

1.5.3. Кутове прискорення
Кутове прискорення характеризує змiну кутової швидкостi за часом. Аналогiчно до означень, наведених в п. 1.3.3, розрiзняють середнє i миттєве кутове прискорення.
Середнє
кутове прискорення (![]() )
визначається вiдношенням змiни кутової
швидкостi до вiдповiдного промiжку часу:
)
визначається вiдношенням змiни кутової
швидкостi до вiдповiдного промiжку часу:
![]() (1.49)
(1.49)
Для
миттєвого кутового прискорення (або
просто кутового прискорення)
![]() можна записати:
можна записати:
 (1.50)
(1.50)
Тобто воно чисельно дорiвнює першiй похiднiй кутової швидкості за часом або другiй похiднiй кута повороту за часом. Вимiрюється кутове прискорення в радiанах на секунду в квадратi (рад/с2). Воно також є псевдовектором, спрямованим по осi обертання
![]() (1.51)
(1.51)
На
рис.1.11,
в напрямок
![]() вiдповiдає прискореному руху по колу,
напрямок
вiдповiдає прискореному руху по колу,
напрямок
![]() — сповiльненому руху по колу.
— сповiльненому руху по колу.
Знайдемо зв’язок мiж лiнiйними i кутовими характеристиками руху.
1. Зв’язок мiж лiнiйною i кутовою швидкiстю:
![]()
тобто
![]() (1.52)
(1.52)
2. Зв’язок мiж тангенцiальним i кутовим прискоренням:
![]()
тобто
![]() (1.53)
(1.53)
3. Зв’язок між нормальним прискоренням і кутовою швидкістю:
тобто
![]() (1.54)
(1.54)
Для розв’язання оберненої задачi під час руху точки по колу використовують вирази аналогiчнi виразам (1.33) та (1.35):
 (1.55)
(1.55)
 (1.
56)
(1.
56)
Тодi для рiвнозмiнного руху по колу вiдповiднi математичнi перетворення дадуть вирази аналогiчнi виразам (1.36), (1.37),(1.38):
![]() (1.57)
(1.57)
 (1.58)
(1.58)
![]() (1.59)
(1.59)
де
![]() — початкова кутова швидкiсть у момент
часу t=0,
— початкова кутова швидкiсть у момент
часу t=0,
![]() — кутова
швидкiсть
у момент часу t.
— кутова
швидкiсть
у момент часу t.
1.6. Основи кiнематики руху абсолютно твердого тiла
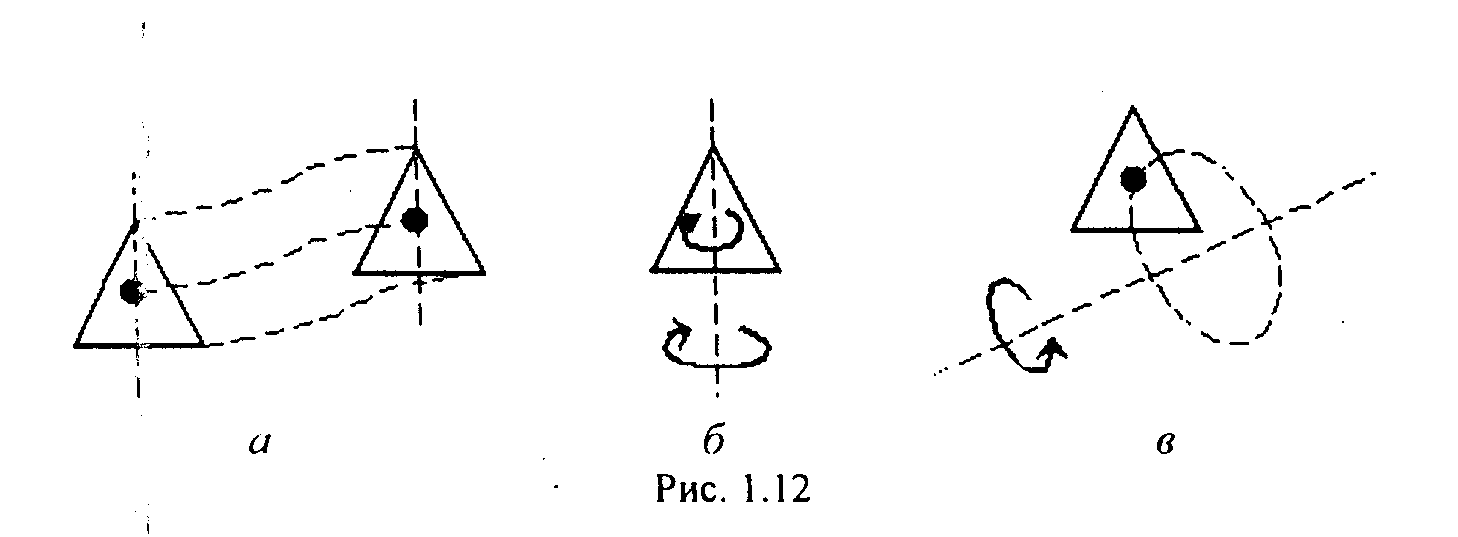
Будь-який складний рух абсолютно твердого тiла (АТТ) можна подати як суму незалежних поступальних i обертальних рухiв.
При поступальному русi будь-що пряма, що жорстко зв’язана з тiлом, залишаєгься паралельною за самої себе (рис. 1.12,а). Обертальним називається рух, коли всi точки тiла описують кола, центри яких лежать на однiй прямiй — осi обертання (рис. 1.12, б, в). Незалежнi рухи описуються за допомогою числа степенів вільності. Числом степенiв вiльностi (i) називається найменша кiлькiсть незалежних величин, за допомогою яких може бути задане положення тiла (або системи) в просторi.
Для
визначення положення АТТ в декартових
координатах при поступальному русi слід
задати координати (х,
у, z)
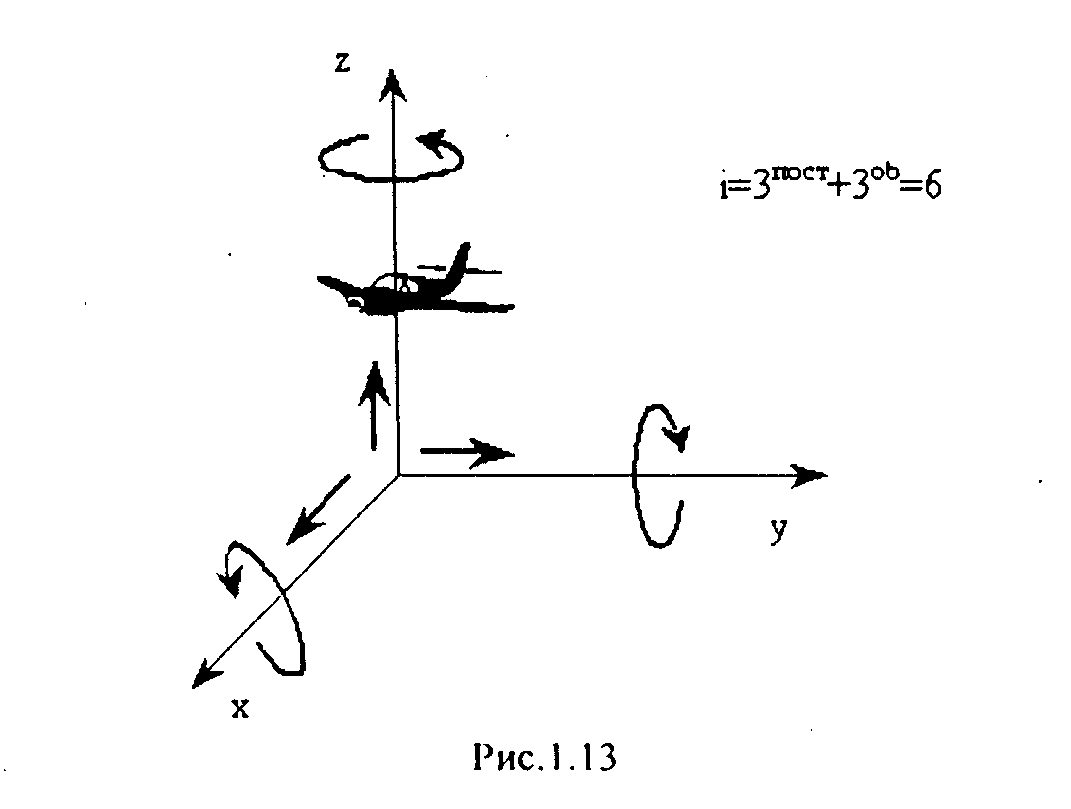
будь—якої однiєї його точки. Для
визначення орiєнтацiї АТТ у просторi при
обертальному русi слід вказати куги
![]() ,
на якi може повертатися тiло навколо
вiдповiдних осей. Наприклад, лiтак, що
розглядається як АТТ, має шiсть степенiв
вiльностi: три поступальнi та три обертальнi
(рис. 1.13).
,
на якi може повертатися тiло навколо
вiдповiдних осей. Наприклад, лiтак, що
розглядається як АТТ, має шiсть степенiв
вiльностi: три поступальнi та три обертальнi
(рис. 1.13).
При обмеженнi вiльностi руху кiлькiсть степенiв вiльностi зменшується. Наприклад, тверде тiло, одну з точок якого нерухомо закрiплено, може тiльки обертатися навколо цiєї точки, а поступальний рух у нього взагалi вiдсутнiй. Тому в цьому разі тiло матиме тiльки три степенi вiльностi (обертальнi). Тверде тiло, що обертається навколо закрiпленої осi, має тiльки одну степінь вiльностi якщо воно може пересуватися вздовж цiєї осi, то двi степенi вiльностi й т.д.
Будь-яке макроскопiчне тiло можна уявно роздiлити на малi частини (елементарнi об’єми), кожну з яких можна вважати за матеріальну точку (МТ). Таким чином, тiло буде подано як сукупність МТ.
В ідповідно
до означення АТТ можна розглядати як
сукупнiсть матерiальних точок, вiдстань
мiж якими не змiнюється. Тому, при
поступальному русi АТТ всi його точки
рухаються однаковими траєкторiями. Це
означає, що всi вони в будь-який момент
часу мають однаковi швидкостi й прискорення.
З цього випливає, що для описування
поступального руху АТТ достатньо
розглянути рух будь-якої однiєї його
точки. Таким чином, кiнематика поступального
руху АТТ зводиться до кінематики
поступального руху матеріальної точки,
що розглянута в п. 1.3.
ідповідно
до означення АТТ можна розглядати як
сукупнiсть матерiальних точок, вiдстань
мiж якими не змiнюється. Тому, при
поступальному русi АТТ всi його точки
рухаються однаковими траєкторiями. Це
означає, що всi вони в будь-який момент
часу мають однаковi швидкостi й прискорення.
З цього випливає, що для описування
поступального руху АТТ достатньо
розглянути рух будь-якої однiєї його
точки. Таким чином, кiнематика поступального
руху АТТ зводиться до кінематики
поступального руху матеріальної точки,
що розглянута в п. 1.3.
З усiх можливих обертальних рухiв АТТ розглянемо обертальний рух навколо нерухомої осi. Вiссю обертання О´О називається пряма, на якiй лежать центри кiл, що описують точки твердого тiла при його обертаннi (рис. 1.14).
Як
зазначалося вище, в цьому разі тiло має
одну степiнь вiльностi. Його положення
в просторi однозначно визначається
кутом повороту
![]() ,
який є однаковим для всiх точок тiла за
один i той же час. Тому кутовi швидкостi
й кутовi прискорення для всiх точок тiла
теж однаковi i визначаються за формулами
(1.44), (1.51). Лiнiйнi ж характеристики у точок
рiзнi, наприклад,
,
який є однаковим для всiх точок тiла за
один i той же час. Тому кутовi швидкостi
й кутовi прискорення для всiх точок тiла
теж однаковi i визначаються за формулами
(1.44), (1.51). Лiнiйнi ж характеристики у точок
рiзнi, наприклад,
![]() (1.60)
(1.60)
i
залежать вiд вiдстанi
![]() конкретної точки до осi обертання. В
такому випадку зручно користуватися
виразами зв’язку мiж лiнiйними i кутовими
характеристиками (див.формули (1.52),
(1.53). (1.54)).
конкретної точки до осi обертання. В
такому випадку зручно користуватися
виразами зв’язку мiж лiнiйними i кутовими
характеристиками (див.формули (1.52),
(1.53). (1.54)).
2. ДІНАМIКА
Розглянемо основнi закони динамiки — тiєї частини класичної механiки, що вивчає причини виникнення i змiни руху тiл. Для цього, перш за все, слід ввести динамiчнi характеристики руху. Будемо дотримуватися тiєї ж послiдовностi, що i в кiнематицi: спочатку розглянемо поступальний рух, а потiм — обертальний. У кiнцi розділу розглянемо питання пов’язанi з енергiєю i роботою в механiцi.