4. Исполнительная подсистема
Рис.4.26. Радиально-поршневой пневмомотор
Сжатый воздух одновременно подается в две рабочие камеры пневмомотора, например 1 и 2, через крановый распределитель 5, установленный на выходном валу. При этом соответствующие поршни, перемещаясь к нижней «мертвой точке», передают усилие на коленчатый вал через свои шатуны. После поворота вала, а вместе с ним и распределителя на некоторый угол сжатый воздух подается в рабочие камеры 2 и 3, а отработавший воздух из камер 4 и 1 сбрасывается в атмосферу также через крановый распределитель. Далее этот цикл повторяется.
Радиально-поршневые пневмомоторы применяют в больших подъемниках, в приводах различных транспортных средств.
Турбинные пневмомоторы
В турбинных пневмомоторах кинетическая энергия потока сжатого воздуха преобразуется в механическую энергию вращения выходного вала.
Турбинные пневмомоторы позволяют получать очень высокие частоты вращения (80000 — 400000 об/мин) выходного вала и небольшие крутящие моменты на нем по сравнению со частотами и моментами, достигаемыми при использовании, например, поршневых пневмомоторов. Турбинные моторы применяют для высокоскоростного шлифования, а также в зубоврачебной технике в качестве элемента привода бормашины.
71
Пневмомоторы, вне зависимости от их конструктивного типа, обозначают на принципиальных пневматических схемах таким образом, как показано на рис. 4.27.

1
4. Исполнительная подсистема
.4. Специальные пневматические исполнительные устройства
Существует целый ряд пневматических исполнительных устройств, которые нельзя однозначно отнести к одному из ранее описанных типов, в связи с чем такие устройства называют специальными. Рассмотрим наиболее распространенные конструкции.
4.4.1. Цанговые зажимы
Цанговые зажимы широко используют в автоматизированном станочном оборудовании для надежного зажатия и удержания тел вращения в процессе их обработки (рис. 4.28).

Цанговый зажим состоит из следующих основных деталей: цанги 1, обжимной втулки 2, кольцевого поршня 3 с пружинным возвратом, шариков 4 и корпуса 5.
При подаче сжатого воздуха в зажим поршень 3, сжимая возвратную пружину, перемещается влево и вдавливает шарики 4 в клиновой зазор между корпусом 5 и обжимной втулкой 2, которая, в свою очередь, смещается вправо, сжимая лепестки цанги 1 и осуществляя зажатие детали.
Для разжатия заготовки сжатый воздух из поршневой полости сбрасывают в атмосферу, при этом поршень возвращается в исходное положение, освобождая шарики. В результате цанга разжимается, смещая обжимную втулку в исходную позицию.
4.4.2. Пневматические захваты
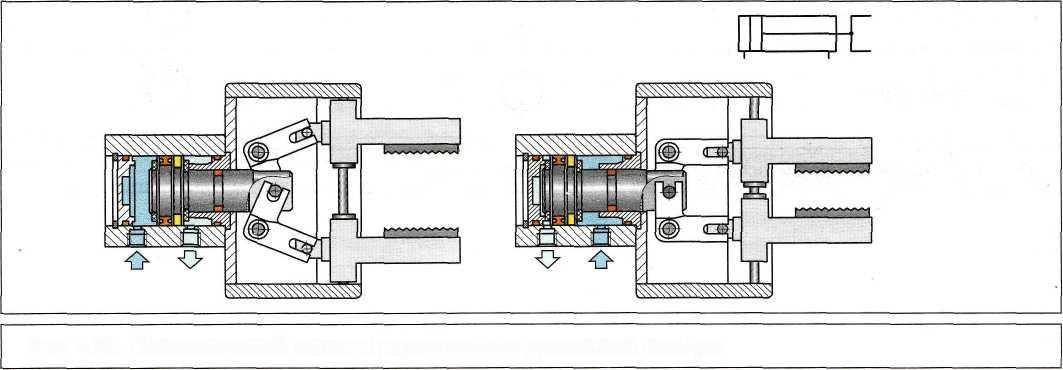
Практически любой робот-манипулятор снабжен захватным устройством, предназначенным для того, чтобы захватить какой-либо объект, удерживать его при перемещении и ориентации в пространстве, после чего отпустить в нужной точке. На рис. 4.29 показана конструкция пневматического захвата с параллельным движением захватных пальцев.
Рис.
4.29. Пневматический захват с параллельным
движением пальцев