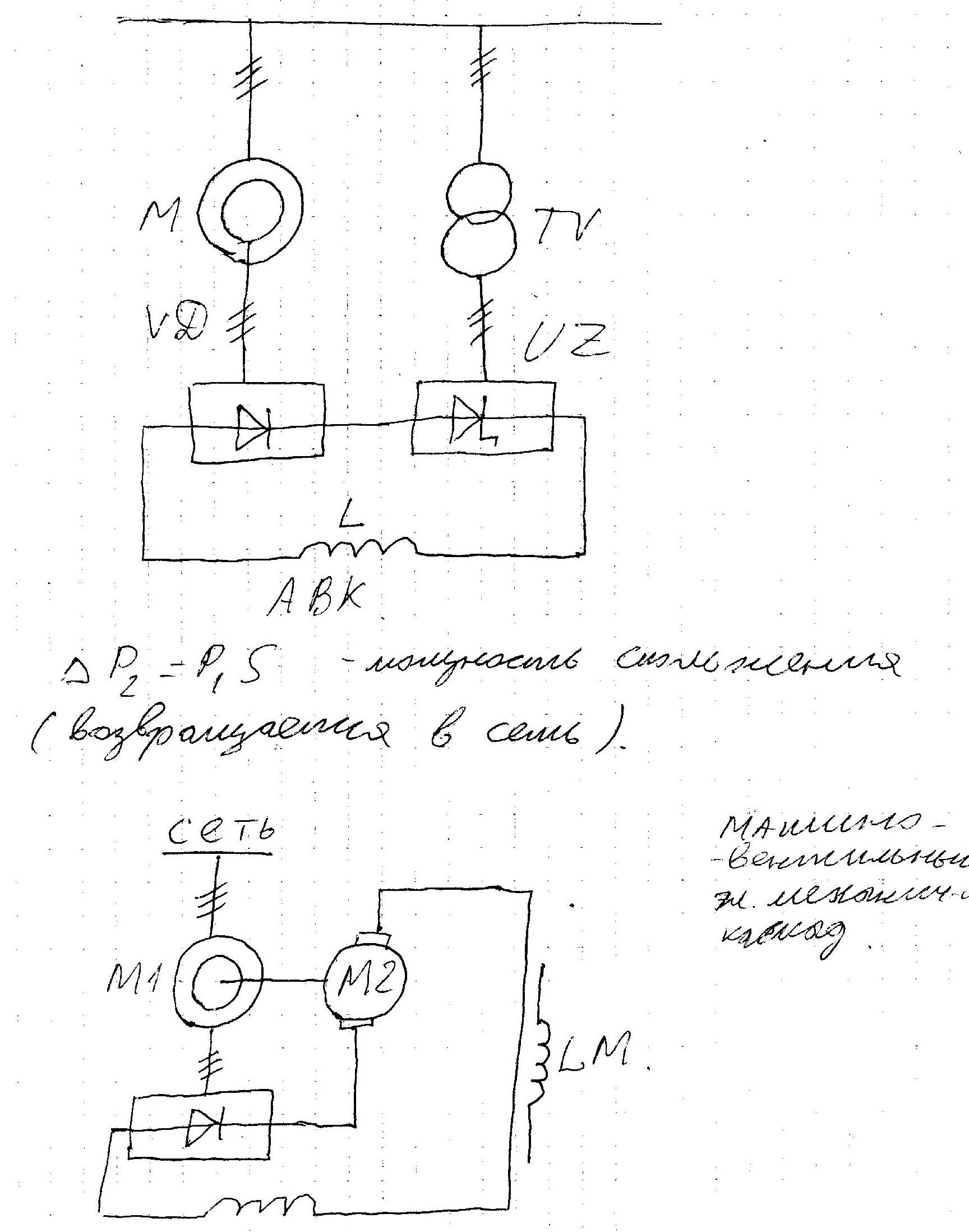
Таким образом, энергия скольжения в системе АМВК за вычетом потерь, имеющих место в цепи выпрямленного тока и при преобразованиях энергии, возвращается в сеть. Этим обеспечивается более высокая экономичность регулирования по сравнению с реостатным способом.
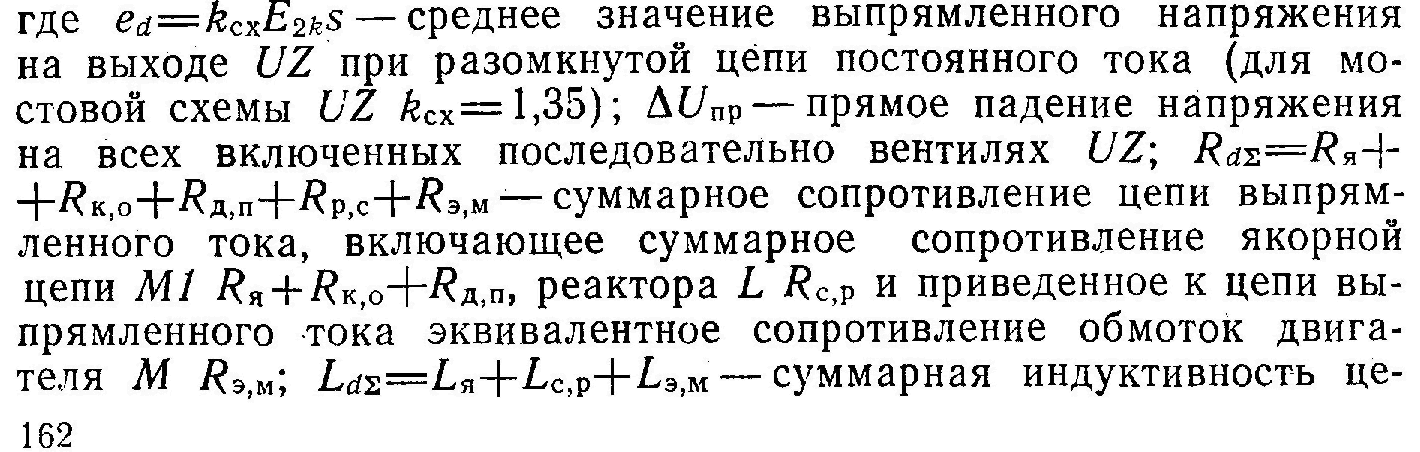
По схеме замещения (рис. 3.12,6) запишем уравнение электрического равновесия для цепи выпрямленного тока системы
![]()


Требования к ЭП поворота роторной стрелы
СУЭП ЭП поворота роторной стрелы должна обеспечить бесступенчатое регулирование скорости Д>=(7-10)/1 и обеспечить оперативное реверсирование ЭП
Жесткость рабочего участка механической характеристики д.б такой, чтобы относительная ошибка регулирования скорости д.б. не более 5-7%. С другой стороны жесткость рабочего участка механической характеристики должна быть такой, чтобы могла обеспечить максимальную демпфирующую способность привода
Автоматическое ограничение момента, развиваемого двигателем путем формирования экскаваторной характеристики Котс=0,9-1
Надежное ограничение рывка и ускорения как при пуске так и при торможении путем использования задатчика интенсивности как первого так второго рода.
Желательно регулировать скорость поворота роторной стрелы в зависимости от нагрузки ЭП роторного колеса вплоть до его остановки. ТВ-Г-Д, ТП-Д.