

1.11.Автоматическое регулирование перетоков мощности
При максимальной загрузке межсистемных и внутрисистемных ЛЭП (транзитов) их надежная работа обеспечивается с помощью устройств автоматического регулирования перетоков активной мощности (АРПМ).
Наилучшие результаты достигаются при так называемом балансирующем действии АРПМ.

Рис. 1 12. Принцип балансирующего действия АРПМ на межсистемной линии электропередачи.
Если переток мощности, направленный из энергосистемы I в энергосистему II, превышает уставку устройства АРПМ, последнее воздействует одновременно на уменьшение мощности электростанций энергосистемы I и увеличение мощности электростанций энергосистемы II. При таком действии АРПМ частота в ЭЭС остается неизменной, а следовательно, остаются неизменным перетоки мощности по другим ЛЭП.
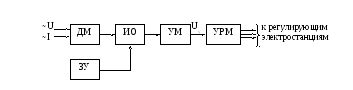
Рис. 1.13. Структурная схема АРПМ.
Основным органом устройства АРПМ является измерительный орган ИО, который подключен к датчику мощности ДМ. Измерительный орган ИО сопоставляет фактическую мощность, передаваемую по ЛЭП, с уставкой, задаваемую устройством ЗУ, и создает на своем выходе напряжение, которое пропорционально отклонению перетока мощности, а знак соответствует знаку отклонения. Выходное напряжение обычно усиливается усилителем мощности УМ.
Регулятор перетока АРПМ возвращает переток мощности к заданной уставке при его отклонении от уставки как в сторону увеличения, так и в сторону уменьшения. Однако в ряде случаев имеется необходимость регулировать переток мощности только в сторону уменьшения, т.е. ограничивать его максимальное значение. В этих случаях АРПМ выполняется для работы в режиме ограничения и соответственно называется автоматическим ограничителем перетока мощности (АОПМ). Автоматическое ограничение перетока мощности обычно осуществляется с большим быстродействием, чем регулирование перетока.
1.12. Математическая формулировка задачи оптимизации режима ээс
Математически можно сформулировать задачу оптимизации следующим образом. Имеется функция n переменных – F(x1, x 2, ..., x n). Эти переменные связаны между собой k уравнениями или неравенствами связи:
 (1.14)
(1.14)
где W1, W2, ..., Wk - некоторые функции переменных xi (i = 1,2,...n).
Требуется найти минимум функции F.
Решение задачи оптимизации при ограничениях в форме неравенств требует применения весьма сложных методов оптимизации (метод Куна-Таккера и др.). Будем рассматривать более простые методы оптимизации при ограничениях переменных в форме уравнений. В этом случае число уравнений k должно быть меньше n.
1.13. Метод Лагранжа
При решении задач оптимизации режима широко применяется метод неопределенных множителей Лагранжа. При этом вместо условий экстремума функции F(х1, х2, ...хn) n переменных, связанных между собой k соотношениями (1.14), ищут условия экстремума функции Лагранжа
![]() (1.15)
(1.15)
где i (i=1,2,...k) – постоянные множители, определяемые при отыскании функции F. Эти множители называются неопределенными множителями Лагранжа.
Приравняв нулю, частные производные от S по всем n переменным функциям, получим следующие n уравнений:
 (1.16)
(1.16)
Из n уравнений (1.16) и k уравнений связи (1.14) составим всего (n+k) уравнений. Число неизвестных также равно (n+k), а именно: n искомых значений переменных - х1, х2,...хn - и k множителей Лагранжа - 1, 2, ...k.
Это дает возможность найти аргументы, соответствующие экстремуму функции S. Но эти же значения, как известно, характеризуют и экстремум минимизируемой функции F.
В рассмотренном методе определялись аргументы, соответствующие экстремуму минимизируемой функции F. Чтобы найденный экстремум действительно был бы минимумом, необходимо проверить знак второго дифференциала функций F или S. Если d2F 0 или d2S 0, то данный экстремум является минимумом.
Определение знака d2F или d2S очень сложно. На основании опыта исходят из ряда допущений, позволяющих считать, что найденный экстремум является минимумом.
В качестве примеров применения метода Лагранжа рассмотрим ряд упрощенных задач по оптимизации распределения мощностей.
1. При неучете влияния изменений потерь в сетях Р и суммарных нагрузок узловых точек Рн оптимальное распределение активной мощности может быть найдено следующим образом.
Обозначим суммарные затраты, минимум которых соответствует оптимальному режиму, через Т. Искомыми переменными являются значения активной мощности отдельных агрегатов (или станций) Р1, Р2, ...Рn, где n - число агрегатов (или станций).
Допустим, что суммарные затраты зависят только от величины активных мощностей, т.е.:
Т = f (Р1, Р2, ..., Рn) (1.17)
Далее считаем, что станции – ТЭС.
Искомые переменные связаны одним уравнением баланса активных мощностей:
W = Р1 + Р2 + ... + Рn - Рн - Р = 0, (1.18)
где по допущению Рн = const и Р = const.
При этом функция Лагранжа
S = T + W (1.19)
Условия экстремума соответствуют равенству нулю частных производных от S по всем n переменным:
 (1.20)
(1.20)
Уравнения (1.20) можно записать иначе:
![]() (1.21)
(1.21)
Т.к. суммарные затраты равны сумме затрат по каждому из агрегатов, т.е.
Т = Т1 + Т2 +...+ Тn,
то
![]() . (1.22)
. (1.22)
Частная производная от затрат на каком-либо агрегате по активной мощности агрегата называется удельным приростом затрат агрегата и обозначается буквой . Она зависит от величины активной мощности:
![]() (1.23)
(1.23)
При этом условия оптимального распределения активных мощностей записываются следующим образом:
 1
= 2
= ... = n;
1
= 2
= ... = n;
(1.24)
Р1 + Р2 + ... + Рn = Рн + Р.
Уравнения (1.24) определяют оптимальные значения Р1, Р2, ..., Рn активных мощностей отдельных агрегатов. Таким образом, при неучете изменений суммарной нагрузки узловых точек и потерь в сетях условием оптимального распределения активных мощностей является принцип равенства удельных приростов отдельных агрегатов.
Найдем условия, при которых в данном случае получается минимум затрат. Найдем знак второго дифференциала от S
d2S = d2T +d2W, (1.25)
где

![]()
Вторые смешанные частные производные от Т всегда равны нулю, т.к. удельный прирост одного агрегата не зависит от мощности второго агрегата. Поэтому
 (1.26)
(1.26)
Очевидно также, что
![]()
т.к.
![]()
Следовательно, условие d2S 0 имеет место, если
 (1.27)
(1.27)
т.е. из неубывающих кривых 1, 2, ... n хотя бы одна является возрастающей. Это означает, что удельные приросты не снижаются при росте активной мощности, а хотя бы у одного из агрегатов возрастают.
2. При учете влияния изменения потерь в сетях, но при неизменности активных нагрузок узловых точек оптимальное распределение активной мощности находится таким образом.
Пусть суммарные потери активной мощности в сетях Р зависят только от величины активных мощностей агрегатов, т.е.
Р = f (Р1, Р2, ..., Рn)
Исходя из уравнений (1.17) – (1.19), получим условия оптимального распределения активной мощности:
 (1.28)
(1.28)
откуда
 ... (1.29)
... (1.29)
Уравнения (1.29) совместно с уравнением баланса активных мощностей решают оптимальное распределение активной мощности с учетом изменения потерь в сетях. При этом необходимо знать не только зависимости
i = f (Рi),
но и зависимости потерь мощности и частных производных от потерь мощности по активным мощностям агрегатов от Р1, Р2, ..., Рn, т.е.
Р = Ф (Р1,
Р2,
..., Рn);
![]() =
fi
(Р1,
Р2,
..., Рn).
=
fi
(Р1,
Р2,
..., Рn).
Величина
= -
называется удельным приростом
энергосистемы при учете потерь в сетях,
а выражение
 - соответственно удельным
приростом
агрегата i
с учетом потерь в сетях.
- соответственно удельным
приростом
агрегата i
с учетом потерь в сетях.